ESPECIFICAÇÕES do controlador de voo Pixhawk 2.4.8 PX4 PIX de 32 bits
Uso: Veículos e brinquedos de controle remoto
Atualizar peças/acessórios: Quadro
Suprimentos de ferramentas: Retificado
Parâmetros técnicos: Valor 3
Periféricos/dispositivos de controle remoto: Controle remoto
Idade recomendada: 12+a,14+a
Peças e acessórios RC: Controladores de velocidade
Origem: China Continental
Número do modelo: Pixhawk 2.4.8
Material: Metal
Atributos de tração nas quatro rodas: Motores
Para tipo de veículo: Aviões
Marca: Readytosky
ReadyToSky é um fornecedor profissional de acessórios para módulos FPV RC. Se você estiver interessado em saber mais sobre as opções de compra no atacado ou em grandes quantidades, sinta-se à vontade para entrar em contato conosco.
Recursos:
Pixhawk 2.4.8 suporta o firmware ardupilot oficial mais recente e o firmware PX4.
1. Os avançados processadores ARM CortexM4 de 32 bits de alto desempenho (flash de 2 MB) podem executar o sistema operacional NuttX RTOS em tempo real;
2. 14 saída PWM/servo;
3. Interface de barramento (UART, I2C, SPI, CAN);
4. A energia de backup integrada e o controlador de backup falham, o controlador primário faz failover para que o controle de backup seja seguro;
5. Fornece modos automáticos e manuais;
6. Fornece entrada de energia redundante e failover;
7. Luzes LED multicoloridas;
8. Fornece interface de campainha multitons
9. Gravação de dados de voo em Micro SD;
Especificações:
Interface
UART 1, 2 compatível com alta tensão de 1,5 com controle de fluxo de hardware
2. 2 PODE
3. Entrada compatível com receptor de satélite Spektrum DSM / DSM2 / DSM-X
4.Entradas e saídas compatíveis com Futaba SBUS
Entrada de sinal 5.PPM
6.Entrada RSSI (PWM ou tensão)
7.I2C
8.SPI
Entrada 9.3.3 e 6.6VADC
10. Interface MICRO USB externa
Display Pixhawk OSD OLED para Pixhawk 2.4.8 PIX PX4 Controle de voo Exibição de voo Status do voo conectado à interface I2C
É adequado para controle de vôo de Pixhawk, etc. e é usado para exibir as informações de status da aeronave. Este módulo está conectado à interface I2C do Pixhawk
Observação: para atualizar o firmware do monitor para 3.5 ou mais, defina NTF_DISPLAY_TYPE como 1 no Massion Planner e reinicie o Pixhawk.
COMO usar o Módulo WIFI para PIXHAWK?
1.Como conectar?
use a linha 6P para se conectar ao controlador de vôo pixhawk.
Devido ao firmware diferente, alguns firmwares podem usar duas portas, alguns firmwares só podem usar uma das portas. Portanto, encontre uma das portas disponíveis para a conexão.
SE você usar firmware PX4, somente TELEM1 poderá ser usado, não poderá usar TELEM2.
Para firmware Ardupilot, é recomendado usar a porta TELEM2. Ou encontre uma das portas disponíveis para a conexão.
Para firmware PX4, deve-se usar a porta TELEM1.
2.Como usar?
Observação: ao usar a conexão de telemetria de rádio Wifi, ele deve usar o módulo de alimentação 3DR ou 5V ESC para fornecer energia ao controle de vôo. O USB não pode ser inserido porque a prioridade do USB é maior que a Telemetria de Rádio. Se o cabo USB estiver conectado, ele não poderá ser usado para transmissão de radiotelemetria.
O nome do ponto de acesso Wi-Fi é Drone, então use um telefone ou computador para se conectar a este ponto de acesso. A senha é 12345678.
Observação:Alguns dispositivos (por exemplo, alguns sistemas IOS do iPhone) não podem obter IP automaticamente, você deve definir manualmente.
