



Controlador de Voo RadioLink CrossFlight – Estabilidade tipo Mini Pix, 10 canais PWM, OSD integrado, compatível com multirrotores, aviões, carros e barcos
Controlador de Voo RadioLink CrossFlight – Estabilidade tipo Mini Pix, 10 canais PWM, OSD integrado, compatível com multirrotores, aviões, carros e barcos
RadioLink
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Controlador de Voo CrossFlight da RadioLink oferece desempenho ao nível do Mini Pix em um formato compacto de apenas 39.7×39.7×13mm e pesa apenas 39g. Com suporte para 10 canais de saída PWM, módulo OSD integrado, e avançado amortecimento de vibrações baseado em software, proporciona estabilidade superior e precisão de voo para multirrotores, drones de corrida micro, aeronaves de asa fixa, carros RC, barcos, submarinos e muito mais. O firmware de código aberto está disponível no GitHub, tornando-o ideal para desenvolvedores que buscam flexibilidade e personalização.
Principais Características
-
Tamanho Mini (39.7×39.7×13mm), Leve (~39g)
Perfeito para drones compactos, de alta velocidade ou cinematográficos. -
Software de Amortecimento de Vibrações (Altitude Hold tão Estável quanto Mini Pix)
Elimina a necessidade de suportes que absorvem vibrações, garantindo dados de sensor precisos para um voo estável em qualquer condição. -
Módulo OSD Integrado
Exibição em tempo real de dados de voo, incluindo GPS, voltagem, corrente, velocidade do vento e rota de retorno, compatível com ArduPilot. -
10 Canais de Saída PWM
Suporta configurações flexíveis de motores e servos para aplicações UAV complexas. -
Sistema de Testes de Automação
Garante um controlo de qualidade rápido e fiável, reduzindo o tempo de teste de ~19 minutos (manual) para menos de 5 minutos. -
Compatibilidade Robusta com Ecossistemas
Compatível com registo em cartão TF, módulos GPS/Ultrassónicos, módulos de telemetria e módulos de potência. -
Algoritmo Avançado de Filtragem de Kalman
Melhora a precisão de navegação para drones autónomos e veículos agrícolas, comprovado em projetos cinematográficos e industriais.
Especificações
|
Peso & Dimensão
|
Dimensão
|
39.7*39.7*12.1mm (1.56"*1.56"*0.48")
|
|
Peso
|
16.5g(0.58oz), 54g(1.9oz quando todos os fios de conexão estão incluídos)
|
|
|
Hardware
|
Processador
|
HC32F4A0PITB
|
|
Sensor
|
Giroscópio & Acelerómetro
|
BMI270
|
|
Compasso
|
VCM5883L
|
|
|
Barómetro
|
LPS22HB
|
|
|
FRAM
|
Sem FRAM, utilize a memória flash interna para armazenar parâmetros, 2617 pontos de referência para multirrotores e 2623 pontos de referência para aviões, carros e barcos. |
|
|
Buzzer
|
1
|
|
|
Interruptor
|
Nenhum
|
|
|
Conector
|
Tipo
|
JST GH1.25 Conector
|
|
Saída PWM
|
10 Saídas PWM
|
|
|
UART Mavlink
|
2 (sem CTSRTS)
|
|
|
Porta USB
|
1 (Tipo-C)
|
|
|
Porta GPS UART/I2C
|
1
|
|
|
Entrada de Sinal
|
PPM/SBUS/CRSF
|
|
|
Saída RSSI
|
Suporte
|
|
|
Módulo OSD
|
Módulo OSD Integrado
|
|
|
Protocolo ESC
|
PWM, DShot, e Protocolo OneShot
|
|
|
RTK
|
Apoio
|
|
|
Requalificação
|
Apoio
|
|
|
Módulo de Potência
Especificações |
Peso
|
16g(0.56oz) sem fio
|
|
Tensão de Entrada
|
2-12S
|
|
|
Corrente Máxima de Detecção
|
90A
|
|
|
Tensão de Saída (BEC)
|
5.3V±0.2V
|
|
|
Corrente de Saída (BEC)
|
2A
|
|
|
ESC Único Máxima
Corrente de Detecção |
22.5A
|
|
|
Modelos Adaptáveis
|
||
|
Parâmetros Operacionais
|
USB Tensão
|
5V±0.3V
|
|
Servo Voltagem
|
Não aplicável
|
|
|
Temperatura de Operação
|
-30~85℃
|
Aplicações
-
Drones Multirotor e de Corrida Micro (e.g.210, 220, 250 quadros)
-
Aviões de Asa Fixa
-
Helicópteros
-
Carros e Barcos RC
-
Submarinos e Rastreadores de Radar
-
UAVs Agrícolas
-
Veículos Terrestres Autónomos
-
Drones Cinemáticos para Filmagens de Acrobacias ou Supercarros
Conteúdo da Embalagem
-
CrossFlight Controlador de Voo ×1
-
Módulo de Potência (suporte 2–12S) ×1
-
Buzzer ×1
-
Placa de Transferência I2C ×1
-
LED Indicador de Estado do FC ×1
-
Cartão TF 4G (MicroSD) ×1
-
Cabo de Buzzer & Receptor ×1
Power Module Cable ×1
-
Cabo de Transferência I2C ×1
-
Cabo de Porta OSD ×1
-
Cabo TELEM1&2 ×1
-
Cabo LED de Estado do FC ×1
-
Fita dupla face ×1
-
Cabo Tipo-C ×1
-
Manual do Utilizador ×1
-
Caixa de Embalagem ×1
Destaques
-
Sistema de teste automatizado igual ao PIXHAWK/Mini Pix garante desempenho e qualidade.
