




Atuador de Motor Servo MyActuator RMD-X8-120 48V 574W 110N·m Binário Máx. Encoder Duplo EtherCAT CAN BUS para Robots e Braços Robóticos
Atuador de Motor Servo MyActuator RMD-X8-120 48V 574W 110N·m Binário Máx. Encoder Duplo EtherCAT CAN BUS para Robots e Braços Robóticos
MyActuator
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O motor servo MyActuator RMD-X8-120 integra uma caixa de engrenagens planetária, encoders duplos de 17 bits, e um controlador de acionamento de alto desempenho, oferecendo um torque poderoso e controle de movimento preciso. Com potência nominal de 574W, torque nominal de 43N·m, e até torque de pico de 110N·m, é ideal para robôs humanoides, braços robóticos, robôs quadrúpedes e outros sistemas de automação inteligente. Suportando protocolos CAN BUS e EtherCAT, garante uma integração perfeita com plataformas de robótica modernas.
Especificações Principais
| Parâmetro | Valor |
|---|---|
| Modelo | RMD-X8-P20-120-C |
| Relação de Engrenagem | 19.612:1 |
| Tensão | 48V |
| Velocidade sem carga | 158 RPM |
| Velocidade nominal | 127 RPM |
| Corrente sem carga | 1.6 A |
| Torque nominal | 43 N·m |
| Torque de pico | 110 N·m |
| Corrente de fase de pico | 43.8 A (rms) |
| Potência nominal | 574 W |
| Peso | 1.4 kg |
| Dimensões | Φ96 mm × 76 mm de altura |
| Tipo de Encoder | Encoder Duplo ABS-17BIT (Entrada) / 17BIT (Saída) |
| Comunicação | CAN BUS / EtherCAT |
Interface & Conectividade
-
EtherCAT IN/OUT para comunicação em tempo real de alta velocidade
-
CAN_H & CAN_L terminais para rede CAN BUS
-
VCC/GND para entrada de energia (48V)
-
Canais de sinal (T-/T+/R-/R+) para feedback de comando e status
Acessórios Incluídos
-
2× Fonte de Alimentação + cabos de comunicação CAN BUS
2× cabos de comunicação EtherCAT
-
1× resistor terminal de 120Ω
-
1× módulo de comunicação CAN BUS com adaptador USB-CAN
Principais Características
-
Controlo de Alta Precisão – Encoders absolutos de 17 bits permitem um controlo preciso de posição, velocidade e torque.
-
Saída de Alto Torque – Torque nominal 43N·m, pico 110N·m para cargas exigentes.
-
Design Integrado – Estrutura compacta com redutor planetário e módulo de acionamento para fácil instalação.
-
Suporte a Dois Protocolos – Compatível com CAN BUS e EtherCAT para integração flexível.
-
Construção Robusta – Rolamentos de rolos cruzados de alta resistência garantem durabilidade sob cargas pesadas.
Aplicações
-
Juntas de robô humanoide
-
Braços robóticos colaborativos
-
Robôs quadrúpedes e bípedes
-
Sistemas de exoesqueleto
-
Plataformas móveis autónomas
-
Automação industrial de alta precisão
Detalhes

