





Mão Robótica OYMotion ROH-AP001, 6 DOF, 11 articulações, sensores de força, UART/RS485/CAN, controlo PID, 0,7 s
Mão Robótica OYMotion ROH-AP001, 6 DOF, 11 articulações, sensores de força, UART/RS485/CAN, controlo PID, 0,7 s
OYMotion
Não foi possível carregar a disponibilidade de recolha
Visão Geral
A OYMotion ROH-AP001 Mão Dextróide é uma Mão Robótica com 11 articulações móveis e 6 motores integrados que proporcionam 6 graus de liberdade ativos. Um algoritmo de controlo de motor PID integrado permite uma apreensão e manipulação de objetos precisa e repetível. Cada dedo integra um sensor de força para monitorização em tempo real e controlo em malha fechada da força de aperto. As interfaces físicas incluem UART, RS485 ou CAN FD, com suporte para o protocolo serial SerialCtrl, ModBus-RTU e protocolo CAN. As plataformas ROS/ROS2 são suportadas para desenvolvimento secundário via SDK (acordo de licença necessário).
Principais Características
- 6 DOF ativos e 11 articulações; dedos motorizados de forma independente para um aperto natural.
- Drivers de motor integrados e controlo PID; toda a atuação integrada na mão.
- Sensores de força em cada dedo com feedback tátil e controlo de força em tempo real.
- Rotação do polegar motorizada mais design de dedos dobráveis.
- Operação por toque suportada nas pontas dos dedos.
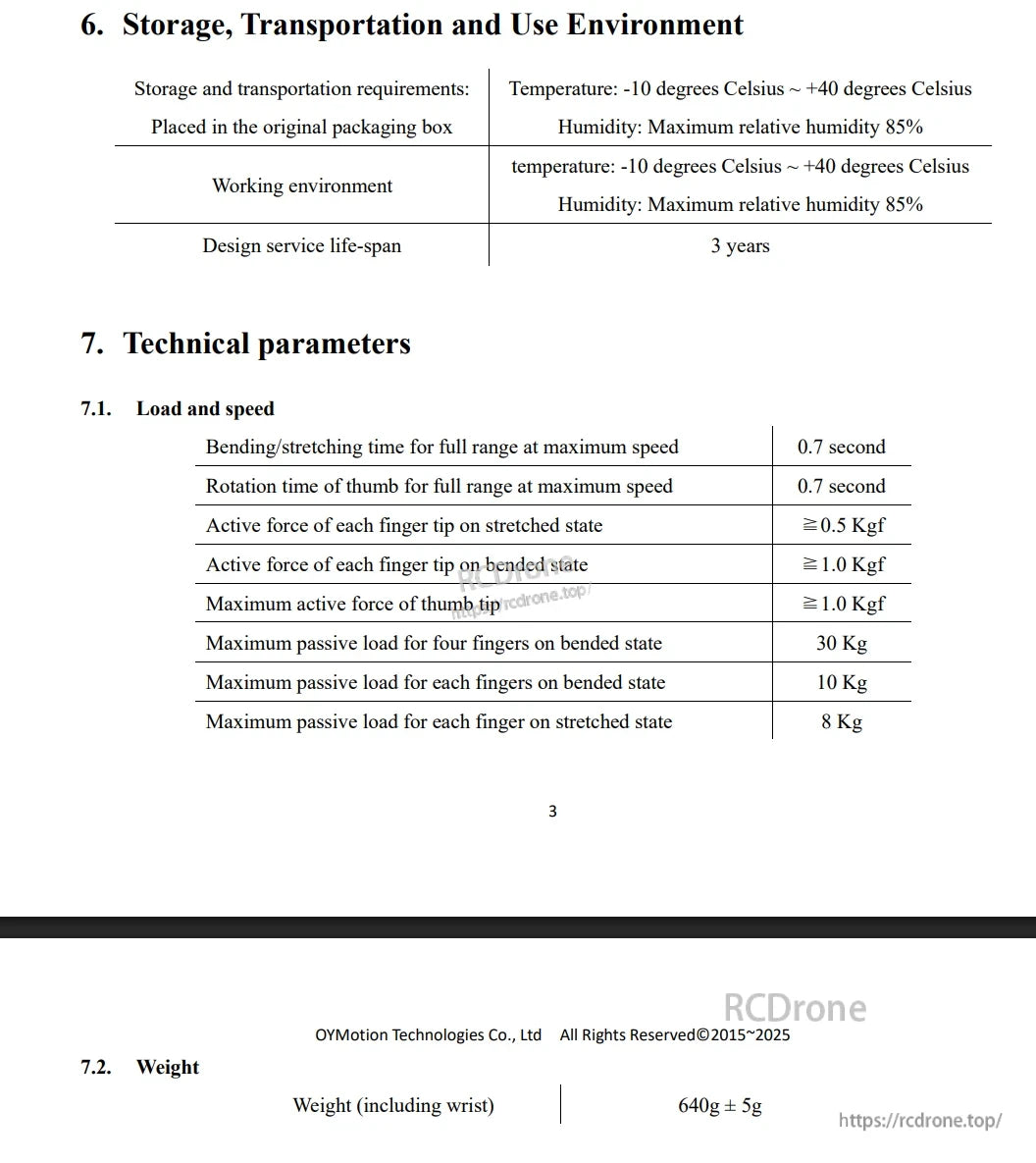
- Movimento rápido: 0,7 s para dobra/extensão de gama completa e 0,7 s para rotação de gama completa do polegar.
