





MyActuator RMD-X4-36 Atuador Planetário 34N·m Motor DC Brushless com Encoder Duplo, EtherCAT & CAN Bus, Relação de Transmissão 36:1
MyActuator RMD-X4-36 Atuador Planetário 34N·m Motor DC Brushless com Encoder Duplo, EtherCAT & CAN Bus, Relação de Transmissão 36:1
MyActuator
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Atuador Planetário RMD-X4-36 com Motor DC Sem Escovas é um atuador de alta performance projetado para sistemas de robótica e automação que requerem controle de movimento preciso, alta saída de torque e integração compacta. Com um torque de pico de 34N·m, relação de engrenagem de 36:1, e uma estrutura de rolamento de rolos cruzados, oferece excelente capacidade de resistência à flexão e durabilidade. Apresentando protocolos de comunicação dual EtherCAT + CAN e uma resposta ultra-rápida de 250μs, este atuador é ideal para robôs humanoides, braços robóticos, plataformas móveis e outras aplicações robóticas avançadas. O seu design de encoder duplo (entrada ABS de 17 bits / saída de 18 bits) garante uma precisão de posicionamento ultra-alta, enquanto o tamanho compacto (55mm × 61mm, 0.36kg) permite uma integração leve e eficiente.
Características Principais
-
Encoder Duplo de Alta Precisão: 17-bit (entrada) + 18-bit (saída) para uma precisão de 0.01°.
-
Protocolos EtherCAT + CAN Bus: Comunicação flexível com resposta ultra-rápida de 250μs.
-
Rolamentos de Rolo Cruzado: Desempenho superior contra flexão e longa vida útil.
-
Alta Densidade de Potência: Compacto com 55mm de diâmetro, 61mm de comprimento e apenas 0.36kg de peso.
-
Torque de Pico 34N·m e Torque Nominal 11.5N·m garantem um output de movimento estável e potente.
-
Alta Eficiência: Potência nominal de 100W com tecnologia FOC (Controle Orientado a Campo) suave.
-
Aplicação Versátil: Projetado para robôs humanoides, exoesqueletos, manipuladores e sistemas de automação.
Especificações
| Parâmetro | Valor |
|---|---|
| Modelo | RMD-X4-P36-36-C |
| Tensão de Entrada | 24V |
| Relação de Transmissão | 36:1 |
| Velocidade sem Carga | 111 RPM |
| Corrente sem Carga | 0.9 A |
| Velocidade Nominal | 83 RPM |
| Torque Nominal | 11.5 N·m |
| Potência de Saída Nominal | 100 W |
| Torque de Pico | 34 N·m |
| Corrente de Pico da Fase | 21.5 A (rms) |
| Pares de Polo | 13 |
| Tipo de Encoder | Encoder Duplo ABS 17-bit (Entrada) / 18-bit (Saída) |
| Protocolos de Comunicação | EtherCAT / CAN Bus |
| Tamanho | Ø55mm × 61mm |
| Peso | 0.36 kg |
Conteúdo da Embalagem
-
1 × Motor de Atuador Planetário RMD-X4-36
-
1 × Fonte de Alimentação + Cabo de Comunicação CAN Bus
-
1 × Resistência Terminal de 120Ω
-
2 × Cabos de Comunicação EtherCAT
-
1 × Módulo de Comunicação CAN Bus (adaptador USB-CAN)
Aplicações
-
Robôs humanoides e biónicos
-
Braços robóticos colaborativos
-
Exoesqueletos e robôs de reabilitação
-
Robôs de serviço e plataformas móveis
-
Sistemas de automação de precisão que requerem atuadores compactos e de alto torque
Detalhes

Atuador planetário com 34N.m torque de pico, relação de transmissão de 36:1, 0.Peso de 36kg, tamanho Ø55mm×61mm. Características de comunicação EtherCAT/CANBUS, encoder duplo, MCU de alta velocidade, chips CAN e rolamentos de rolos cruzados.

Motor RMD-X4-P36-36: 24V, torque de 10.5N.m, 83RPM, encoder duplo, EtherCAT+CAN BUS, relação de 36, 0.36kg, encoder ABS-17BIT/18BIT, dimensões detalhadas incluídas.