O atuador servo M-RMD X8-120 oferece encoder duplo, entrada de 48V, 43 N.mtorque, 574W de potência, CAN BUS/EtherCAT, relação de engrenagem de 19.612, 10 pares de polos, peso de 1.40 kg e detalhes de torque de estol.
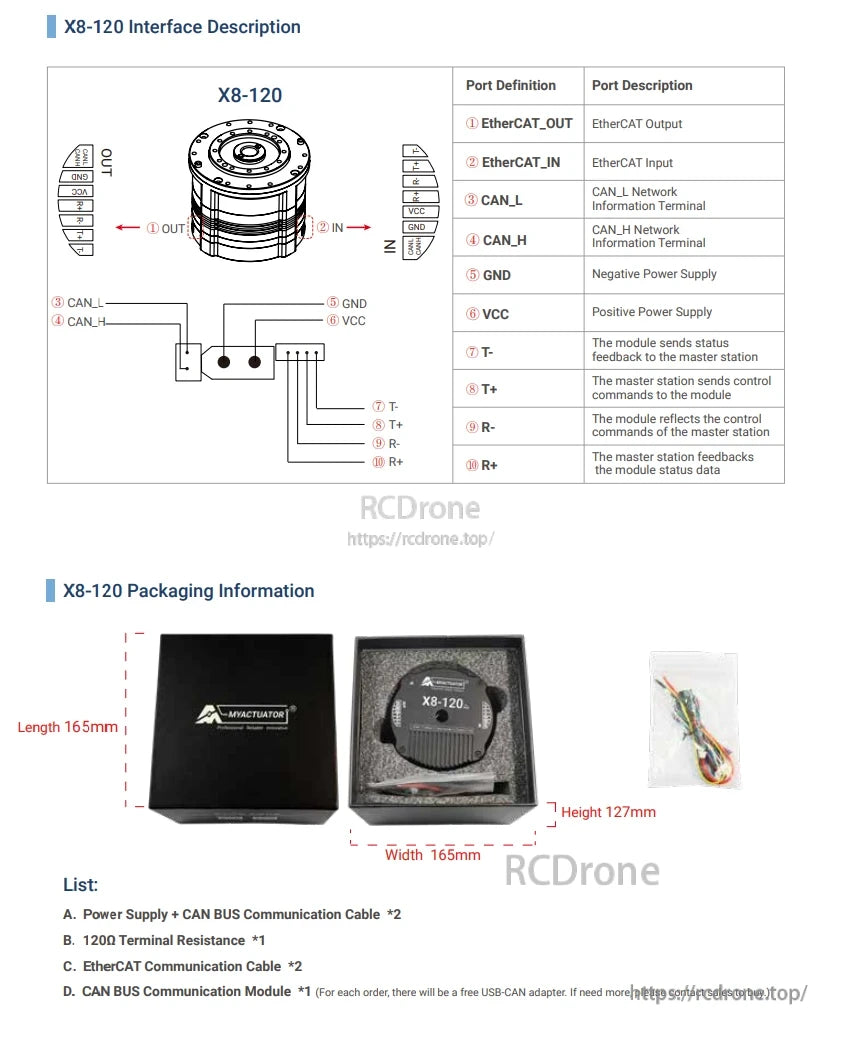
A interface servo X8-120 suporta EtherCAT e CAN bus, inclui conexões de potência e sinal, e adaptador USB-CAN. Embalagem: 165x165x127mm. Contém fonte de alimentação, cabos, resistência terminal e módulo de comunicação.

Os acessórios do MyActuator X8-120 incluem fonte de alimentação com cabo CAN BUS, resistência terminal de 120Ω, cabo EtherCAT e módulo CAN BUS. Os detalhes abrangem conectores, funções dos fios e terminais para comunicação e alimentação. Adaptador USB-CAN gratuito incluído por encomenda.

MyActuator motor de servo X8-120, 574W, 45N.m, encoder duplo, 127rpm, relação 1:20. Inclui cabos de alimentação+CAN BUS, cabos EtherCAT e terminador de 120Ω. Certificado CE ROHS.

Servo com encoder duplo EtherCAT + CAN BUS, modelo RMD-X8-P20-120-C, 48V, relação de redução de 19.612, 127RPM, torque de 43N.m, saída de 574W, peso de 1.4kg, apresentando MCU de alta velocidade, chip CAN e rolamentos de rolos cruzados.

Encoder Duplo ABS-17BIT Entrada/Saída, X8-120CL, suporta controlo híbrido de força e posição, controlo de torque preciso.

Servo MYACTUATOR X8-120 com cabos de alimentação, CAN BUS, EtherCAT e terminador de 120Ω. A embalagem inclui dois de cada linha de alimentação e comunicação.

Módulo de engrenagem planetária integrado, encoder duplo, comunicação EtherCAT/CAN, torque máximo de 120N.m, dimensões 96mm×76mm, para articulações robóticas.
Related Collections




