





Atuador de Servo MyActuator RMD-X6-60 com Duplo Encoder 320W 20N·m 60N·m Pico 48V EtherCAT CAN BUS Motor de Junta Robótica de Alta Precisão
Atuador de Servo MyActuator RMD-X6-60 com Duplo Encoder 320W 20N·m 60N·m Pico 48V EtherCAT CAN BUS Motor de Junta Robótica de Alta Precisão
MyActuator
Não foi possível carregar a disponibilidade de recolha
Overview
O MyActuator RMD-X6-60 atuador servo inteligente é uma unidade de acionamento integrada compacta e de alto desempenho, projetada para aplicações de robótica, automação e controle de movimento de precisão. Equipado com interfaces de comunicação EtherCAT e CAN BUS e um sistema de encoder duplo, este atuador oferece alta densidade de torque, controle preciso e gestão de movimento em múltiplos modos. É ideal para juntas de robôs, braços robóticos, robôs móveis e sistemas de automação industrial que requerem alta precisão e fiabilidade.
Parâmetros Chave:
-
Potência Nominal: 320W
-
Torque Nominal: 20N·m
-
Torque de Pico: 60N·m
-
Velocidade Nominal: 153RPM
-
Relação de Transmissão: 19.612:1
-
Precisão do Encoder Duplo: 17bit de Entrada / 17bit de Saída
-
Protocolos de Comunicação: CAN BUS, EtherCAT
-
Tensão de Entrada: 48V
Principais Características
-
Design de Encoder Duplo
Encoders integrados de 17 bits de entrada e saída fornecem feedback preciso para controlo de movimento e monitorização de estado. -
Suporte a Múltiplos Protocolos
Interfaces EtherCAT e CAN BUS integradas garantem ampla compatibilidade com diferentes plataformas de controlo robótico e de automação. -
Alta Densidade de Potência e Torque
Capaz de fornecer 320W de potência contínua e 60N·m de torque de pico, atendendo às exigências de aplicações dinâmicas e de carga pesada. -
Modos de Controlo Híbrido
Suporta controlo híbrido de posição, velocidade e torque, permitindo sistemas de movimento avançados multi-eixos e coordenados. -
