







Pixhawk2.4.8 kit de quadro de fibra de carbono de controle de vôo 450-ardupilot 100mw rádio telemetria quadcopter blheli 20a 2212 motor esc
Pixhawk2.4.8 kit de quadro de fibra de carbono de controle de vôo 450-ardupilot 100mw rádio telemetria quadcopter blheli 20a 2212 motor esc
RCDrone
Não foi possível carregar a disponibilidade de recolha
PIXHAWK2.4.8 Kit de quadro de fibra de carbono 450 com controle de vôo ESPECIFICAÇÕES
Uso: Veículos e brinquedos de controle remoto
Idade recomendada: 12+a,14+a,6-12a
Origem: China Continental
Material: Fibra de carbono
Marca: rctosky
Pixhawk 2.4.8 suporta o firmware ardupilot oficial mais recente e o firmware PX4.
1. Os avançados processadores ARM CortexM4 de 32 bits de alto desempenho (flash de 2 MB) podem executar o sistema operacional NuttX RTOS em tempo real;
2. 14 saída PWM/servo;
3. Interface de barramento (UART, I2C, SPI, CAN);
4. A energia de backup integrada e o controlador de backup falham, o controlador primário faz failover para que o controle de backup seja seguro;
5. Fornece modos automáticos e manuais;
6. Fornece entrada de energia redundante e failover;
7. Luzes LED multicoloridas;
8. Fornece interface de campainha multitons
9. Gravação de dados de voo em micro SD;
Especificações:
Interface
1.5 UART 1, 2 compatível com alta tensão com controle de fluxo de hardware