-
Projetado tanto para drones de alta velocidade como para maquinaria agrícola precisa.
-
Rede de fornecimento fiável com mais de 20 anos de desenvolvimento, não afetada pela escassez de chips durante 2020–2022.
Detalhes

A CrossFlight oferece amortecimento de vibrações, código fonte no GitHub. Suporta multirotores, drones, aviões, carros, barcos, submarinos, rastreadores de radar. Inclui OSD, 10 saídas PWM, testes de automação, suporte técnico. Custo-efetivo.
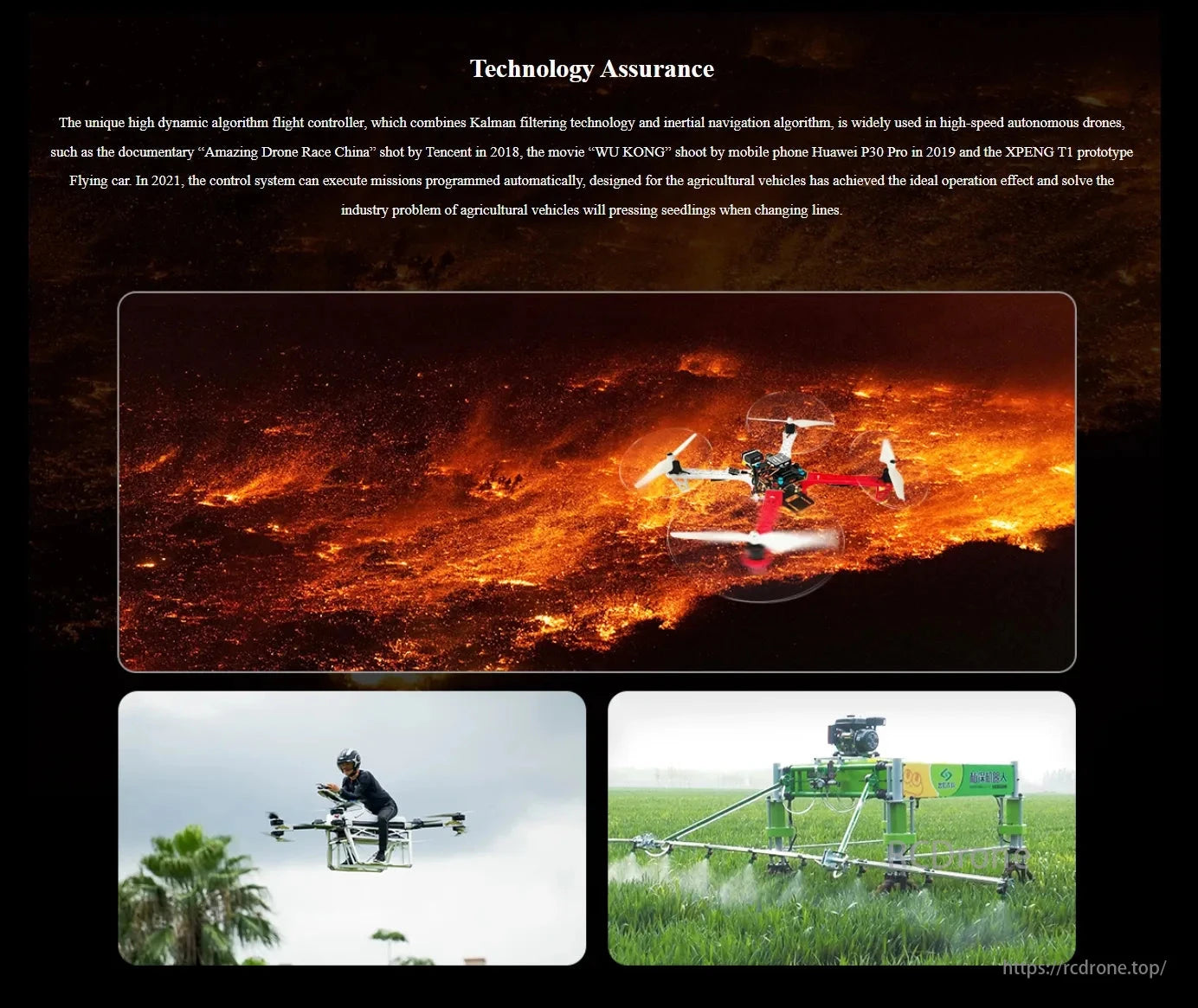
Garantia de Tecnologia. O controlador de voo de algoritmo dinâmico único combina filtragem de Kalman e navegação inercial, utilizado em drones autónomos, filmes e veículos agrícolas para controlo preciso e automação.

