Pixhawk px4 pro pix 32 bits controlador de vôo piloto automático-com 4g sd rc quadcopter ardupilot arduplane ardurover
Pixhawk px4 pro pix 32 bits controlador de vôo piloto automático-com 4g sd rc quadcopter ardupilot arduplane ardurover
RCDrone
Não foi possível carregar a disponibilidade de recolha
ESPECIFICAÇÕES do piloto automático do controlador de voo Pixhawk PX4 PRO PIX de 32 bits
Distância entre eixos: Placa inferior
Uso: Veículos e brinquedos de controle remoto
Atualizar peças/acessórios: Quadro
Suprimentos de ferramentas: Classe montada
Parâmetros técnicos: KV1100
Tamanho: 80*48*15
Periféricos/dispositivos de controle remoto: Controle remoto
Idade recomendada: 12+a,14+a
Peças e acessórios RC: Componentes do motor
Quantidade: 1 peça
Origem: China Continental
Número do modelo: PIXHAWK PRO
Material: EVA
Atributos de tração nas quatro rodas: Montagem
Para tipo de veículo: Aviões
Marca: rctosky

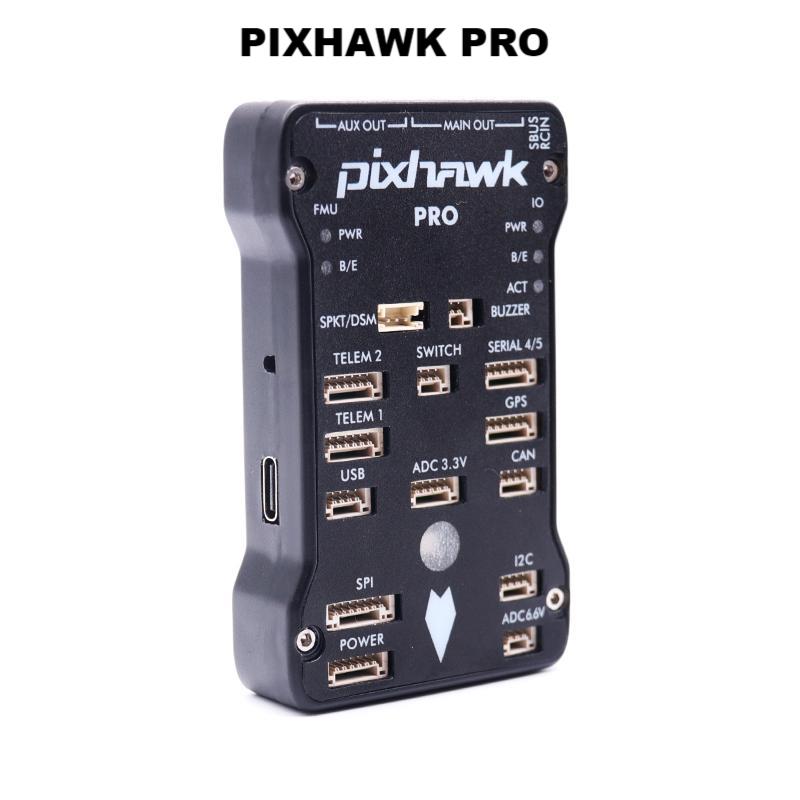
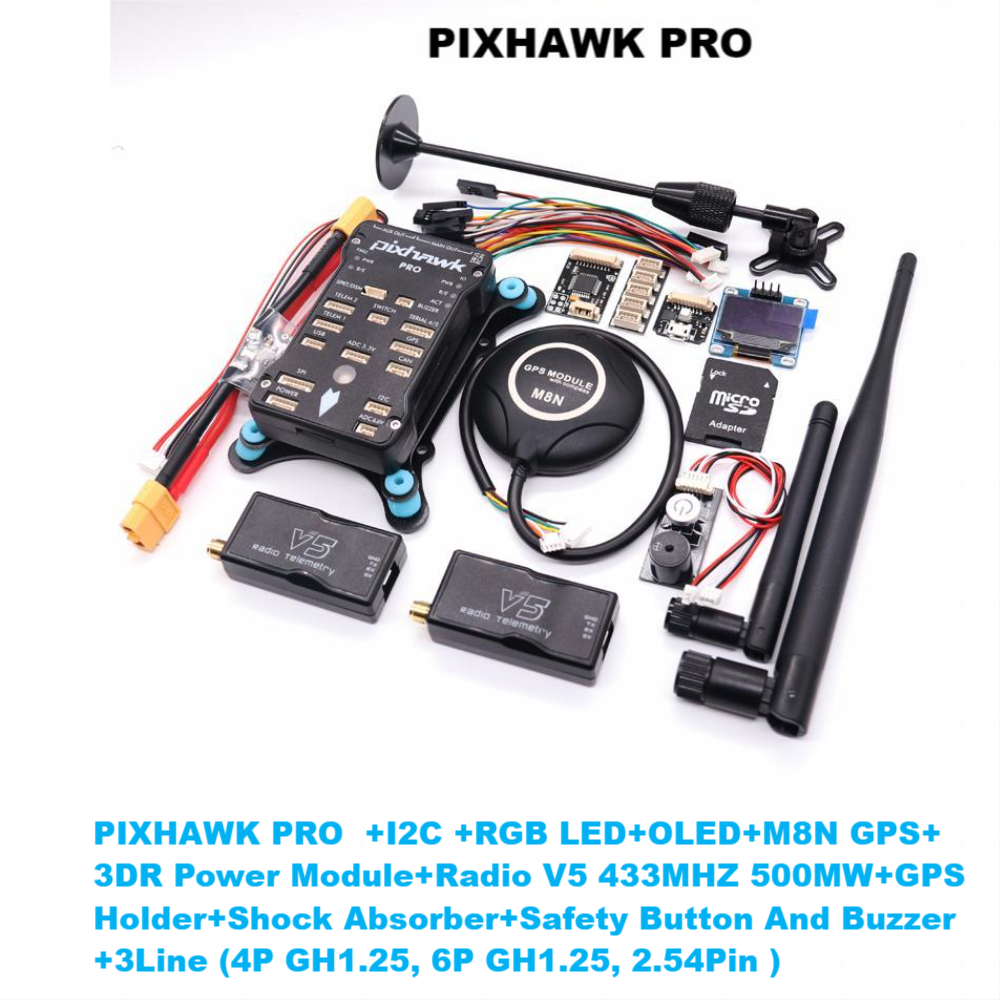
O Pixhawk suporta as versões mais recentes de firmware ArduPilot e PX4, incluindo 2.4.8 e