2. 2 PODE
3. Entrada compatível com receptor de satélite Spektrum DSM / DSM2 / DSM-X
4.Entradas e saídas compatíveis com Futaba SBUS
Entrada de sinal 5.PPM
6. Entrada RSSI (PWM ou tensão)
7.I2C
8.SPI
Entrada 9.3.3 e 6.6VADC
10. Interface MICRO USB externa
Colocação simples:
F450+4 PCS BLHELI 30A +4 pares 1045 Hélices +4 PCS 2212 motor 920KV
Pacote Simples:
F450+4 PCS BLHELI 30A +4 pares 1045 hélices +4 PCS 2212 motor 920KV
Pacote padrão:
F450+4 PCS BLHELI 30A +4 pares 1045 hélices +4 PCS 2212 motor 920KV
PIXHAWK 2.4.8 (concha branca ou preta)+ Cartão 4G TF + Botão de segurança + Campainha + Codificador PPM + Placa de expansão I2C+ 3 linhas (4Pin 1.25 ,6Pin 1.25 ,3Pin 2.5.4)
Pacote alto:
F450+4 PCS BLHELI 30A +4 pares 1045 hélices +4 PCS 2212 motor 920KV
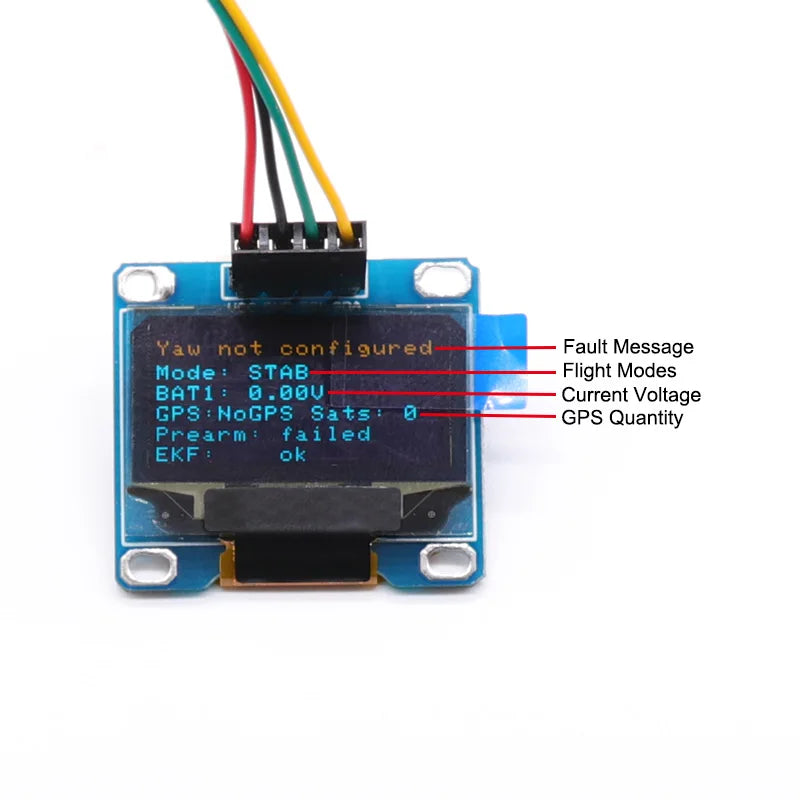
PIXHAWK 2.4.8 (concha branca ou preta)+ Cartão 4G TF + Botão de segurança + Campainha + Codificador PPM + Placa de expansão I2C+ Led RGB + Tela OLED+ 3 linhas (4 pinos 1,25 ,6 pinos 1,25 ,3Pino 2.5.4)
433MHZ 100MW A:
F450+4 PCS BLHELI 30A +4 pares 1045 Hélices +4 PCS 2212 920KV motor
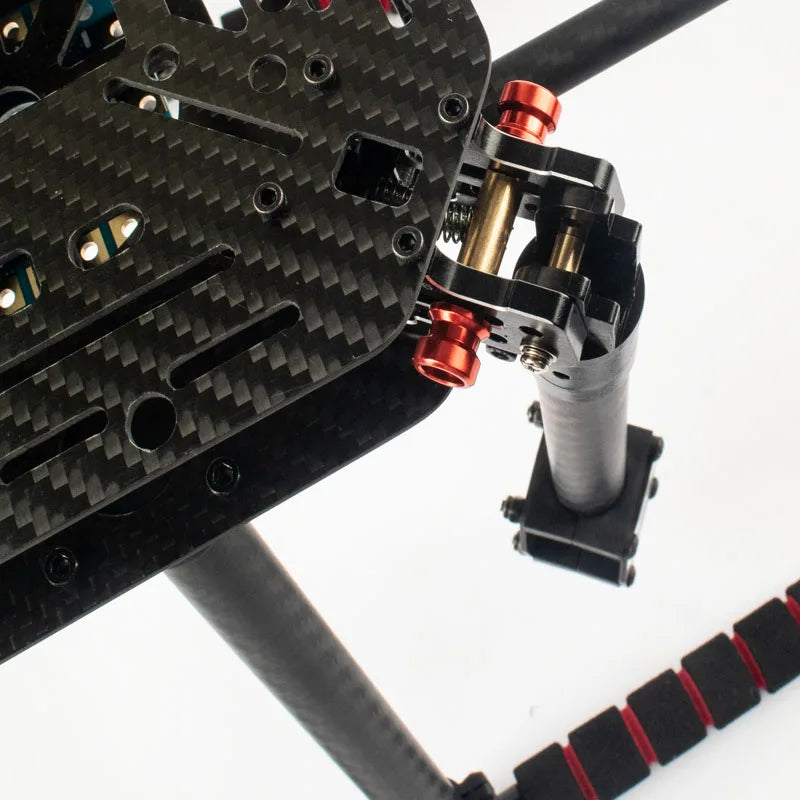
PIXHAWK 2.4.Cartão 8+ 4G TF + botão de segurança + campainha + codificador PPM + placa de expansão I2C + 3 linhas (4 pinos 1,25 , 6 pinos 1,25 , 3 pinos 2.5.4) + GPS M8N + suporte GPS + Módulo de potência 3DR + absorvedor de choque + telemetria de rádio 433 MHZ 100 MW