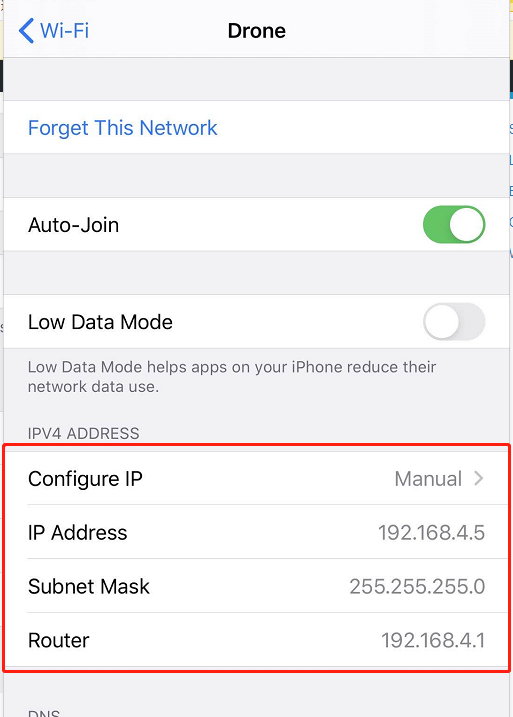
Defina Configurar IP como Manual. Defina o endereço IP como “192.168.4.5” ou outro, mas não pode definir como “192.168.4.1″, o último número não pode exceder 254. Defina a máscara de sub-rede como “255.255.255.0” (deve definir este valor, não pode outro). Defina o roteador como “192.168.4.1” (deve definir este valor, não pode outro)
Quando seu dispositivo se conectar a este ponto de acesso com sucesso, você poderá usar o navegador para visitar http://192.168.4.1 , você poderá modificar o parâmetro.
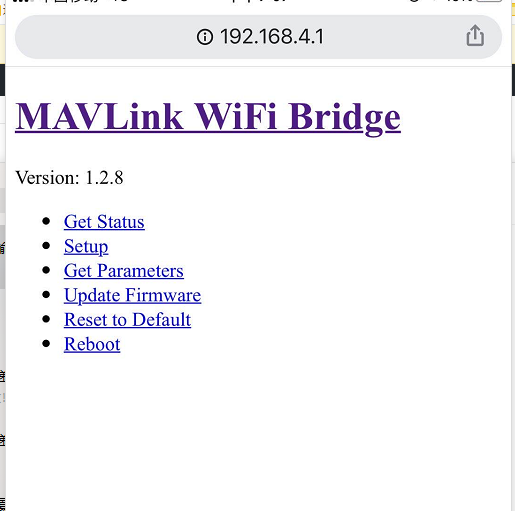
Observe que o botão é o botão de reinicialização, não o botão de reinicialização, ao pressionar o botão, todos os parâmetros serão definidos como padrão se você modificar algum parâmetro.
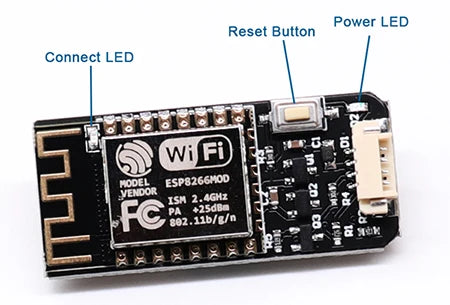
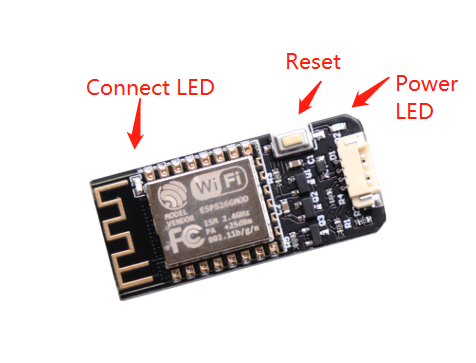
LED de energia: quando ligado, o LED vermelho fica aceso.
LED de conexão: quando conectado com controle de solo (por exemplo, Mission Planner ou Qgroundcontrol) com sucesso, o LED azul pisca. quando desconectado do controle de solo, o LED azul acende.
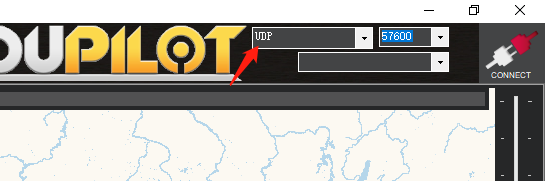
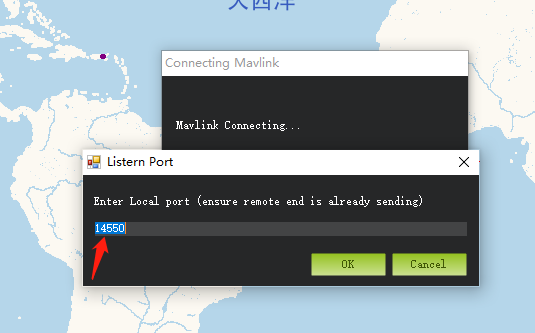
1.Como usar o planejador de missão?
Primeiro, conecte seu PC ao hotspot Drone com sucesso. Selecione UDP. Em seguida, clique no botão “Conectar” e use a porta 14550. Clique em “Ok”. Não há necessidade de escolher a taxa de transmissão. A taxa de transmissão padrão do módulo Wi-Fi é 57.600. Mas 115.200 ou outra também pode funcionar.