Feedback de Alta Precisão e Resposta Rápida
MCU de alta velocidade integrada e processadores CAN fornecem resposta a nível de milissegundos para controlo preciso. -
Design Compacto e Leve
Dimensões de 120mm × 120mm × 80mm e um peso de 0.82kg tornam-no ideal para aplicações robóticas leves onde o espaço e o peso são críticos.
Especificações Técnicas
| Parâmetro | Valor |
|---|---|
| Modelo | RMD-X6-P20-60-C |
| Tensão de Entrada | 48V |
| Potência Nominal | 320W |
| Torque Nominal | 20N·m |
| Torque de Pico | 60N·m |
| Velocidade Nominal | 153RPM |
| Velocidade Sem Carga | 176RPM |
| Corrente Nominal | 9.5A (RMS) |
| Corrente Sem Carga | 0.9A |
| Corrente de Pico | 29.1A (RMS) |
| Relação de Transmissão | 19.612:1 |
| Pares de Polo | 10 |
| Resolução do Encoder | Entrada: 17bit / Saída: 17bit |
| Peso | 0.82kg |
Descrição da Interface
Portas de Alimentação e Comunicação
| Porta | Descrição |
|---|---|
| EtherCAT_OUT | Porta de saída EtherCAT |
| EtherCAT_IN | Porta de entrada EtherCAT |
| CAN_L | Terminal de sinal CAN Baixo |
| CAN_H | Terminal de sinal CAN Alto |
| GND | Fonte de alimentação negativa |
| VCC | Fonte de alimentação positiva |
Terminais de Sinal
R+/R-: Dados de feedback do módulo para a estação mestre
-
T+/T-: Sinais de comando de controlo da estação mestre para o módulo
Dimensões e Estrutura
-
Diâmetro: 120mm
-
Altura: 80mm
-
Furos de Montagem: P.C.D R26.25 e R22 com 12 × furos roscados M4
-
Eixo de Saída: Interface de flange padrão para acoplamento flexível com componentes externos
Informação de Embalagem
| Itens Incluídos | Quantidade |
|---|---|
| Fonte de Alimentação + Cabo de Comunicação CAN BUS | 2 pcs |
| Cabo de Comunicação EtherCAT | 2 pcs |
| Resistência de Terminal de 120Ω | 1 pc |
| Módulo de Comunicação CAN BUS (Adaptador USB-CAN) | 1 pc |
Dimensões da Embalagem:
-
Comprimento × Largura × Altura: 120mm × 120mm × 80mm