Garantia de Fornecimento: 20 anos na indústria, 10 em controlo de voo. PIXHAWK estável, Mini Pix, fornecimento Byme-A/D apesar da escassez de chips.Atualizações contínuas garantidas. (40 palavras)
O Sistema de Teste de Software de Automação garante a qualidade para o CrossFlight. Ele automatiza testes desde sensores até portas, superando métodos manuais em eficiência superior e fiabilidade funcional.
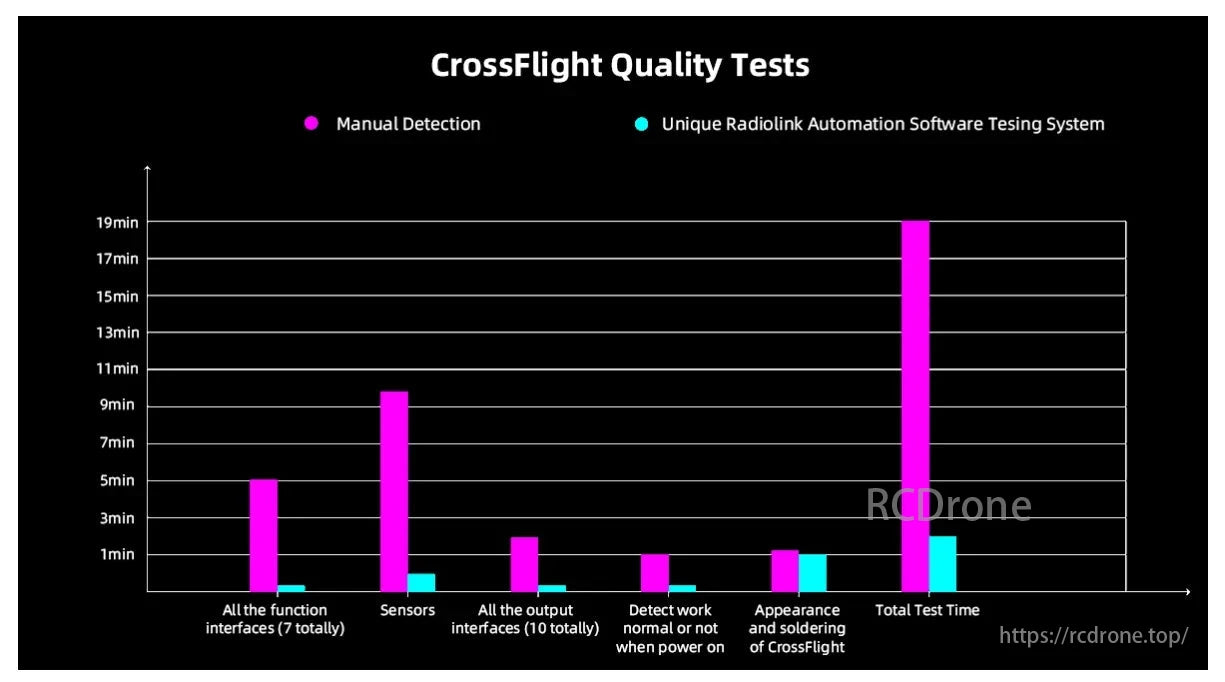
Os Testes de Qualidade do CrossFlight comparam a deteção manual e os tempos do Sistema de Teste de Software de Automação Unique Radiolink para interfaces de função, sensores, interfaces de saída, deteção de energia, aparência, soldagem e tempo total de teste.
