






Atuador Planetário MyActuator RMD-X4-10 10N·m Encoder Duplo EtherCAT+CAN Unidade de Junta Robótica
Atuador Planetário MyActuator RMD-X4-10 10N·m Encoder Duplo EtherCAT+CAN Unidade de Junta Robótica
MyActuator
Não foi possível carregar a disponibilidade de recolha
Visão Geral
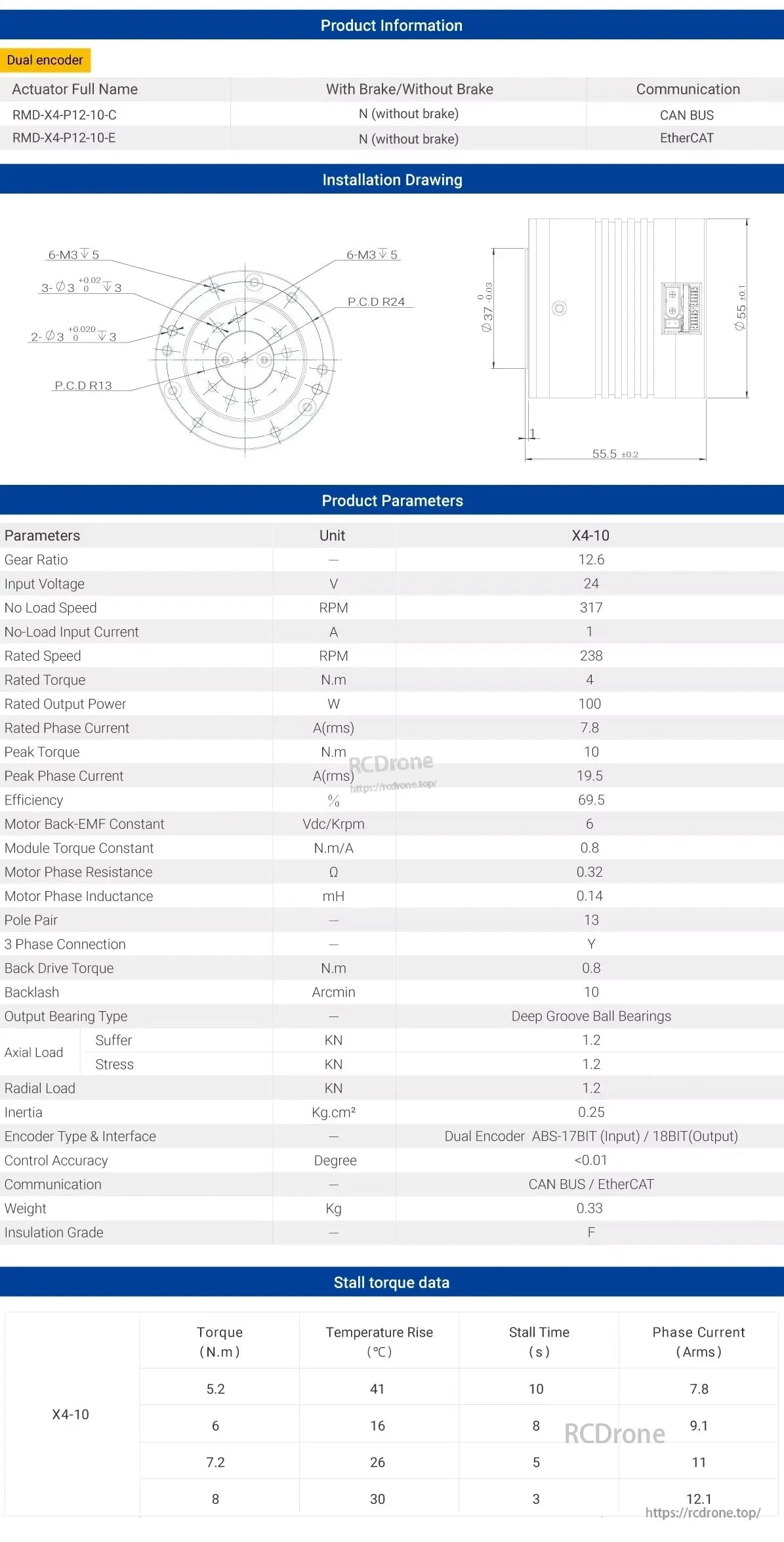
O MyActuator RMD-X4-10 atuador planetário é um módulo de motor DC de alto desempenho projetado para aplicações robóticas avançadas. Com uma relação de engrenagem planetária de 12.6:1, torque máximo de 10N·m, e potência de saída nominal de 100W, integra um sistema de encoder duplo (entrada de 17 bits / saída de 18 bits) que oferece controle de precisão de 0.01°. Sua grande estrutura oca suporta a integração de múltiplos sensores, permitindo um hub central para controle de postura corporal em robôs humanoides. Com comunicação de protocolo duplo EtherCAT e CAN, o atuador alcança resposta ultra-rápida de 250μs, tornando-o ideal para cenários de alta dinâmica e alta confiabilidade, como robôs humanoides, acionamentos de pernas biónicas e automação industrial.
Principais Características
-
Encoder Duplo de Alta Precisão: entrada de 17 bits / saída de 18 bits com 0.01° precisão
-
Torque de Pico 10N·m com relação de engrenagem planetária de 12.6:1
-
Rolamento de Rolo Cruzado: Capacidade excepcional de momento anti-flexão para articulações robóticas estáveis
-
Comunicação Dual EtherCAT + CAN Bus: Suporta ligação de múltiplas máquinas, resposta ultra-rápida de 250μs
-
Grande Estrutura Oca: Permite a integração de sensores, cabos e anéis deslizantes para sistemas robóticos complexos
-
Alta Confiabilidade: Projetado para controle de marcha humanoide, transições suaves para correr, saltar e movimentos complexos
-
Compacto & Leve: Φ55mm × 55.5mm, peso 0.33kg
Especificações
| Parâmetro | Valor |
|---|---|
| Modelo | RMD-X4-10 |
| Relação de Transmissão | 12.6:1 |
| Tensão de Entrada | 24V DC |
| Velocidade Nominal | 238 RPM |
| Velocidade em Vazio | 317 RPM |
| Potência de Saída Nominal | 100W |
| Torque Nominal | 4N·m |
| Torque de Pico | 10N·m |
| Corrente Nominal | 7.84A |
| Corrente em vazio | 1A |
| Tipo de Encoder | Encoder Duplo (ABS-17bit / 18bit) |
| Comunicação | EtherCAT + CAN Bus |
| Peso | 0.33kg |
| Tamanho | Ø55mm × 55.5mm |
Aplicações
-
Robôs Humanoides – Atuadores para braços, pernas e torso
-
Atuadores de Perna Biónica – Alto torque com design anti-curvatura para corridas e saltos
-
Robôs Colaborativos – Controlo de movimento suave para automação industrial
-
Exoesqueletos – Atuadores leves e de alta dinâmica para dispositivos assistivos humanos
-
Linhas de Produção Flexíveis – Sincronização multi-eixo através de comunicação de alta velocidade EtherCAT
Embalagem & Acessórios
-
Fonte de Alimentação + Cabo de Comunicação CAN Bus ×1
-
Resistência Terminal de 120Ω ×1
Cabo de Comunicação EtherCAT ×2
-
Módulo de Comunicação CAN Bus ×1 (adaptador USB-CAN incluído por encomenda)
Dimensões da Embalagem: 100mm × 100mm × 70mm
Detalhes

