







QAV250 250mm FPV Racing Drone Kit com 2205 2300kV Motors, F4 Flight Controller, LittleBee 30a BLHELI_S ESC e câmera 1200TVL
QAV250 250mm FPV Racing Drone Kit com 2205 2300kV Motors, F4 Flight Controller, LittleBee 30a BLHELI_S ESC e câmera 1200TVL
RCDrone
Não foi possível carregar a disponibilidade de recolha

Incluído no Pacote:
1 x Kit de quadro de fibra de carbono ZMR250
4 motores RS2205 2300kV
4 x ESC Littlebee 30A (Observação: Existem dois tipos de ESC Littlebee 30A, enviaremos aleatoriamente.)
1 x F3 Acro / F4 V3S / Controlador de voo F405 Plus (Envie como você escolher)
1 x Placa de Distribuição de Energia
1 câmera de 1200TVL
4 hélices x 5045
1 x UBEC
1 x alça de bateria
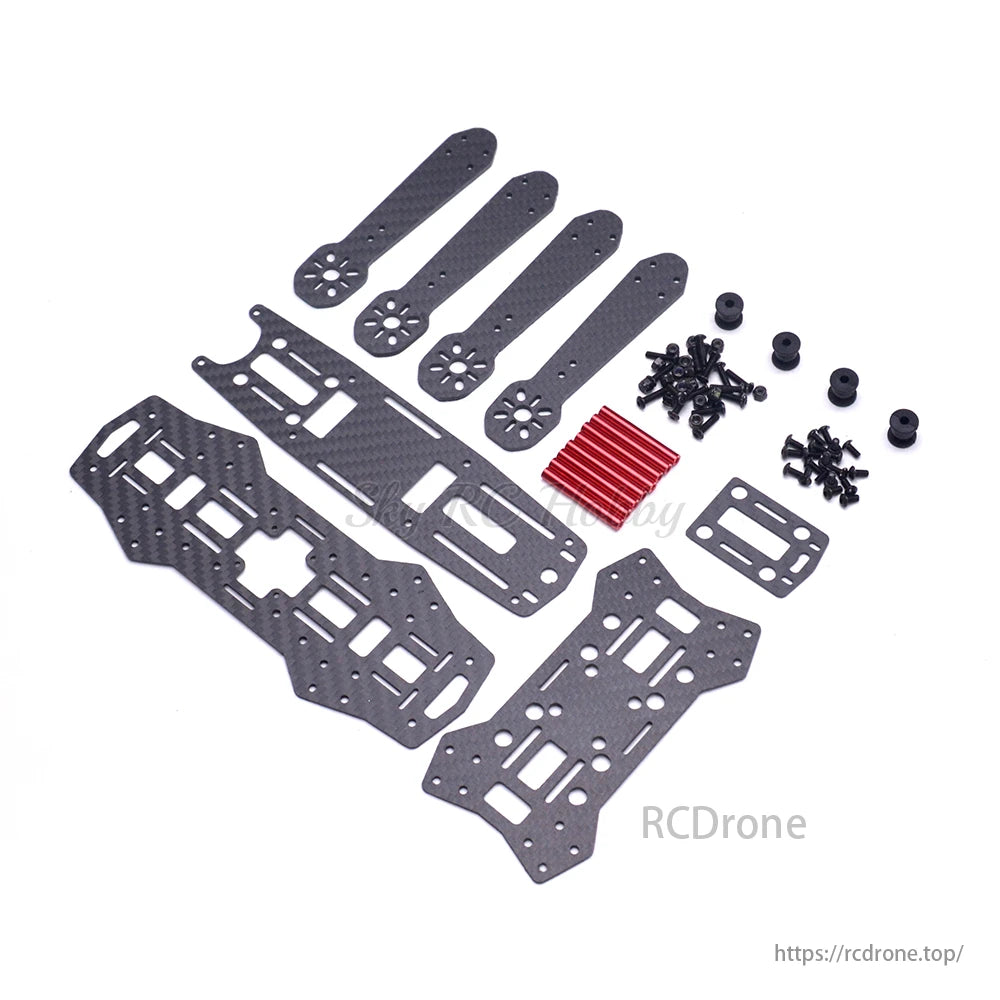
Kit de quadro de fibra de carbono QAV250 de 250 mm:
Especificações:
- Material principal: Fibra de carbono completa
- Com amortecedor de borracha para diminuir a vibração durante o voo
- Espaçador de liga de alumínio, leve e confiável
- Distância entre eixos: 250 mm
- Peso: 136g±2