- Capacidade de carga: até 30 Kg de carga passiva para quatro dedos (dobrados), 10 Kg por dedo (dobrado), 8 Kg por dedo (esticado).
- Tamanho e proporções semelhantes aos humanos; almofadas de dedo macias e luva de silicone; design de pulso personalizado; sinalizador de mensagem.
- Interfaces e protocolos: UART/RS485/CAN com SerialCtrl e ModBus-RTU; CAN a 1M baud.
- Materiais evidenciados: liga de alumínio, liga de zinco, aço inoxidável, silicone, plástico.
Especificações
| DOF Ativo | 6 |
| Juntas móveis (articulações) | 11 |
| Distância vertical da ponta do dedo médio ao pulso | 183 mm |
| Distância vertical da ponta do polegar ao pulso | 95 mm |
| Comprimento do polegar | 111 mm |
| Largura máxima da palma | 82 mm |
| Diâmetro do pulso | 49 mm |
| Ângulo máximo de abertura e fechamento do lado do polegar | 0~31 ° |
| Ângulo máximo de abertura e fechamento do polegar à palma | 0~50 ° |
| Ângulo de rotação lateral do polegar | 0~90 ° |
| Tempo de flexão/extensão para toda a gama na velocidade máxima | 0.7 segundos |
| Tempo de rotação do polegar para a gama completa à velocidade máxima | 0.7 segundos |
| Força ativa de cada ponta de dedo em estado esticado | ≥0.5 Kgf |
| Força ativa de cada ponta de dedo em estado dobrado | ≥1.0 Kgf |
| Força ativa máxima da ponta do polegar | ≥1.0 Kgf |
| Carga passiva máxima para quatro dedos em estado dobrado | 30 Kg |
| Carga passiva máxima para cada dedo em estado dobrado | 10 Kg |
| Carga passiva máxima para cada dedo em estado esticado | 8 Kg |
| Função de toque do dedo na tela | Suportado |
| Feedback de força do dedo | Suportado |
| Temperatura do ambiente de trabalho | -10 °C ~ +40 °C |
| Humidade do ambiente de trabalho | Humidade relativa máxima 85% |
| Vida útil de design | 3 anos |
| Peso (incluindo pulso) | 640 g ± 5 g |
| Interface de Comunicação | UART/RS485/CAN |
| Taxa de Baud | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Protocolos Suportados | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Materiais | Liga de alumínio; liga de zinco; aço inoxidável; silicone; plástico |
Aplicações
- Efetores finais robóticos e robôs humanoides.
- Equipamento educativo e de pesquisa.
- Próteses biónicas.
- Automação industrial e sistemas AGV.
Para assistência na encomenda, orientação de integração ou suporte técnico, por favor contacte [email protected] or visite https://rcdrone.top/.
Manuais
Detalhes

O ROHand oferece uma precisão de posicionamento de ±1mm através de controlo de motor PID incorporado e oferece seis graus de liberdade ativos para simular movimentos da mão humana, como pinçar e agarrar. Ideal para robôs humanoides, efetores finais robóticos, sistemas de inspeção, próteses biónicas inteligentes e aplicações educativas ou de pesquisa, o seu design suporta manipulação versátil e precisa em tarefas complexas.