Motor X4-36, 100W, 12N.m, encoder duplo, entrada de 17BIT, saída de 18BIT, 63rpm, relação de 1:36, interface CAN bus, indicador LED.

Motor MYACTUATOR X4-36, 100W, 12N.m, encoder duplo, 83rpm, relação de 1:36. Inclui fonte de alimentação, cabo CAN BUS, resistor de 120Ω, cabos EtherCAT e módulo CAN BUS com adaptador USB-CAN gratuito.
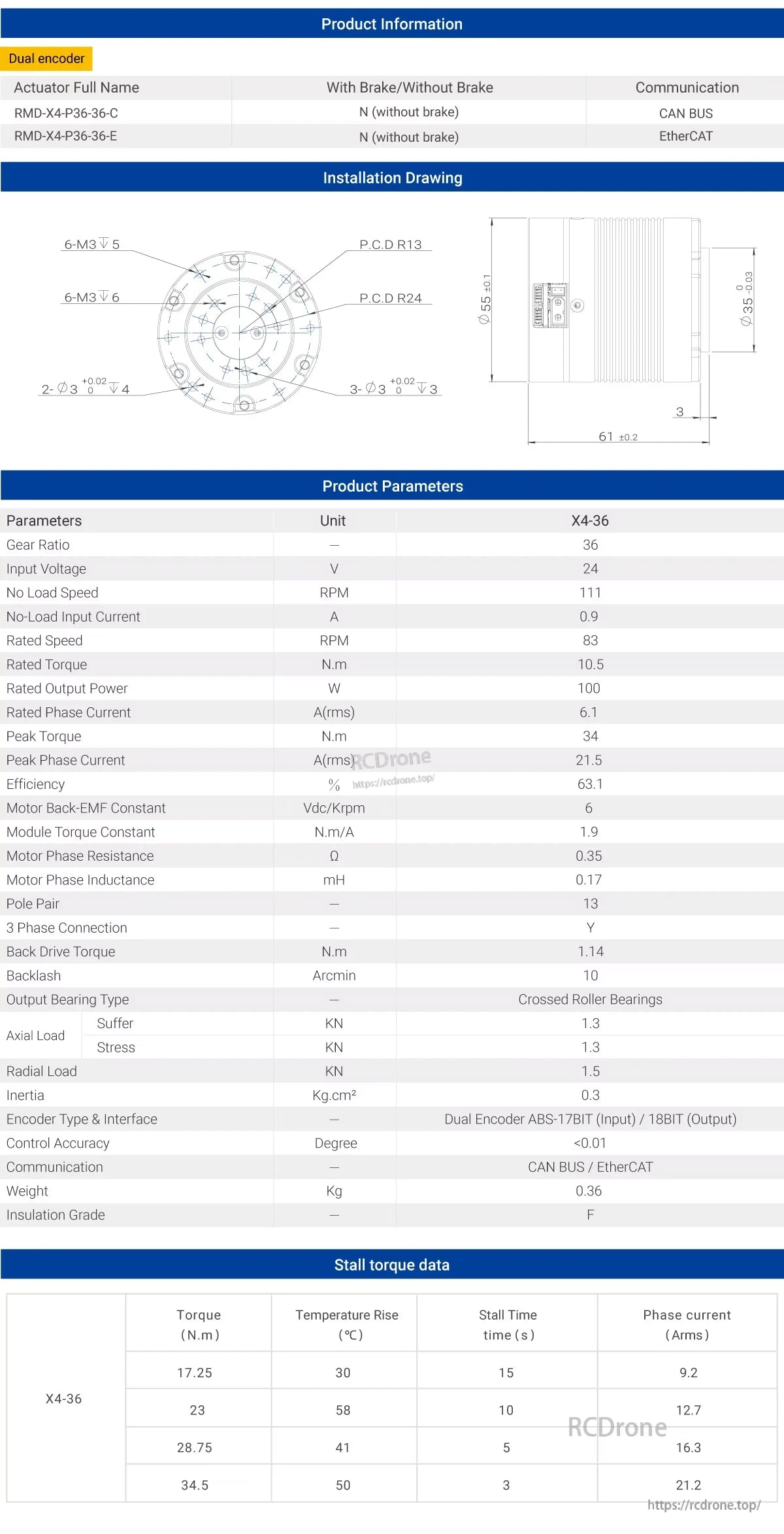
O motor RMD-X4-P36-36 possui encoder duplo, relação de 36, entrada de 24V, saída de 100W, CAN BUS/EtherCAT. Torque nominal: 10.5 N.m, velocidade: 83 RPM, peso: 0.36 kg. Os dados de torque de estol incluem torque, aumento de temperatura, tempo e valores de corrente de fase.