RMD-X4-PT2.5-10-C atuador robótico de dupla codificação com entrada de 24V, relação de engrenagem de 12,6, torque de 4N·m e saída de 100W. Apresenta interface CAN BUS/EtherCAT, velocidade sem carga de 317RPM e peso de 0,28kg. Inclui dimensões de instalação e especificações técnicas.

Atuador planetário com torque de pico de 10N.m, relação de engrenagem de 12,6:1, peso de 0,33kg. Tamanho: Ø55mm×55,5mm. Apresenta comunicação EtherCAT/CANBUS, codificador duplo, MCU de alta velocidade, chips CAN e rolamentos de esferas de ranhura profunda.

Codificador Duplo ABS-17BIT Entrada / 18BIT Saída, X4-10, SN:40225621, MYACTUATOR

O Atuador Planetário RMD-X4-10 da MYACTUATOR oferece 100W de potência, 46Nm de torque, codificador duplo e velocidade de 238rpm. Vem com cabo de alimentação + cabo CAN BUS, resistor de 120Ω, cabo EtherCAT, módulo CAN BUS e adaptador USB-CAN gratuito.
O RMD-X4-10 Atuador Planetário Robótico possui um codificador duplo, 12.Relação de transmissão de 6, entrada de 24V, saída de 100W, e CAN BUS/EtherCAT. Fornece um torque de 4N.m, velocidade de 238 RPM, pesa 0.33kg, e utiliza rolamentos de esferas de ranho profundo para alta eficiência.

A interface X4-10 inclui portas de alimentação, CAN e EtherCAT. A embalagem contém fonte de alimentação, cabos, resistores e módulo. Dimensões: 100x100x70mm. Inclui adaptador USB-CAN com cada pedido.

Os acessórios X4-10 incluem fonte de alimentação, cabos CAN BUS e EtherCAT, resistência terminal, e um módulo CAN BUS. Os detalhes cobrem conectores, funções dos fios, linhas de sinal, e notas sobre o adaptador USB-CAN.
Related Collections