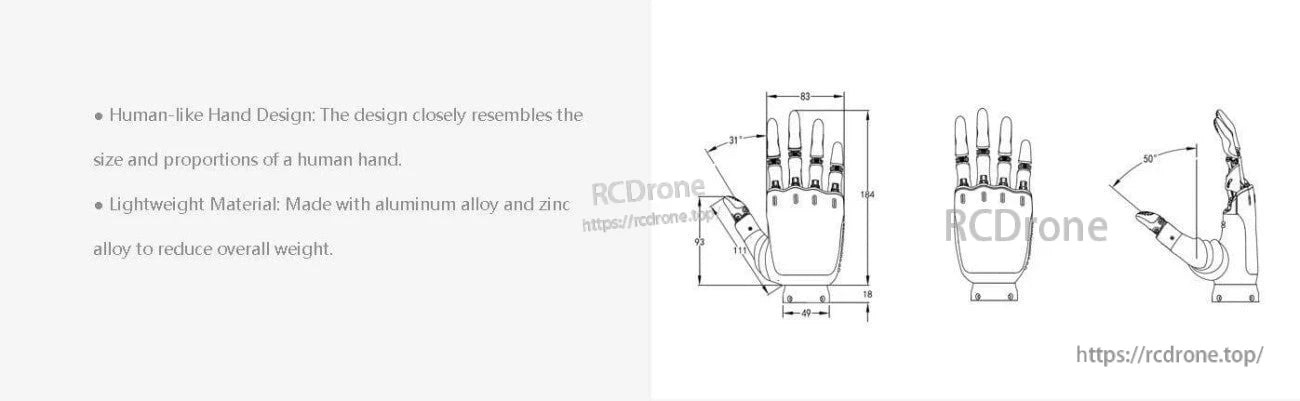
Mão robótica destroçada semelhante à humana, com construção em liga de alumínio e zinco leve e dimensões precisas.

A mão robótica dexterosa OYMotion ROH-AP001 imita as proporções humanas, apresentando dedos articulados e sensores para manipulação robótica precisa e em tamanho real.
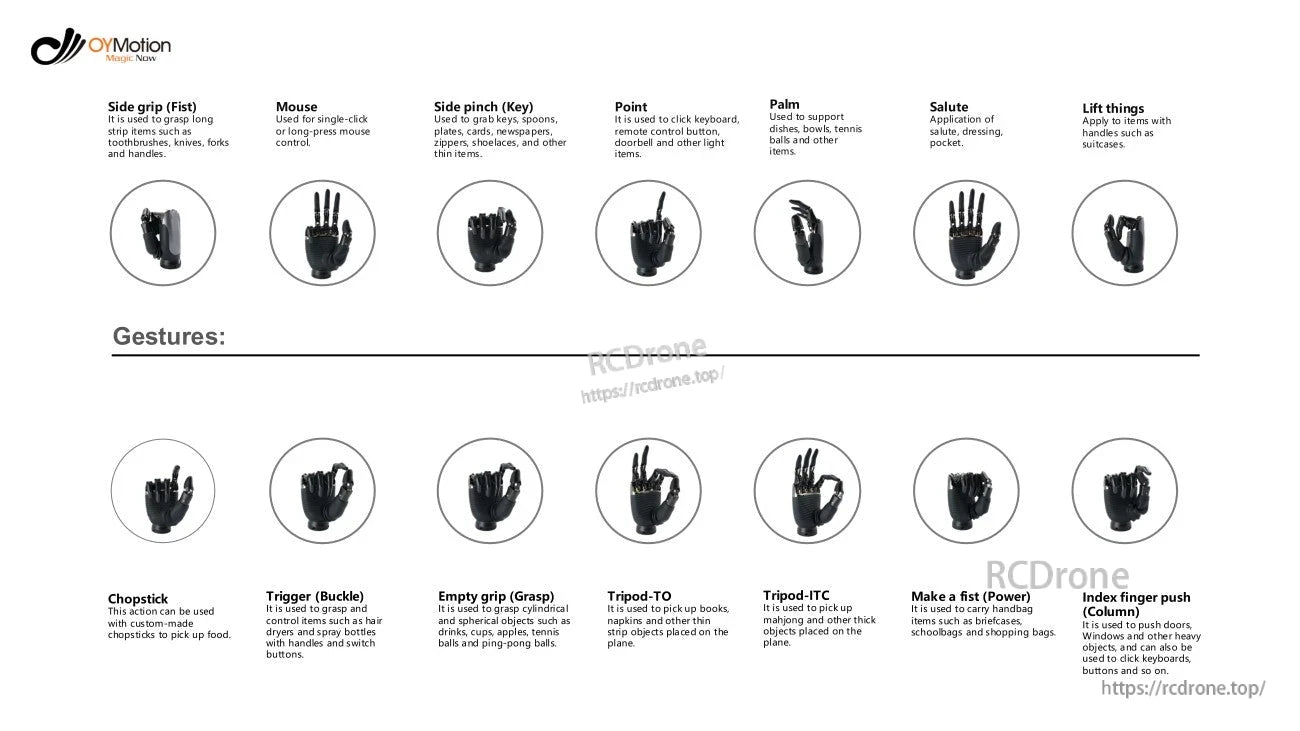
A mão robótica OYMotion realiza 14 gestos precisos—como agarrar, apontar e levantar—para lidar com tarefas diárias, como usar pauzinhos, transportar sacolas ou clicar em teclados, demonstrando destreza avançada e utilidade prática.