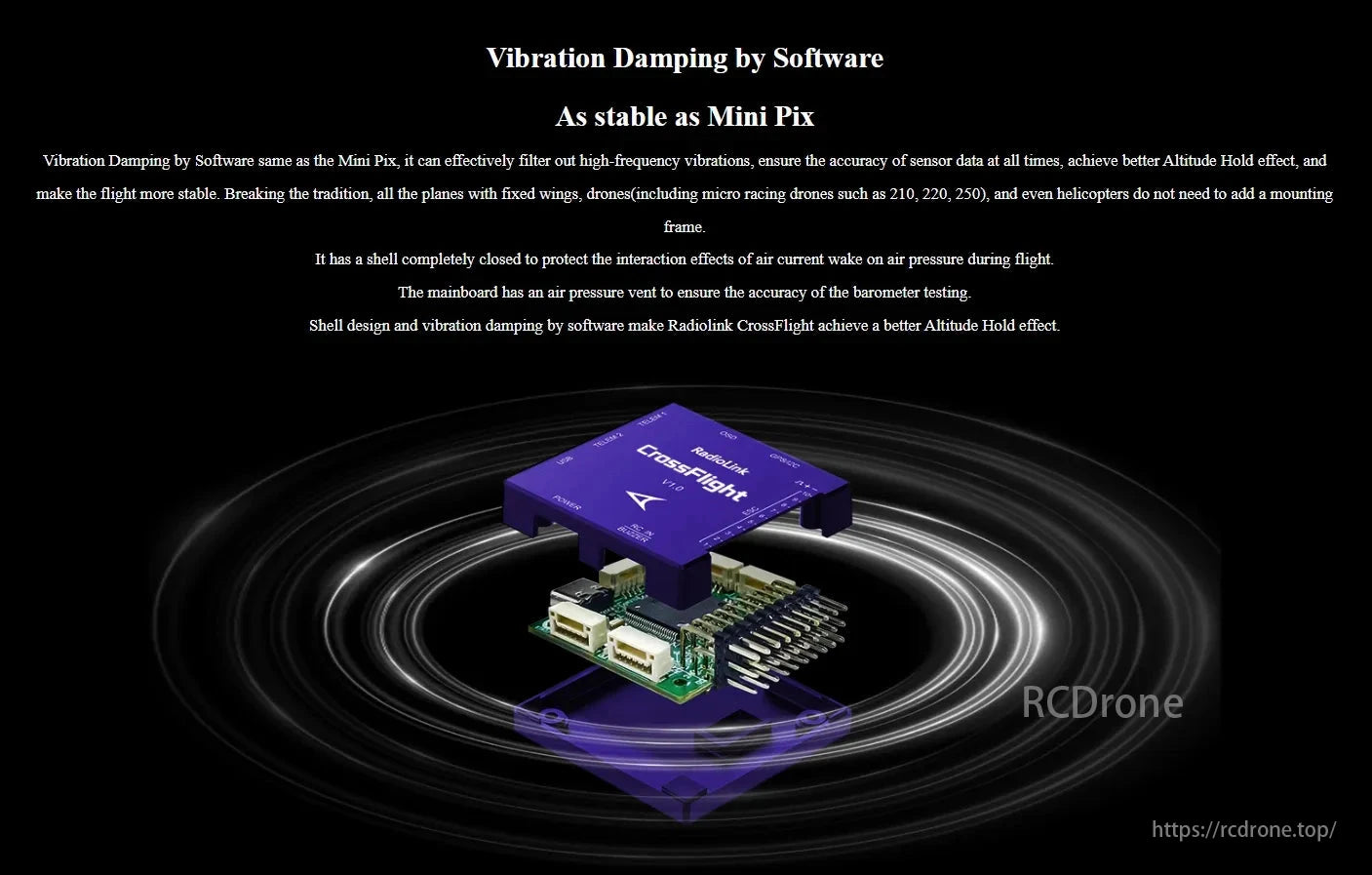
O Controlador de Voo CrossFlight fornece amortecimento de vibrações baseado em software para voos estáveis e sensores precisos. Sua carcaça protege contra pressão do ar, melhorando a manutenção da altitude.