433MHZ 500MW B:
F450+4 PCS BLHELI 30A +4 pares 1045 Hélices +4 PCS 2212 920KV motor
PIXHAWK 2.4.8 (concha branca ou preta)+ Cartão 4G TF + Botão de segurança + Campainha + Codificador PPM + Placa de expansão I2C+ LED RGB + Tela OLED+ 3 linhas (4Pin 1.25 ,6Pin 1.25 ,3Pin 2.5.4 ) + GPS M8N + Suporte GPS + Módulo de potência 3DR + Amortecedor + Telemetria de rádio 433MHZ 500MW
433MHZ 1000MW C:
F450+4 PCS BLHELI 30A +4 pares 1045 hélices +4 PCS 2212 920KV motor
PIXHAWK 2.4.8 (concha branca ou preta)+ Cartão 4G TF + Botão de segurança + Campainha + Codificador PPM + Placa de expansão I2C+ LED RGB + Tela OLED+ 3 linhas (4Pin 1.25 ,6Pin 1.25 ,3Pin 2.5.4 ) + GPS M8N + Suporte GPS + Módulo de potência 3DR + Amortecedor + Telemetria de rádio 433MHZ 1000MW
915MHZ 100MW A:F450+4 PCS BLHELI 30A +4 pares 1045 Hélices +4 PCS 2212
PIXHAWK 2.4.8+ Cartão 4G TF + Botão de segurança + Campainha + Codificador PPM + Placa de expansão I2C+ 3 linhas (4Pin 1.25 ,6Pin 1.25 ,3Pin 2.5.4) + M8N GPS+ Suporte GPS+ Módulo de alimentação 3DR+ Amortecedor de choque +915MHZ 100MW Radiotelemetria
915MHZ 500MW B:
F450+4 PCS BLHELI 30A +4 pares 1045 Hélices +4 PCS 2212 920KV motor
