Observação:
O PIXHAWK 2.4.8 suporta o firmware mais recente do FMUV3 ardupilot e do PX4.
1. Você pode selecionar o shell branco ou preto do controlador de voo PIXHAWK, o hardware é o mesmo. O shell branco é mais bonito. Se você precisar do shell branco, deixe uma mensagem.
2.Se o pacote tiver Módulo de energia 3DR, por padrão enviaremos o módulo de energia 3DR plug XT60, se você precisar dele, deixe uma mensagem.
3. A Pixhawk tem muitos pacotes. Enviaremos o pacote conforme você selecionar.
Pixhawk PX4 Autopilot PIX 2.4.8 Controlador de voo de 32 bits
Características:
O Pixhawk 2.4.8 suporta o firmware oficial mais recente do ardupilot e o firmware PX4.
1. Os avançados processadores ARM CortexM4 de alto desempenho de 32 bits (flash de 2 MB) podem executar o sistema operacional NuttX RTOS em tempo real;
2. 14 PWM / saída servo;
3. Interface de barramento (UART, I2C, SPI, CAN);
4. A energia de backup integrada e o controlador de backup falham, o controlador primário falha para que o controle de backup esteja seguro;
5. Fornecer modos automático e manual;
6. Fornecer entrada de energia redundante e failover;
7. Luzes LED multicoloridas;
8. Fornecer interface de campainha multitom
9. Gravação de dados de voo em Micro SD;
Especificações:
Interface
1.5 UART 1, 2 compatível com alta tensão com controle de fluxo de hardware
2. 2 PODE
3. Entrada compatível com receptor de satélite Spektrum DSM / DSM2 / DSM-X
4. Entradas e saídas compatíveis com Futaba SBUS
5. Entrada de sinal PPM
6. RSSI (PWM ou tensão) Entrada
7.I2C
8.SPI
Entrada 9.3.3 e 6.6VADC
10.Interface MICRO USB externa
Módulo GPS M9N
O M9N é um módulo GPS comumente utilizado em veículos aéreos não tripulados, com as seguintes características e aplicações:
Posicionamento de alta precisão: O M9N adota tecnologia GNSS avançada, suporta múltiplos sistemas de navegação por satélite e pode fornecer informações de posicionamento de posição de alta precisão. Para veículos aéreos não tripulados, ele pode obter posicionamento e navegação precisos.
Suporte a vários sistemas: O M9N suporta vários sistemas de navegação por satélite, incluindo GPS, GLONASS, Galileo, BeiDou, etc. Isso permite que os drones recebam vários sinais de satélite simultaneamente, melhorando a precisão e a confiabilidade do posicionamento.
Posicionamento rápido: o M9N tem tempos rápidos de partida a frio e partida a quente, o que pode obter rapidamente sinais de satélite e executar o posicionamento, o que o torna crucial para a rápida decolagem e execução de tarefas de veículos aéreos não tripulados.
Forte capacidade antiinterferência: o M9N tem excelente desempenho antiinterferência, podendo funcionar de forma estável em ambientes eletromagnéticos complexos e não é suscetível à interferência de outros dispositivos eletrônicos.
Em aplicações de drones, o M9N pode ser usado nos seguintes aspectos:
Posicionamento e navegação: O M9N fornece informações precisas de posição e velocidade para ajudar os drones a obter navegação e controle de voo precisos.
Navegação de waypoints: Ao inserir informações de waypoints predefinidas no M9N, veículos aéreos não tripulados podem voar automaticamente de acordo com a rota, realizando tarefas autônomas de navegação de waypoints.
Colaboração entre várias aeronaves: vários drones podem usar o módulo M9N para posicionamento e sincronização para atingir aplicações como voo colaborativo em equipe e voo em formação.
Retorno a retorno: O M9N pode fornecer informações precisas de posicionamento de retorno, permitindo que o drone retorne com segurança ao ponto de decolagem ou ao ponto de retorno predefinido.
O M9N pode procurar mais satélites ao ar livre com maior precisão, maior velocidade de busca e melhor estabilidade. (O número específico de buscas de estrelas é determinado pelo ambiente naquele momento.)