2.Como usar para telefone
Para Android: Baixe qgroundcontrol (somente para pixhawk, não para APM)
daqui,http://qgroundcontrol.com/downloads/
Baixe o DroidPlanner aqui,https://github.com/DroidPlanner/Tower/releases
Para iphone (IOS): pesquise qgroundcontrol na app store.
qgroundcontrol (somente para pixhawk, não para APM) pode se conectar automaticamente, o DroidPlanner deve escolher a porta “UDP” e “14550” antes de conectar ao groundcontrol.
WIFI V3.0 usa CPU de 32 bits, suporta TCP e UDP
Site WIFI V3.0 DroneBridge
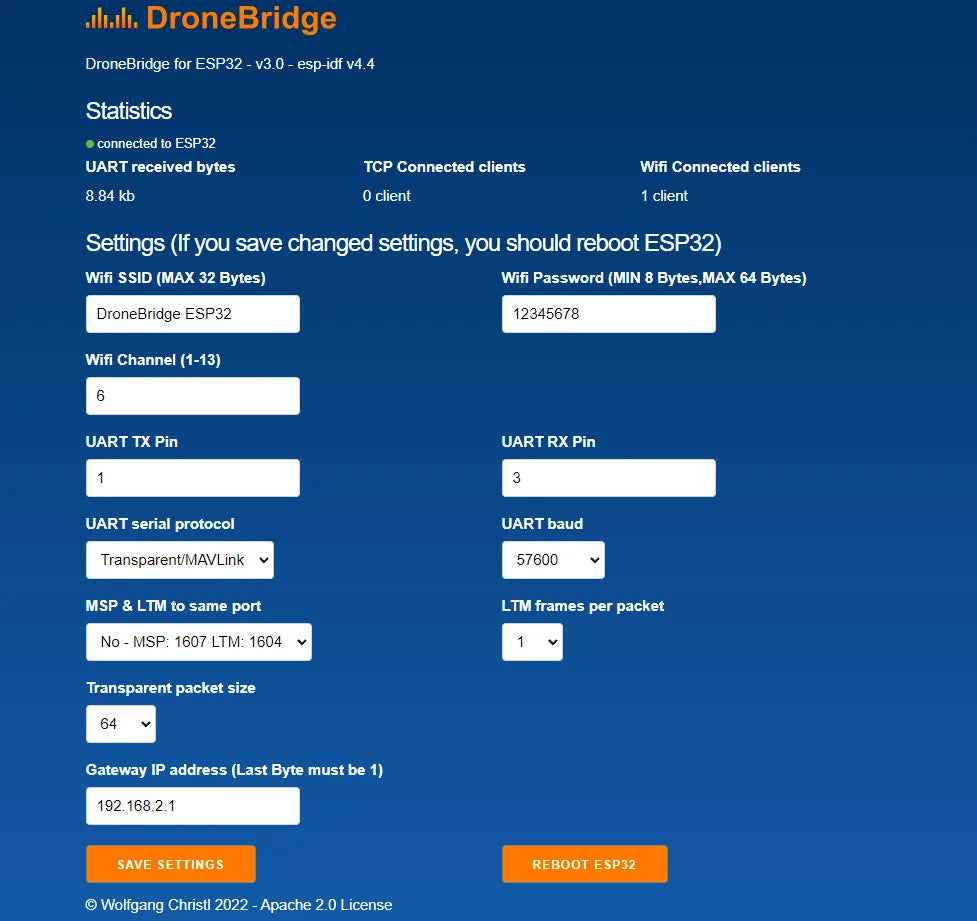
ulul; DroneBridge para ESP32 v3.0 esp idf v4.4 Estatística conectada ao ESP 32 UART recebeu bytes TCP Clientes conectados Senha Wifi (MIN 8 Bytes,MAX 64 Bytes) se você salvar as configurações alteradas, você deve reiniciar o ESP33.
(envie conforme sua escolha)

Pixhawk 2.4.8 FC + 4G TF Cartão + MBN GPS Suporte GPS + OSD + Módulo de potência Amortecedor I2C PPM RGB Botão de segurança Buzzer Wifi Fios de telemetria Ontk 'Módulo GPs PPM 1'

O pacote inclui: Pixhawk 2.4.8 controlador de vôo, cartão 4G TF, amortecedor, módulo I2C, módulo PPM, módulo RGB, display OLED, botão de segurança com campainha e fios para todos os componentes.