Acessórios e Conexões
Fonte de Alimentação + Cabo CAN BUS
-
Conector: XT30 (2+2)
-
Linha Branca: sinal CAN_L
-
Linha Amarela: sinal CAN_H
-
Linha Vermelha: fonte de alimentação positiva VCC
-
Linha Preta: fonte de alimentação negativa GND
Cabo de Comunicação EtherCAT
-
Conector: SH1.0mm (4-pinos)
-
Linha T: Transmissão de sinal de comunicação EtherCAT
-
Linha R: Receção de sinal de comunicação EtherCAT
Módulo CAN BUS
-
Terminais: CAN_L, CAN_H, CAN_G, e terminação 120Ω ajustável (ON/OFF)
-
Adaptador USB-CAN fornecido gratuitamente com cada encomenda
Aplicações
-
Juntas de Robôs Colaborativos
-
Robôs de Serviço e Humanoides
-
Sistemas de Direção ou Movimento de Robôs Móveis
-
Braços Robóticos Industriais
-
Sistemas de Controlo de Movimento de Alta Precisão
Plataformas de Pesquisa e Educacionais
Resumo
O MyActuator RMD-X6-60 integra encoders duplos de alta precisão, protocolos de comunicação EtherCAT e CAN BUS, alta densidade de torque e um formato compacto, tornando-o uma solução versátil e fiável para robótica e automação industrial. Com a sua potência de 320W, torque máximo de 60N·m e feedback de alta resolução de 17 bits, este atuador servo oferece desempenho excepcional e precisão de controlo para projetos de robótica avançada.
Detalhes
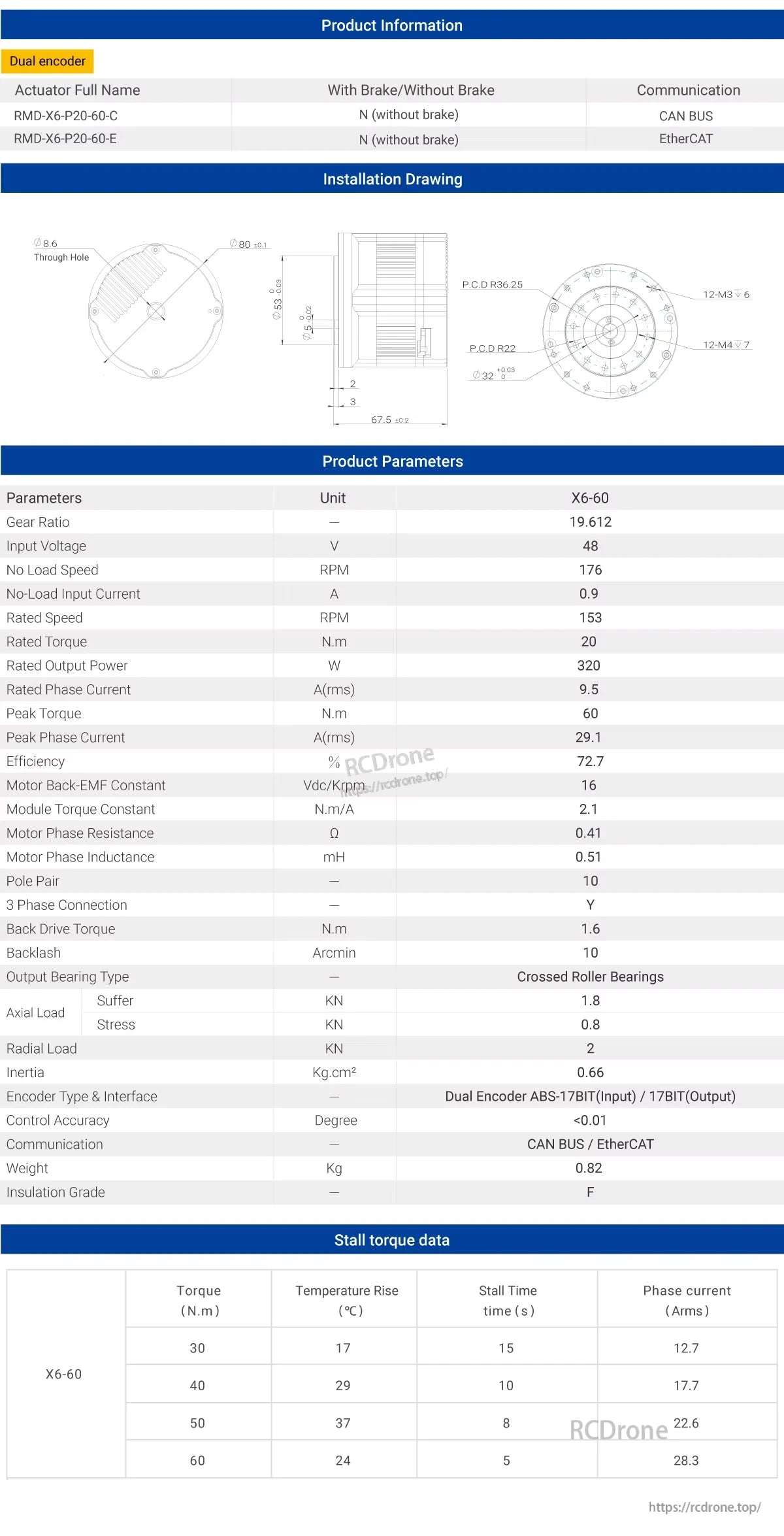
O atuador servo RMD-X6-60 tem um encoder duplo, uma relação de engrenagem de 19.612, entrada de 48V, potência de 320W, comunicação CAN BUS/EtherCAT, 20 N.mtorque nominal, 60 N.mtorque máximo, e pesa 0.82 kg.
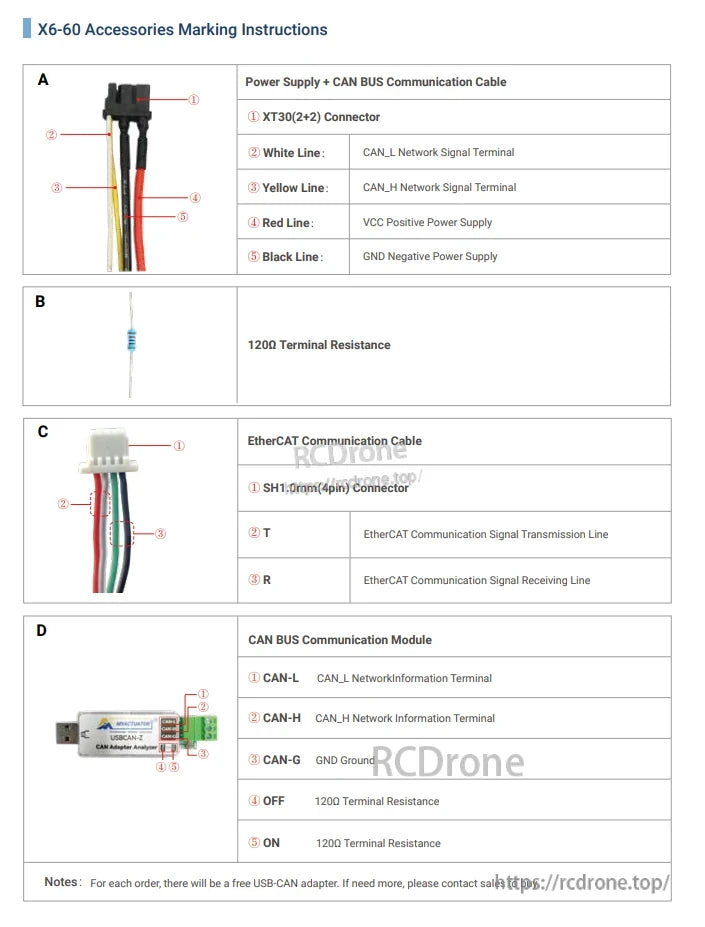
Os acessórios X6-60 incluem cabo de alimentação e CAN BUS com fios codificados por cores, resistência terminal de 120Ω, cabo EtherCAT com linhas T/R, e um módulo CAN BUS com terminais para CAN-L, CAN-H, GND, e configurações de resistência terminal. Um adaptador USB-CAN gratuito está incluído por pedido.