PIXHAWK 2.4.8 (concha branca ou preta)+ Cartão 4G TF + Botão de segurança + Campainha + Codificador PPM + Placa de expansão I2C+ LED RGB + Tela OLED+ 3 linhas (4Pin 1.25 ,6Pin 1.25 ,3Pin 2.5.4 ) + GPS M8N + Suporte GPS + Módulo de potência 3DR + Amortecedor + Telemetria de rádio 915MHZ 500MW
433MHZ 1000MW:
F450+4 PCS BLHELI 30A +4 pares 1045 Hélices +4 PCS 2212 920KV motor
PIXHAWK 2.4.8 (concha branca ou preta)+ Cartão 4G TF + Botão de segurança + Campainha + Codificador PPM + Placa de expansão I2C+ LED RGB + Tela OLED+ 3 linhas (4Pin 1.25 ,6Pin 1.25 ,3Pin 2.5.4 ) + GPS M8N + Suporte GPS + Módulo de potência 3DR + Amortecedor + Telemetria de rádio 433MHZ V5 1000MW
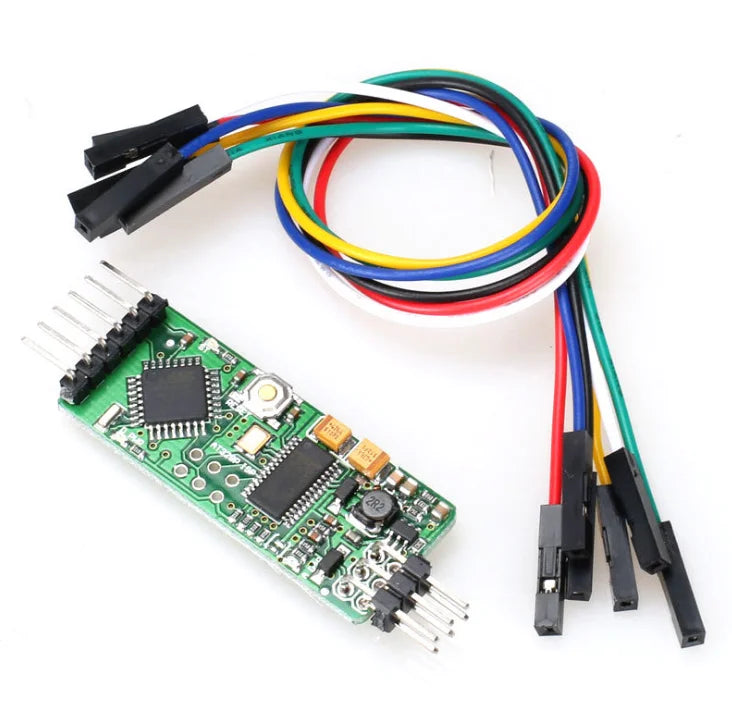
433MHZV5 1000MW OSD:
F450+4 PCS BLHELI 30A +4 pares 1045 Hélices +4 PCS 2212 920KV motor
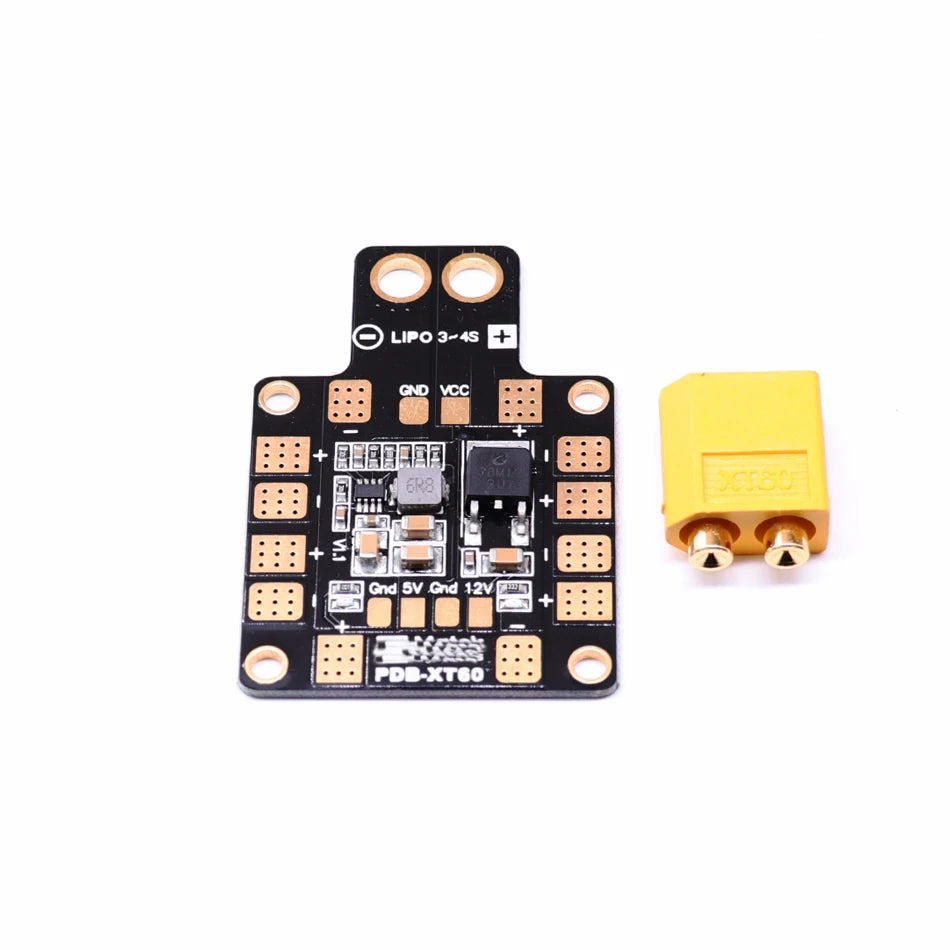
PIXHAWK 2.4.8 (concha branca ou preta)+ Cartão 4G TF + Botão de segurança + Campainha + Codificador PPM + Placa de expansão I2C+ LED RGB + Tela OLED+ 3 linhas (4Pin 1.25 ,6Pin 1.25 ,3Pin 2.5.4) + M8N GPS + Suporte GPS + Módulo de potência 3DR + Amortecedor + 433MHZ V5 1000MW Rádio telemetria +MINI OSD +PDB
Pacote SUPERIOR:
F450+4 PCS BLHELI 30A +4 pares stravamento automático< T35411>



A.Recursos
A1: Use componentes eletrônicos autênticos para garantir alta qualidade e melhorar a capacidade de resistência atual do ESC.