A mão robótica OYMotion oferece dedos motorizados, design dobrável, almofadas macias, polegar motorizado, luva de silicone, atuação embutida, apito, pulso personalizado e conector RS485 para um agarre natural e dexteroso.
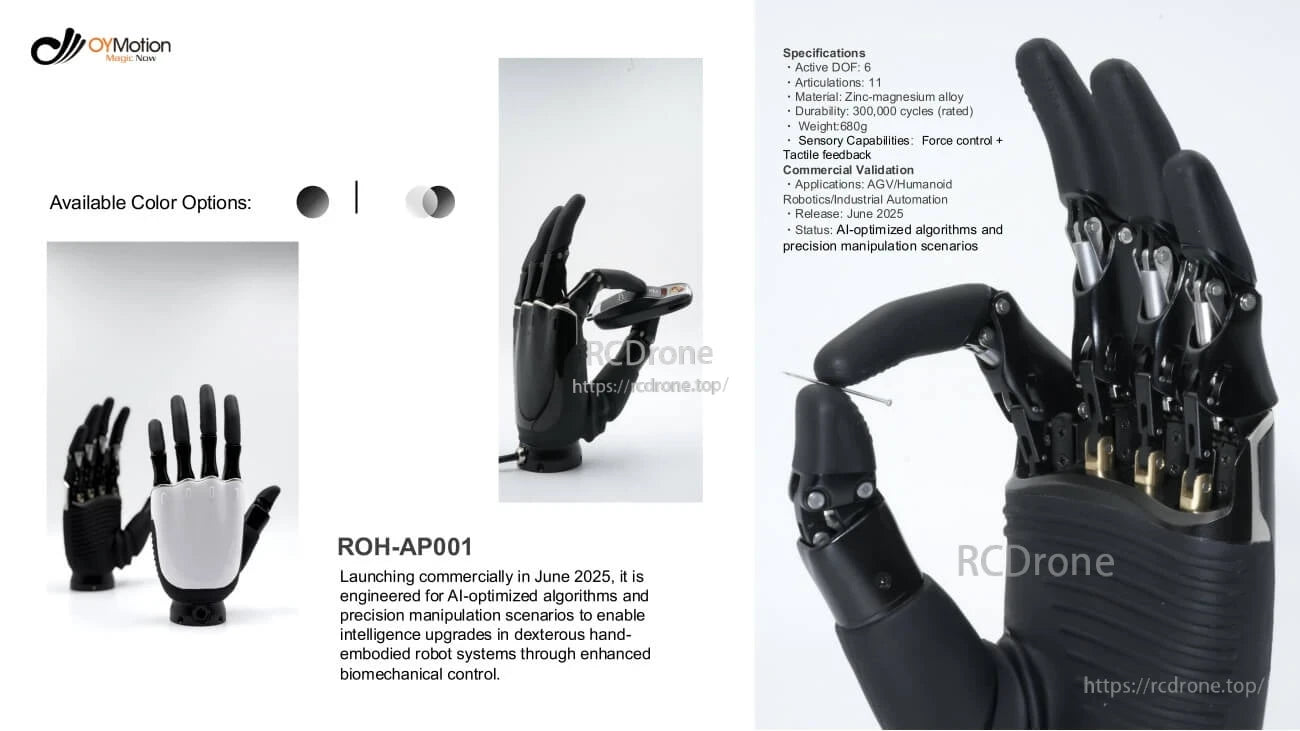
A mão robótica dexterosa OYMotion ROH-AP001 possui 6 DOF ativos, 11 articulações, construção em liga de zinco e magnésio, durabilidade de 300k ciclos, pesa 680g e oferece feedback de força/tátil para tarefas de IA e precisão—lançamento em junho de 2025.

A mão robótica OYMotion ROH-AP001 possui dedos motorizados, um polegar acionado, luva de silicone e atuação embutida. Construída a partir de alumínio, zinco, aço, silicone e plástico, inclui um sinalizador, pulso personalizado, protocolo RS485, design dobrável e molas de pressão.