Atuador servo RMD-X6-P20-60-C com EtherCAT+CAN BUS, 19.612 relação, entrada de 48V, velocidade nominal de 153RPM, torque de 20Nm, saída de 320W, encoder duplo, MCU de alta velocidade e chip CAN, rolamento cruzado.
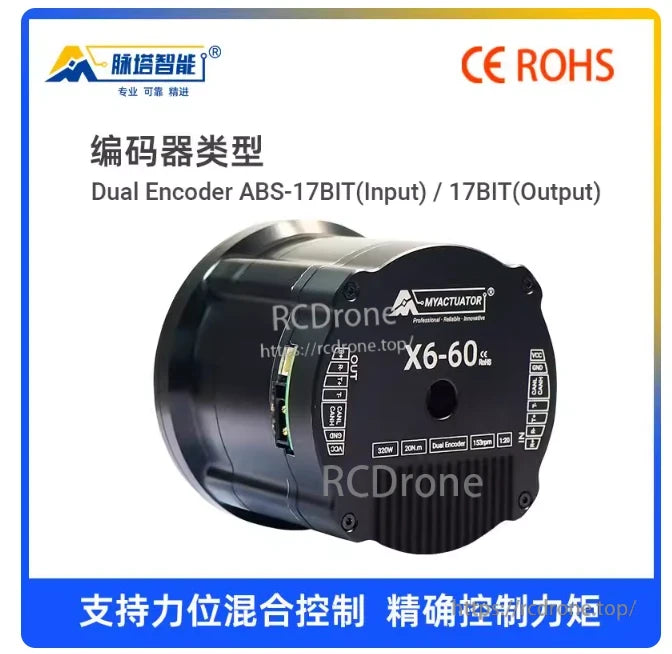
Encoder Duplo ABS-17BIT Entrada/Saída, Atuador Servo X6-60, 300W, 20N.m, 128rpm, suporta controlo híbrido de força e posição, controlo de torque preciso.
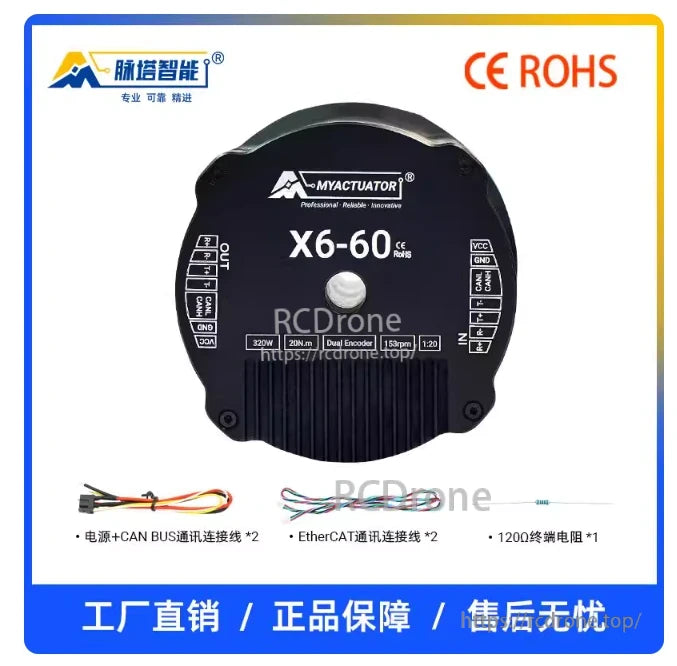
Atuador servo X6-60, 320W, 20N.m, encoder duplo, 158rpm, relação 1:20, com cabos CAN BUS e EtherCAT, terminador de 120Ω, certificado CE ROHS.

Embalagem do Atuador Servo RMD-X6-60 com fiação CAN BUS, cabo de alimentação e resistor de terminação de 1200.
Related Collections