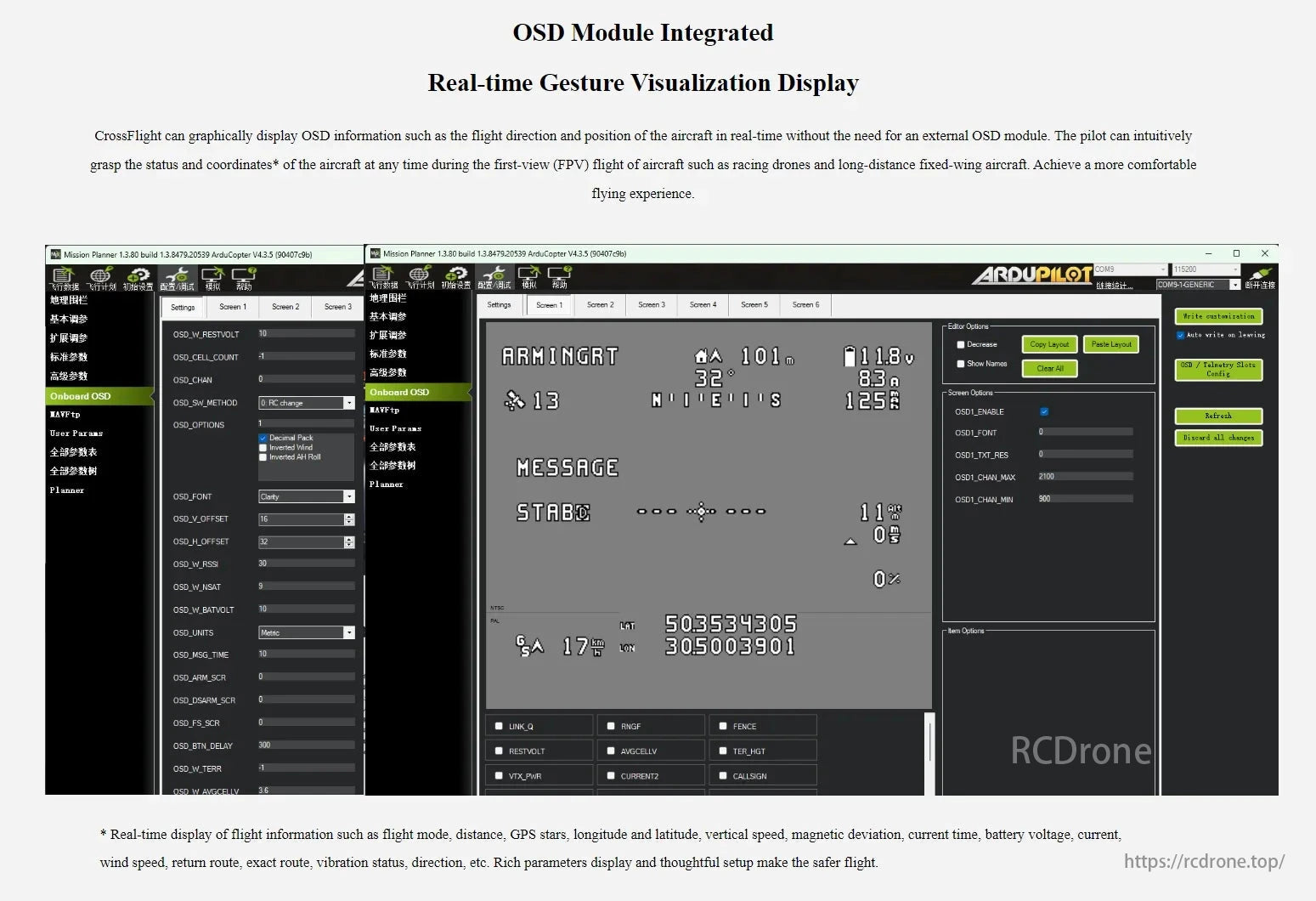
O CrossFlight fornece dados de voo em tempo real, incluindo direção, posição, estado e coordenadas para voos FPV, melhorando a experiência do piloto com informações detalhadas.