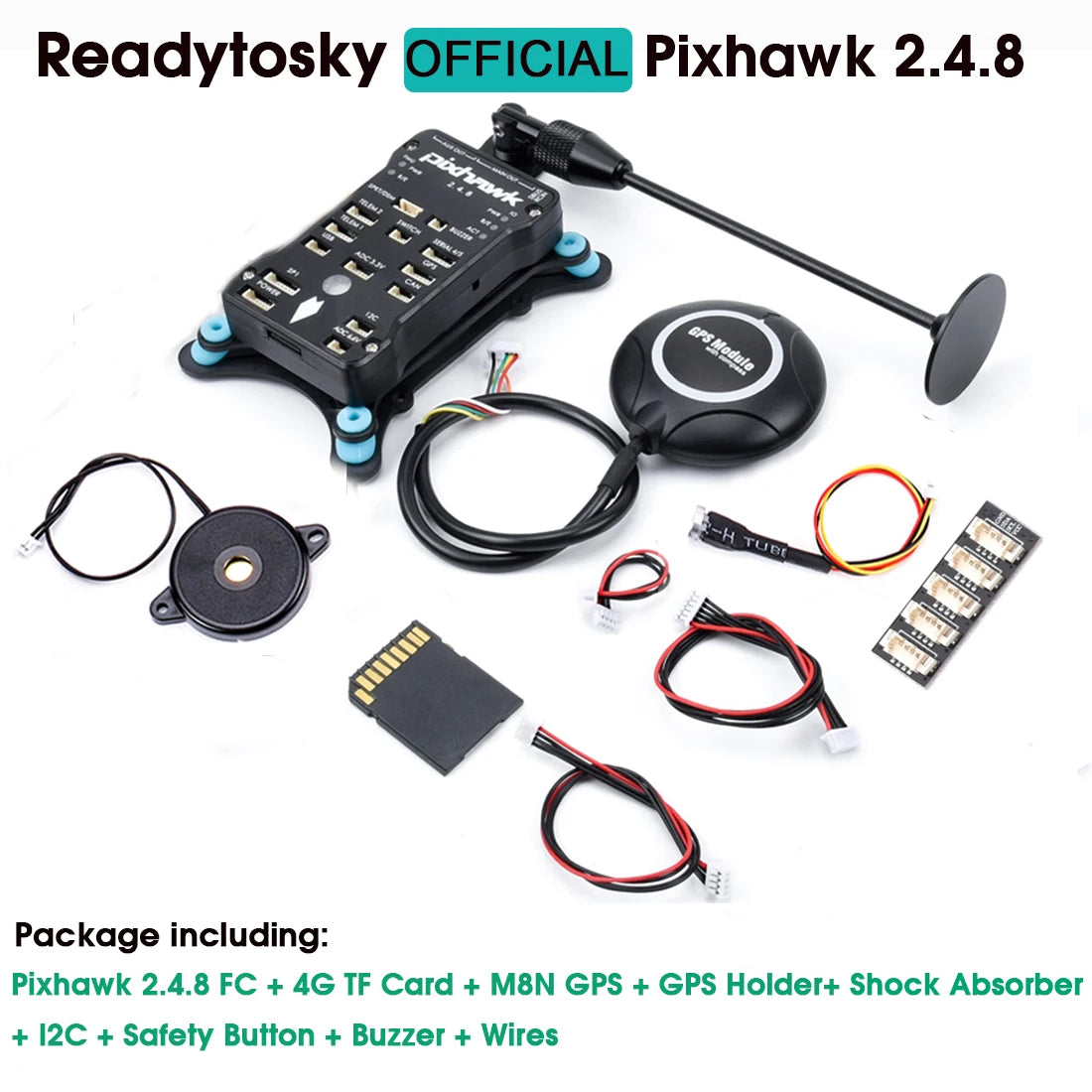
O pacote inclui: Pixhawk 2.4. 8, um cartão 4G TF, módulo GPS MBN, suporte GPS, amortecedor, botão de segurança I2C, fios de campainha e um módulo de telemetria opcional para transmissão de dados sem fio.

O pacote inclui: Pixhawk Controlador de vôo 2.4.8, cartão 4G TF, amortecedor, display OLED, módulo I²C, módulo PPM (modulação de posição de pulso), botão de segurança com campainha e fios.

Este vôo Pixhawk 2.4.8 O controlador vem com cartão 4G TF, botão de segurança, campainha e fios para saídas auxiliares. Ele também possui um módulo TELEM com duas entradas de energia, uma porta serial e canais ADC (conversor analógico-digital). Além disso, ele possui recursos de GPS e requer energia para funcionar.

A calibração de VCC, GPS e cartão SD é necessária no modo 'Estabilizado' com uma voltagem de bateria de 11,32V. Além disso, não há dados de GPS disponíveis. O pré-arme foi arquivado e o EKF (Filtro de Kalman Estendido) está ativado.