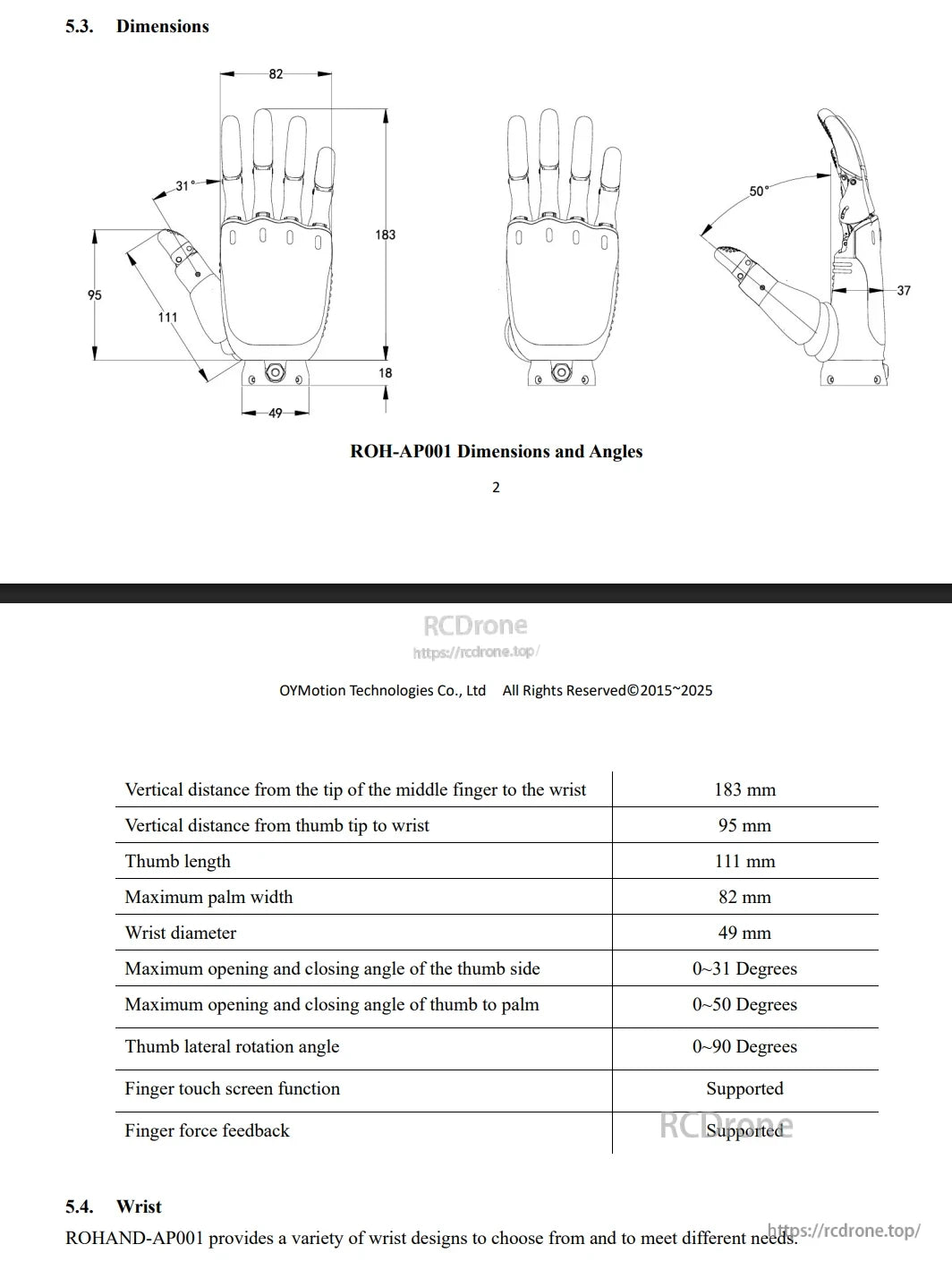
As dimensões da mão robótica ROH-AP001 incluem 183mm de altura do dedo ao pulso, 95mm do polegar ao pulso, 111mm de comprimento do polegar, 82mm de largura da palma, 49mm de diâmetro do pulso. Ângulos do polegar: 0-31° lateral, 0-50° em relação à palma, 0-90° de rotação. Suporta tela sensível ao toque e feedback de força.
A mão robótica OYMotion ROH-AP001 opera entre -10°C a +40°C, com 85% de umidade máxima. Vida útil do design: 3 anos. Peso: 640g ±5g. Força ativa do dedo ≥0.5–1.0 Kgf; carga passiva de até 30kg para quatro dedos.
Related Collections