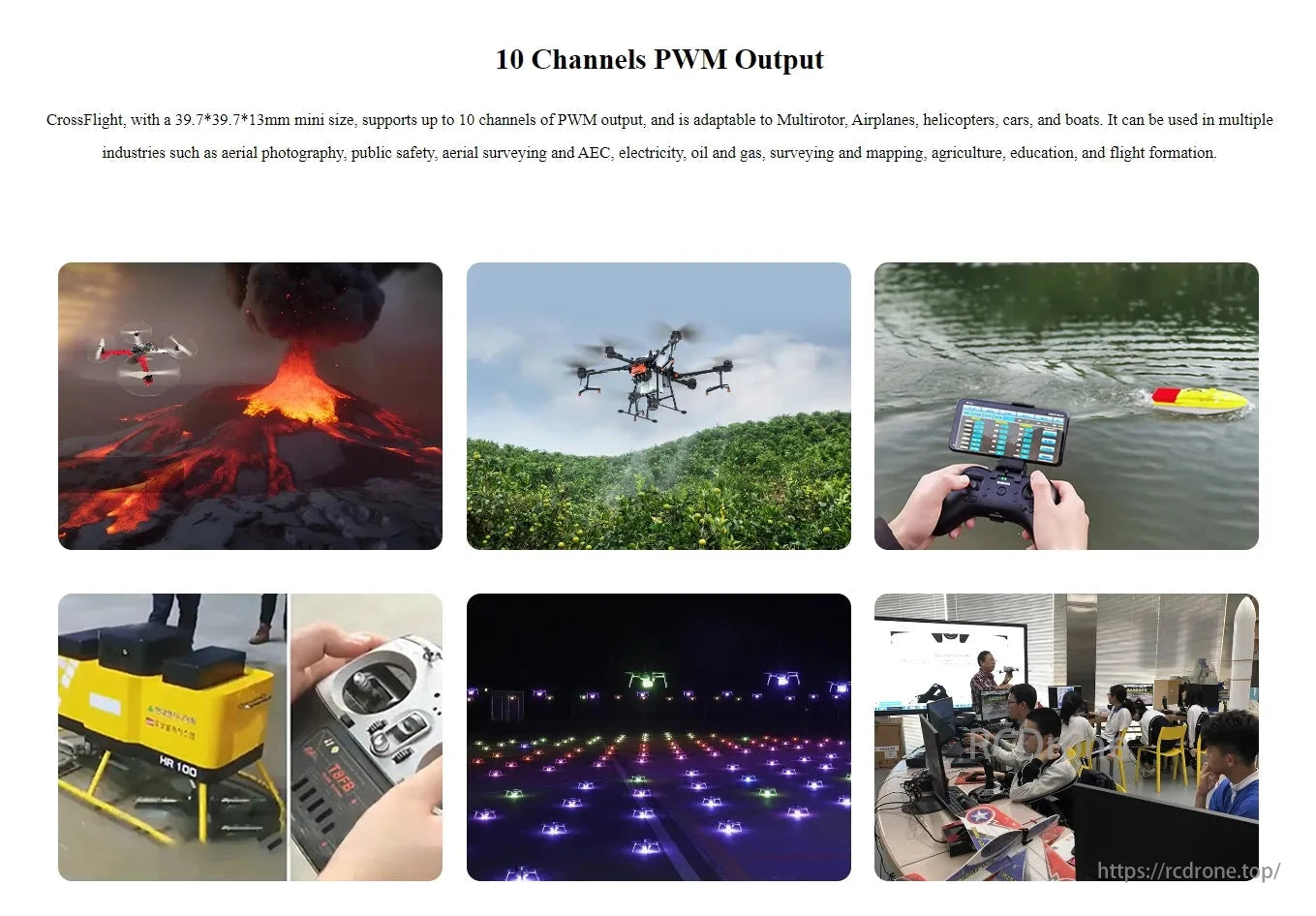
O CrossFlight é um controlador de voo compacto de 39,7×39,7×13mm com até 10 saídas PWM. Funciona para multirotores, aviões, helicópteros, carros e barcos. Utilize-o em fotografia aérea, segurança pública, levantamento, AEC, energia, agricultura, educação e voos em formação. Aplica-se ao monitoramento de vulcões, pulverização de culturas, controlo de barcos, operações em solo, formações de drones noturnas e aprendizagem em sala de aula.

Tamanho mini como o F4, dimensões 39,7x39,7x13mm. Elimina interfaces redundantes e simplifica a instalação. O peso total com cabos é de 54g, reduzindo o peso geral da máquina para um tempo de voo prolongado. Ideal para drones de fotografia aérea pequenos e de alta velocidade utilizados em esqui acrobático e vídeos promocionais de supercarros. O controlador de voo RadioLink CrossFlight V1.0 pesa aproximadamente 39g, oferecendo um design compacto para um desempenho eficiente em várias aplicações.