Controlador de voo F3 ACRO:
Características
• Sem comprometer E/S. Use todos os recursos o tempo todo; por exemplo, conecte seu OSD + SmartPort + SBus + GPS + LED Tira + Monitoramento de bateria + Sonar + 8 motores - tudo ao mesmo tempo!
• Registrador de voo de caixa preta de alta capacidade integrado - otimize seu ajuste e veja os resultados de sua configuração sem adivinhação (Deluxe).
• Processador STM32 F3 de última geração com unidade de ponto flutuante de hardware para cálculos de voo eficientes e mais rápidos
Núcleo ARM-Cortex M4.
• Design empilhável - perfeito para integração com OSDs e placas de distribuição de energia.
• 16 linhas de E/S PWM para ESCs, Servos e receptores legados. 8 disponíveis em conectores de pinos padrão. 8 via lateral conectores montados.
• Suporte total para OneShot ESCs para fácil ajuste de PID e uma resposta mais nítida.
• Suporta receptores SBus, SumH, SumD, Spektrum1024/2048, XBus, PPM e PWM. Não requer inversores externos. (embutido).
• Saída dedicada para LEDs programáveis - ótima para orientação, corrida e voos noturnos.
• Porta I2C dedicada para conexão de display OLED sem necessidade de bateria de voo.
• Portas de monitoramento de bateria para tensão e corrente.
• Suporte de sonar para sustentação precisa em baixas altitudes.
• Porta de campainha para avisos sonoros e notificações.
• Porta de depuração amigável ao desenvolvedor (SWD) e seleção de modo de inicialização, bootloader não bloqueável.
• Design simétrico para uma fiação super organizada.
• Faça a conexão usando conectores de pinos, soquetes JST-SH ou terminais de solda. Use conectores de pinos retos ou em ângulo reto.
• Barômetro montado na parte inferior da prancha para fácil isolamento do vento.
• Tempos de loop até ~2x mais rápidos que as placas baseadas em STM32F1 da geração anterior.
• Configuração do controlador de voo por meio de uma interface gráfica multiplataforma (Windows/OSX/Linux).
• Suporta uma variedade de aeronaves, tricópteros, quadricópteros, hexacópteros, octocópteros, aviões e muito mais.
Software
O SPRacingF3 executa o software de controle de voo (FC) Cleanflight de código aberto, que tem uma comunidade em constante crescimento de desenvolvedores e usuários amigáveis. Ser de código aberto significa que você também pode contribuir para o sistema.
O Cleanflight vem com um manual detalhado que é revisado e mantido pelos desenvolvedores do Cleanflight e comunidade. Chega de páginas wiki desatualizadas e informações de segunda mão.
Certifique-se de consultar o manual apropriado para sua versão de firmware.
História
O hardware foi projetado pelo principal desenvolvedor do Cleanflight, Dominic Clifton, para ser mais capaz do que o Placas baseadas em STM32F1 após ouvir o feedback dos usuários, colaboradores e principais pilotos do Cleanflight.
O não cumprimento destes avisos anulará a sua garantia e destruirá o seu voo. controlador.
• Observe a polaridade SEMPRE. Verifique e CONFIRA DUAS VEZES antes de ligar a energia.
• DESLIGUE antes de desconectar, conectar ou fazer qualquer conexão.
• Conecte apenas uma FONTE de energia aos pinos VCC / Não conecte mais de uma fonte de energia para dois ou mais pinos VCC. por exemplo, se você estiver usando ESCs com BECs, remova o fio VERMELHO central de todos os conectores ESC, exceto um.
• Não conecte GND, VCC ou 3,3 V entre si (curto-circuito).
• Não conecte GND, VCC ou 3,3 V a nenhuma entrada ou saída, a menos que seja especificamente indicado.
• Não conecte nenhuma entrada ou saída a nenhuma outra entrada ou saída, a menos que seja especificamente
afirmou.
• A alimentação de 3,3 V é somente para uso de baixa corrente. 100 mA MÁX.
• Não permita que sujeira/poeira/cola/etc. entrem no sensor de pressão (barômetro).
• Mantenha os ímãs longe do controlador de voo.
AVISOS
CONSELHOS GERAIS
Siga as dicas abaixo para melhor desempenho e longa vida útil do seu controlador de voo:
• Aplique resina/cola para reforçar os conectores JST-SH - ajuda se sua aeronave cair.
• É recomendado usar um gabinete/caixa para o controlador de voo.
• Instale espuma de células abertas sob o sensor de pressão - coloque um pouco entre o FC e moldura.
• Passe os fios do motor/bateria o mais longe possível do sensor da bússola (magnetômetro) quanto possível.
• Instale os pinos do jumper BOOT somente se precisar deles.
• Recomenda-se o uso de conectores de pinos codificados por cores (não fornecidos), especialmente para VBAT cabeçalhos.
• Faça tudo o que puder para evitar que as vibrações cheguem ao sensor do acelerômetro/giroscópio.
Especificações:
* Placa de 36x36 mm com furos de montagem de 30,5 mm.
* CPU STM32F3.
* Acelerômetro/giroscópio MPU6050
* Entrada MicroUSB.
* 4x soquetes JST-SH de 4 pinos (I2C, SWD, 2xUART)
* 2 soquetes JST-SH de 8 pinos (PPM, PWM, SERIAL RX, GPIO, ADC, 3V, 5V, GND)
* 8 furos passantes de 3 pinos para conectores de pinos para conexões ESC/Servo.
* 2x furos passantes de 4 pinos para conectores de pinos para 2 portas seriais.
* 2x 2 pinos de furos passantes para conectores de tensão da bateria e campainha.