A2: Baseado no firmware BLHeli, otimizado para alto desempenho com grande linearidade e resposta do acelerador muito mais rápida.
A3: Especial projetado para multirotores e compatível com aeronaves e helicópteros de asa fixa.
A4: Vários recursos de proteção, incluindo proteção contra corte de baixa tensão/proteção contra superaquecimento/proteção contra perda de sinal do acelerador.
A5: A faixa do acelerador pode ser configurada e é totalmente compatível com todos os receptores, proporcionando resposta do acelerador suave, linear e precisa. A6: Todos os parâmetros podem ser programados usando um transmissor, incluindo configurações padrão.
B. Especificações do produto
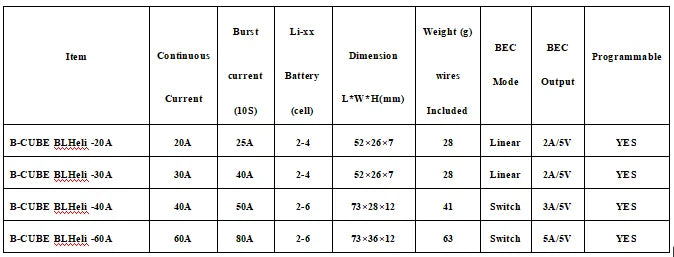