PRO. Possui uma porta GH dedicada com um mecanismo de travamento para uma conexão mais estável e uma interface USB TYPE-C para comunicação confiável.
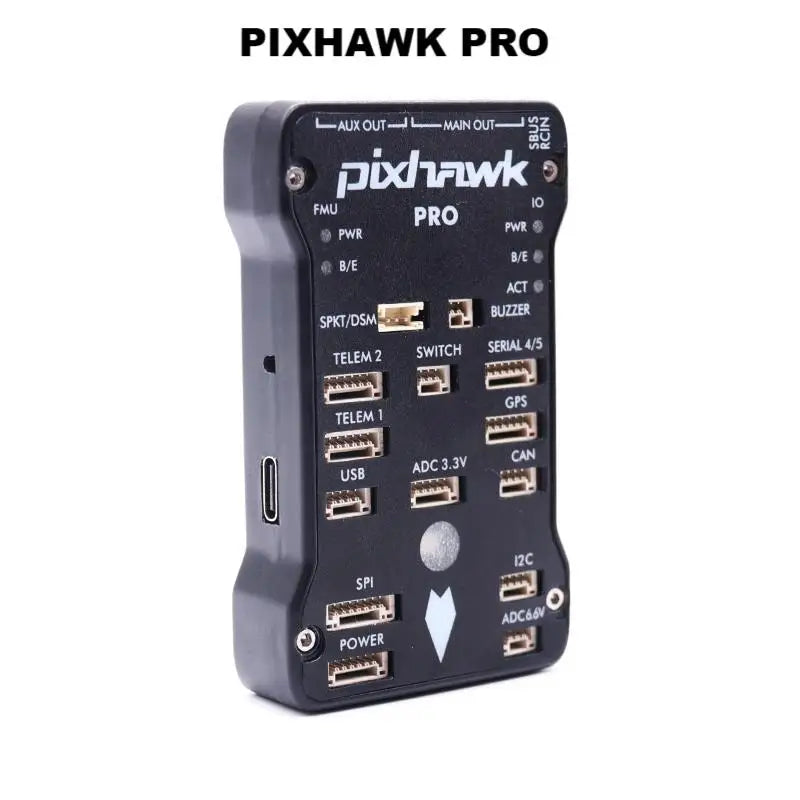



PIXHAWK PRO AUX Out- OUT 32 pixdnuwk FMU PRO PWR FWR BE BTE ACT SPKTDSM BUZZER TELEM Switch Serial4/5 TYPE-C USB TeLEM GPS USB ADC 3 3v CAN SpI 12C POWER AdcG6
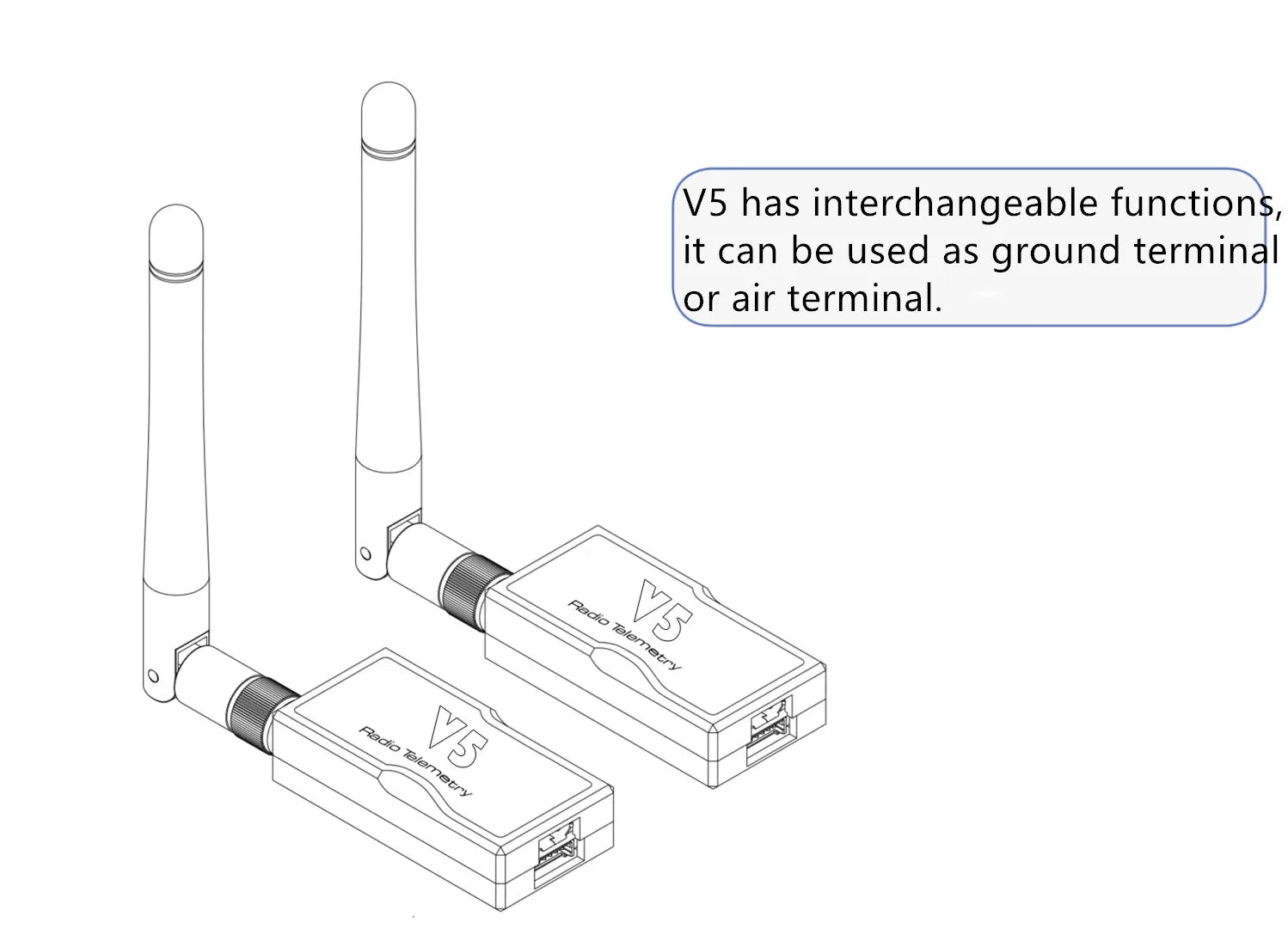
O controlador de vôo Pixhawk PX4 PRO possui funções intercambiáveis, permitindo que ele seja usado tanto como estação terrestre quanto como terminal aéreo.