Especificação do controlador de voo F4 V3S Plus:
Firmware: OMNIBUSF4SD
Tamanho: 36x36mm
Furos de montagem: 30,5x30,5 mm
Microcontrolador STM32 F405
Suporte Dshot
Arrastar e soltar OSD configurado via Betaflight
MPU: MPU6500 / MPU6000 (Enviar aleatoriamente)
Portas SBUS / PPM e Spketrum DSMX
Caixa preta para cartão MicroSD
Baro (BMP280)
5v3a 9V3A BEC
Filtros de vídeo integrados (apenas 5V para VTX e câmera)
Com um processador F4, Betaflight OSD integrado, MicroSD Black Box, 5v3a sbec, filtro de vídeo, você estará ajustando pids com seu transmissor e
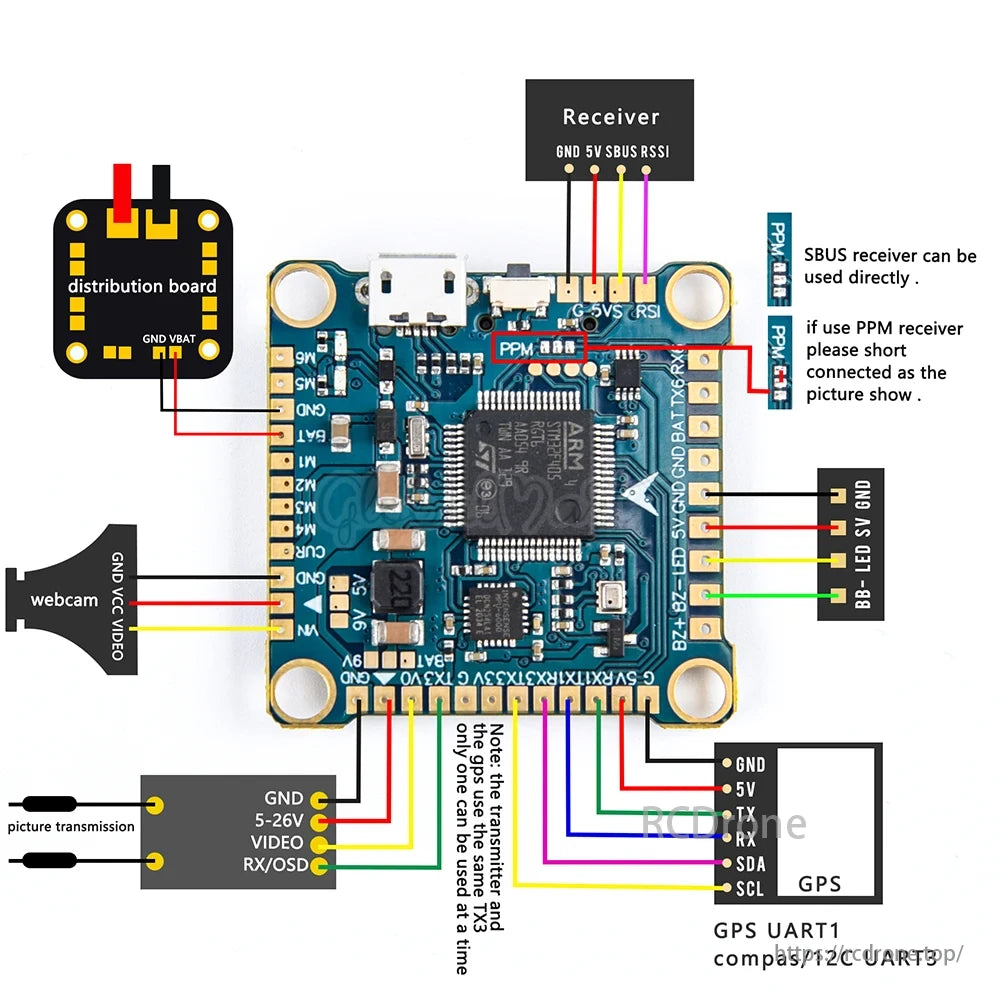
Diagrama de fiação do drone QAV250 FPV. Conecta placa de distribuição, webcam, transmissão de imagens, receptor (SBUS/PPM) e GPS. Destaques: UART1 para GPS e UART3 para bússola/I2C.