BEC BEC Treni Cobnbuou: DileD D Corrente programável Batfert Vir e: Modo Saída Currenr LtutHoinil (105) Iocluded B-CCBE BLHeli -20A 026 27 LineAr 4T"

1045 hélices

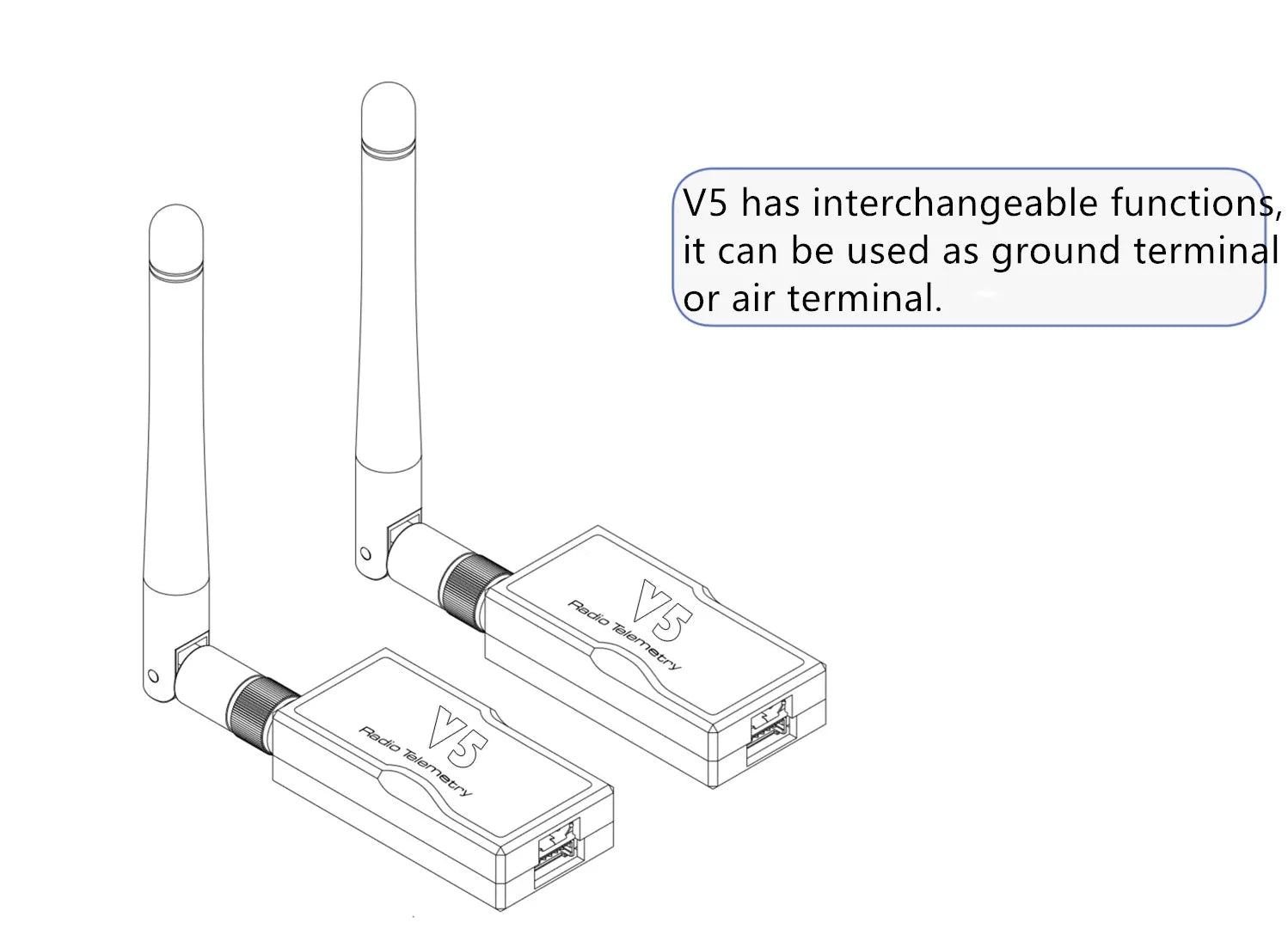
O módulo V5 apresenta funcionalidade intercambiável, permitindo que ele sirva como estação terrestre ou terminal aéreo.
![[4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/H8ea99d00a908494db39129dc6647352a5_286b8762-ba49-44db-a8cd-b38c172bd03c.webp?v=1714895788)


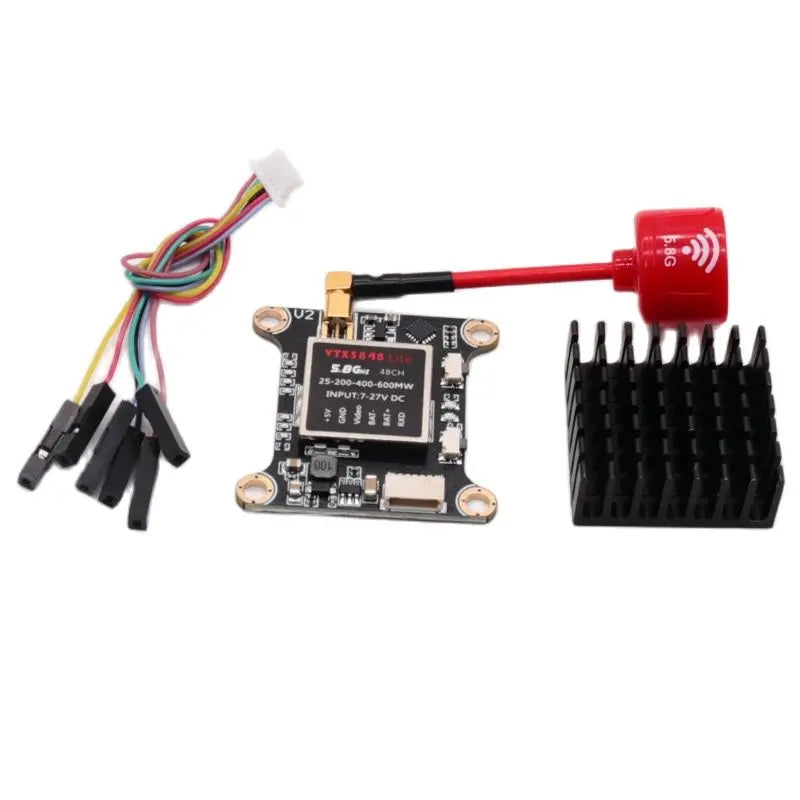
VTX5848 é um transmissor de vídeo, suporta 25MW-600MW,48 canais (com dissipador de calor e 3DBantena)
Câmera FPV

Este artigo explica como conectar ESCs, motores e hélices a um piloto automático.O Pixhawk é usado como exemplo, mas outros pilotos automáticos são conectados de maneira semelhante.