Os detalhes da interface incluem portas de alimentação, CAN e EtherCAT. A embalagem contém motor, cabos, resistores e módulos de comunicação. Dimensões: 100x100x70mm. Inclui adaptador USB-CAN.
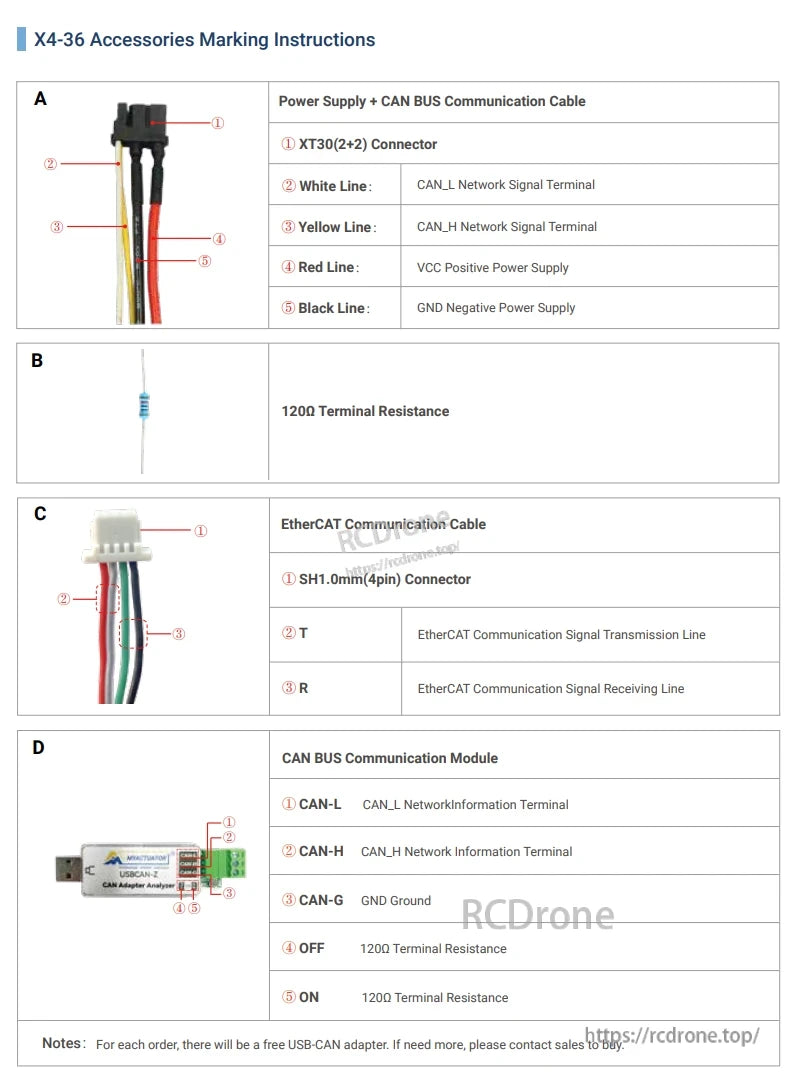
Os acessórios X4-36 incluem fonte de alimentação, cabos CAN BUS, EtherCAT, resistência de 120Ω e módulo CAN. Os detalhes abrangem conectores, cores dos fios, linhas de sinal e configurações de terminais para conexões de comunicação e alimentação. Adaptador USB-CAN incluído com cada pedido.
Related Collections