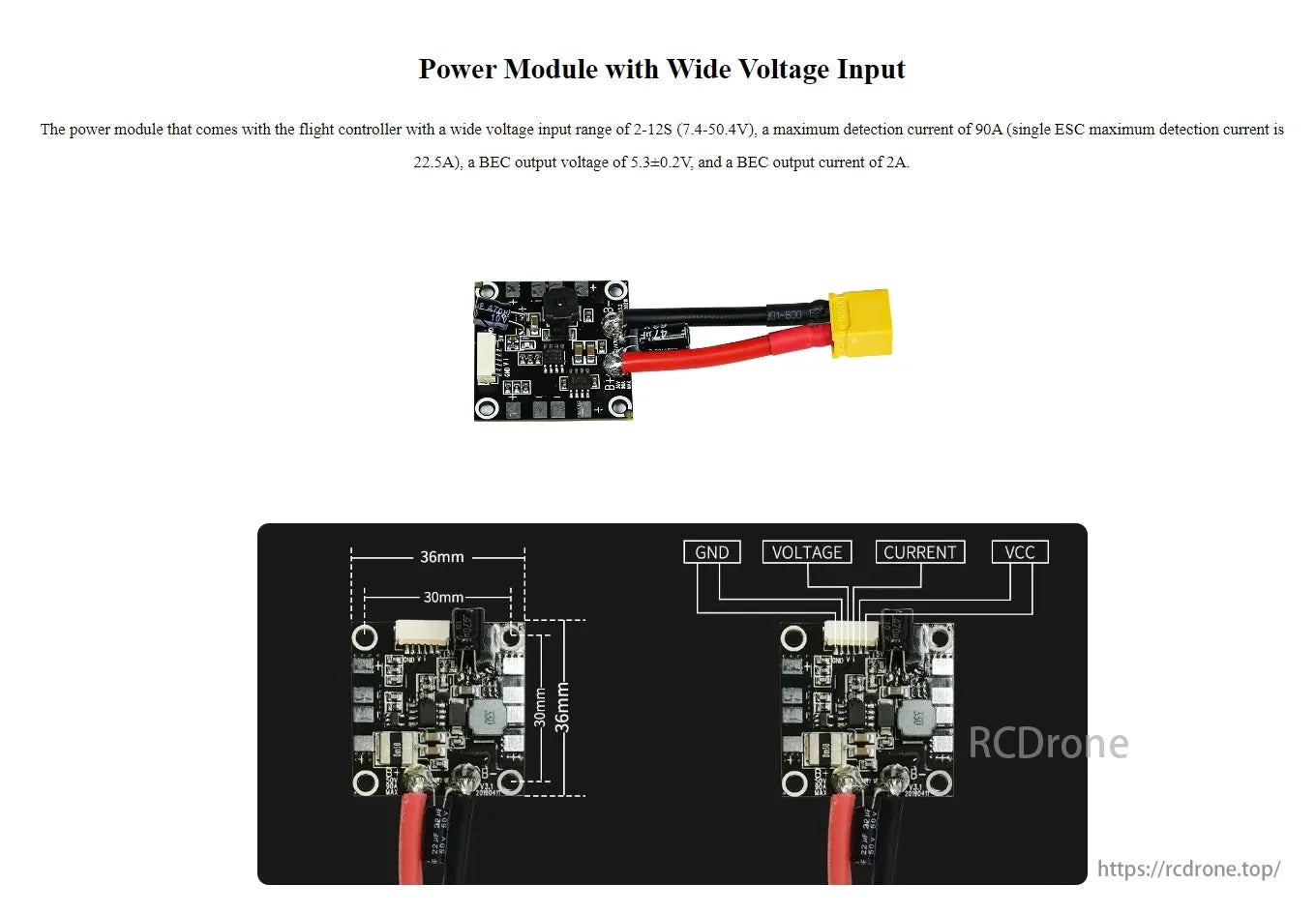
Módulo de Potência com Entrada de Tensão Ampla. Suporta 2-12S (7.4-50.4V), corrente de deteção máxima de 90A, saída BEC 5.3±0.2V, 2A. Dimensões: 36mm x 30mm. Conecta GND, TENSÃO, CORRENTE, VCC.