Controlador de voo F4 V3S Plus para drone QAV250 FPV. Possui porta USB, vários conectores e pinos identificados para fácil integração e controle.
Parâmetros do produto:
MCU: STM32F405RGT6 168MHz
Giroscópio: Mpu6500
Baro:Bmp280
OSD: Betaflight SPI OSD DJI HD OSD (UART5)
Caixa preta: 16 MB
6x UARTs: UART 1/2/3/4/5/6
4 saídas PWM
1x I2C
2x LEDs para STATUS FC (Azul) e indicador de 3,3 V (Vermelho) e indicador de 5 V (Vermelho) e indicador de 9 V (Vermelho)
USB Tipo C (USB 2.0)
1x conector JST-SH1.0_8 pinos (Gnd/Vbat/S1/S2/S3/S4/Curr/Rx3)
1x conector JST-SH1.0_6 pinos (9V/GND/T5/R5/GND/R2)
Potência filtrada VTX 9V
OSD DJI FPV é suportado por qualquer UART sobressalente
LED: 4 pads LED independentes, suporte para saída de lâmpada de programação WS2812.
Receptor: Suporta Sbus, crsf, ibus, SBUS, receptor XBUS,
A entrada padrão do receptor é UART2 (você pode soldar ELRS RX no UART2).
Potência: Tensão de entrada: 3-6S
BEC: BEC de canal duplo 5V/10V 3A máx. suporta fornecimento de energia estável no lado do céu do DJI
LDO 3,3 V: Máx. 1 A
Firmware FC: Firmware BetaFlight: DAKEFPVF405
Firmware INAV: DAKEFPVF405
Montagem:
Tamanho da instalação: 30,5 mm × 30,5 mm O furo de instalação é M4 e suporta a instalação da coluna de choque
Tamanho externo 36 mm × 36 mm
Peso do controle de voo: 6,9g
Sensor de voltagem de controle de voo a bordo.



Motor RS2205 2300kv:
Nota: Devido aos diferentes lotes de produção, existem dois tipos de design do motor, enviaremos o motor aleatoriamente.

Quatro motores de drone QAV250 FPV da Ready Tosky, com design preto e vermelho e fiação visível para montagem do drone.

Observação: Existem dois tipos de ESC Littlebee 30A, que enviaremos aleatoriamente.

Quatro controladores de velocidade LITTLEBEE 30A-S BLHeli_S OPTO ESCs favoritos suportam baterias LiPo 2-6S. Eles apresentam um design compacto com conectores banhados a ouro. Fios pretos e laranja indicam as conexões de energia. Esses controladores eletrônicos de velocidade regulam a velocidade do motor em drones FPV, como o QAV250, garantindo controle preciso e desempenho eficiente. Seu design elegante e construção robusta sugerem confiabilidade para corridas de drones de alto desempenho e aplicações de fotografia aérea. Ideal para entusiastas que buscam qualidade e desempenho.

ESCs BLHeli S favoritos para o drone QAV250 FPV. LittleBee-Spring 30A, compatível com Dshot, suporta LiPo 2-6S. Quatro unidades com fios vermelho, preto e branco incluídos. Design compacto para desempenho eficiente.

ESC favorito BLHeli S LittleBee-Spring30A 2-6S LIPO Dshot com fios vermelho, preto e branco para drone QAV250 FPV.

Related Collections