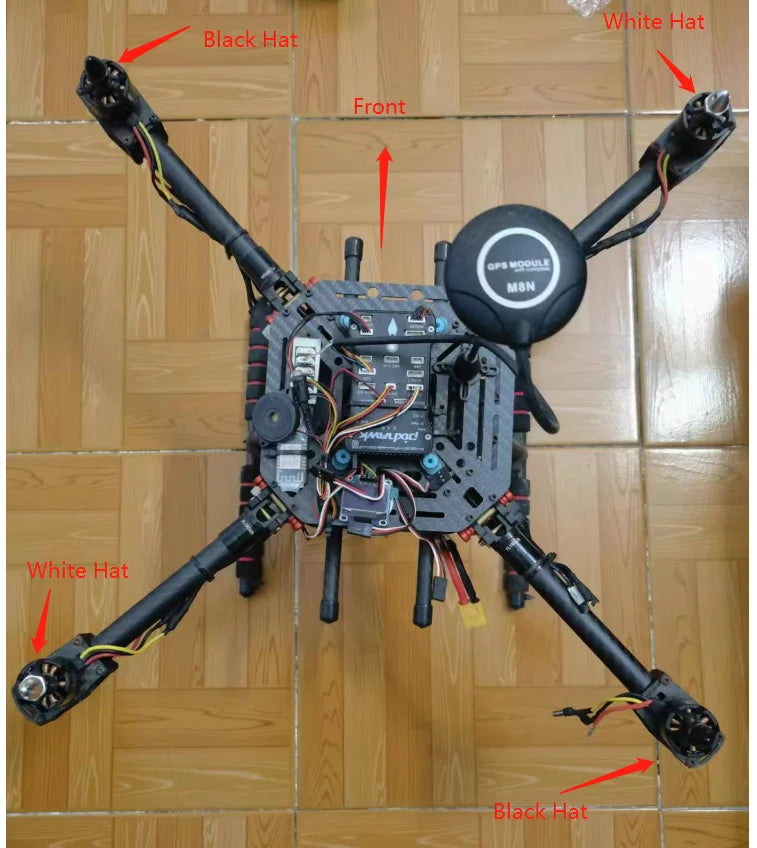
Conecte os fios de alimentação (+), terra (-) e sinal(es) de cada ESC aos pinos de saída principais do piloto automático por número do motor. Encontre seu tipo de chassi abaixo para determinar a ordem atribuída aos motores.

Pinos de saída Pixhawk (numerados). Os primeiros 4 pinos são codificados por cores para conectar um Quadframe
Diagramas de ordem do motor
Os diagramas abaixo mostram a ordem do motor para cada tipo de carcaça. Os números indicam qual pino de saída do piloto automático deve ser conectado a cada motor/hélice. A direção da hélice é mostrada em verde (sentido horário, CW) ou azul (sentido anti-horário, CCW)

Legenda para diagramas de ordem de motor
Quadricóptero

Reconhecendo hélices no sentido horário e anti-horário

Os diagramas acima mostram dois tipos de hélices: no sentido horário (chamados de empurradores) e no sentido anti-horário (chamados de extratores). O mais confiável para reconhecer o tipo correto de hélice pelo seu formato, conforme mostrado abaixo. A borda mais espessa é a borda principal que se move na direção da rotação. A borda posterior é mais radicalmente recortada e geralmente mais fina.
Como instalar o motor?
Related Collections






