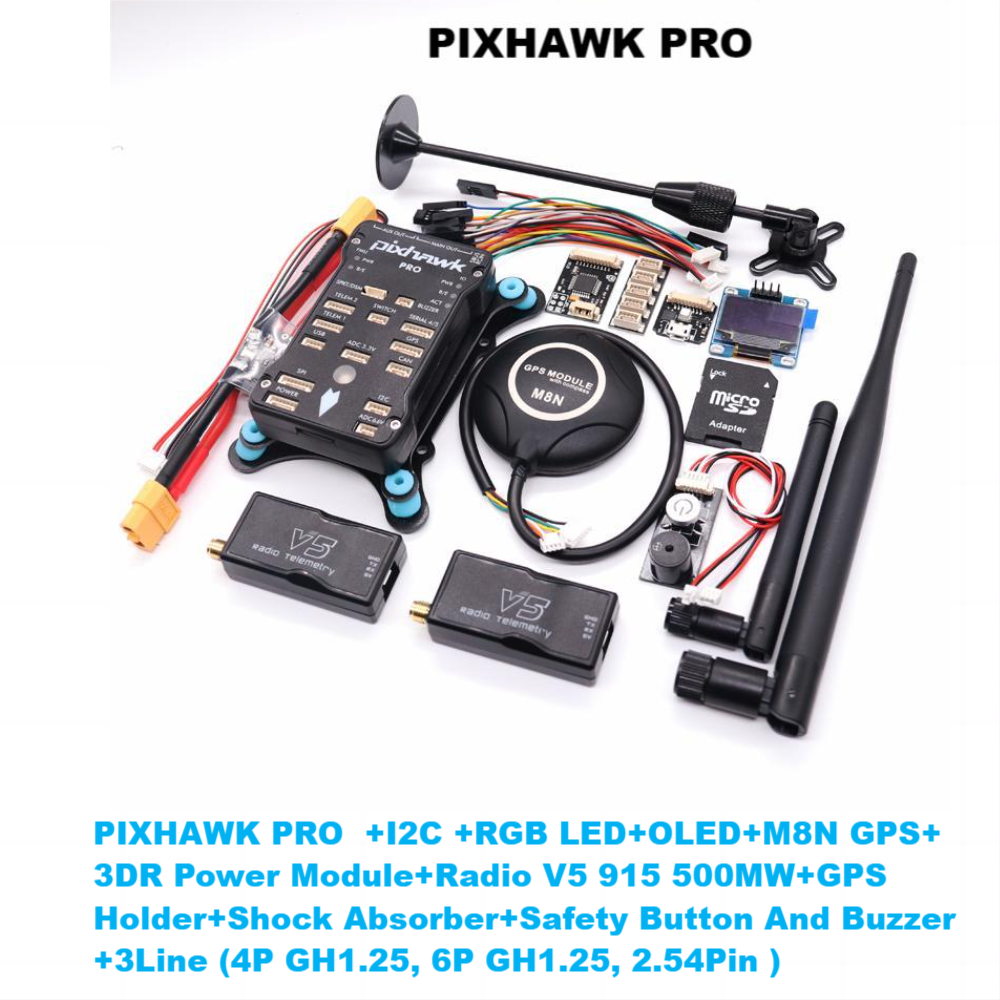
![[4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/H8ea99d00a908494db39129dc6647352a5_2f6b2a1e-638a-4d31-9f81-30e9dc1b04c8.webp?v=1714895618)
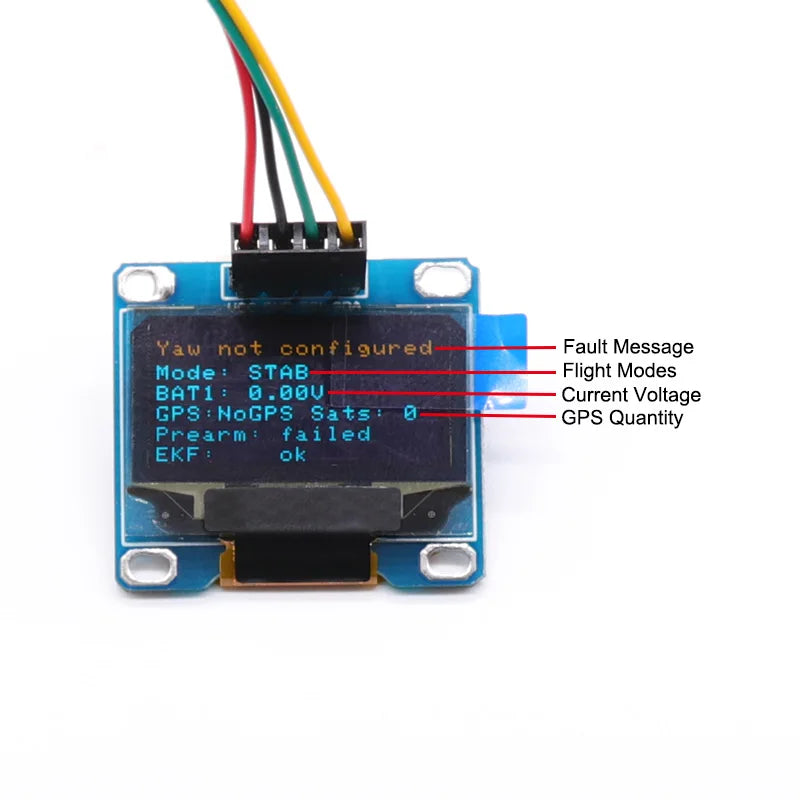
Aviso: não configurado. Modo de mensagem de falha: modos de voo estáveis indisponíveis. Nível da bateria: 0% (BAT1). Corrente: 0,00 uA. Tensão: desconhecida. GPS: nenhum sinal GPS disponível. Quantidade GPS: desconhecida. O pré-armamento falhou. EKF não inicializado.
Related Collections