Detalhes do Pixhawk PX4 com GPS M9N
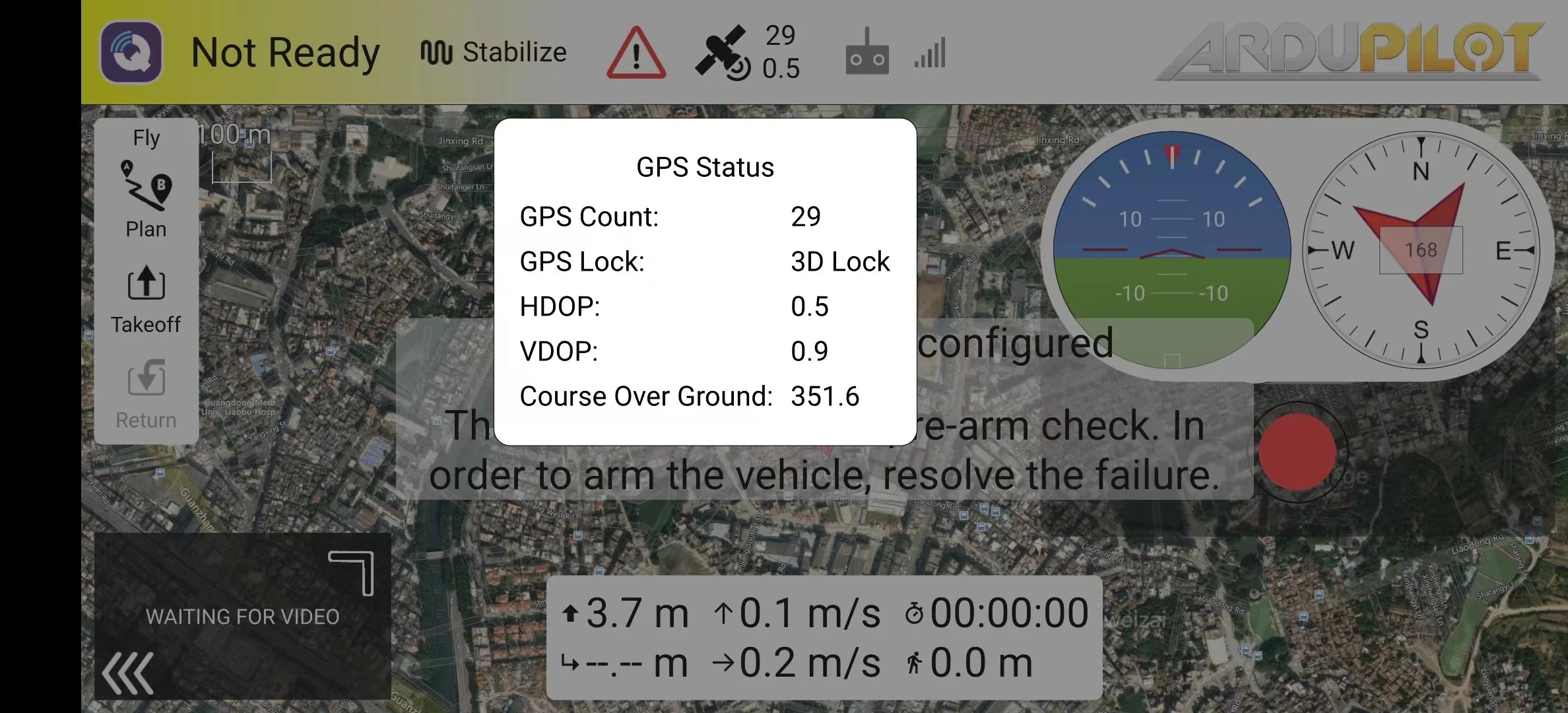
Não pronto para piloto automático. Estabilizar 2,5 ARDUINO Fly Road Linxing Road Status do GPS: Shuitangshan, Lr Contagem do GPS: 29/10/10 Plano W-168. Bloqueio do GPS: Bloqueio 3D de 10 graus. HDOP: 0,5. VDOP de decolagem: 0,9. Configurado para navegação em Guangdong Mile. Curso sobre o solo: 351,6. Hospital Universitário de Liaobu Retornar ao caminho, Verificar: Aguardando vídeo. Visando armar o veículo, resolver a falha.