A Garantia de Uso assegura uma fácil instalação e configuração de parâmetros para vários modelos. Orientação abrangente, incluindo ajuste PID e visualização de registos, está disponível em plataformas oficiais como Facebook, YouTube e Instagram.
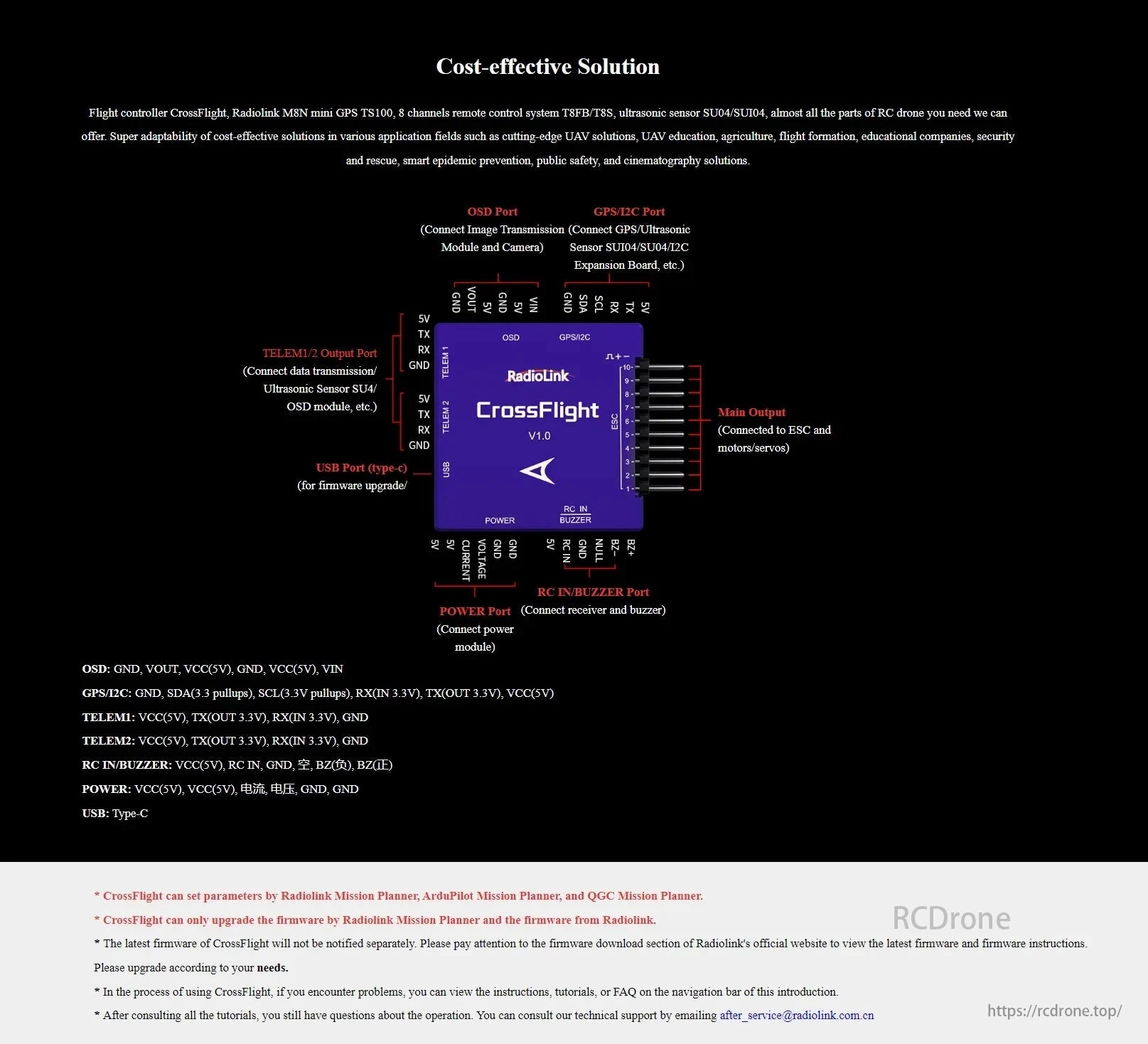
O Controlador de Voo RadioLink CrossFlight oferece soluções económicas para drones RC. As características incluem GPS, portas de telemetria, USB para actualizações de firmware e conexões para ESCs, servos e sensores. Suporta várias aplicações como educação em UAV e segurança.
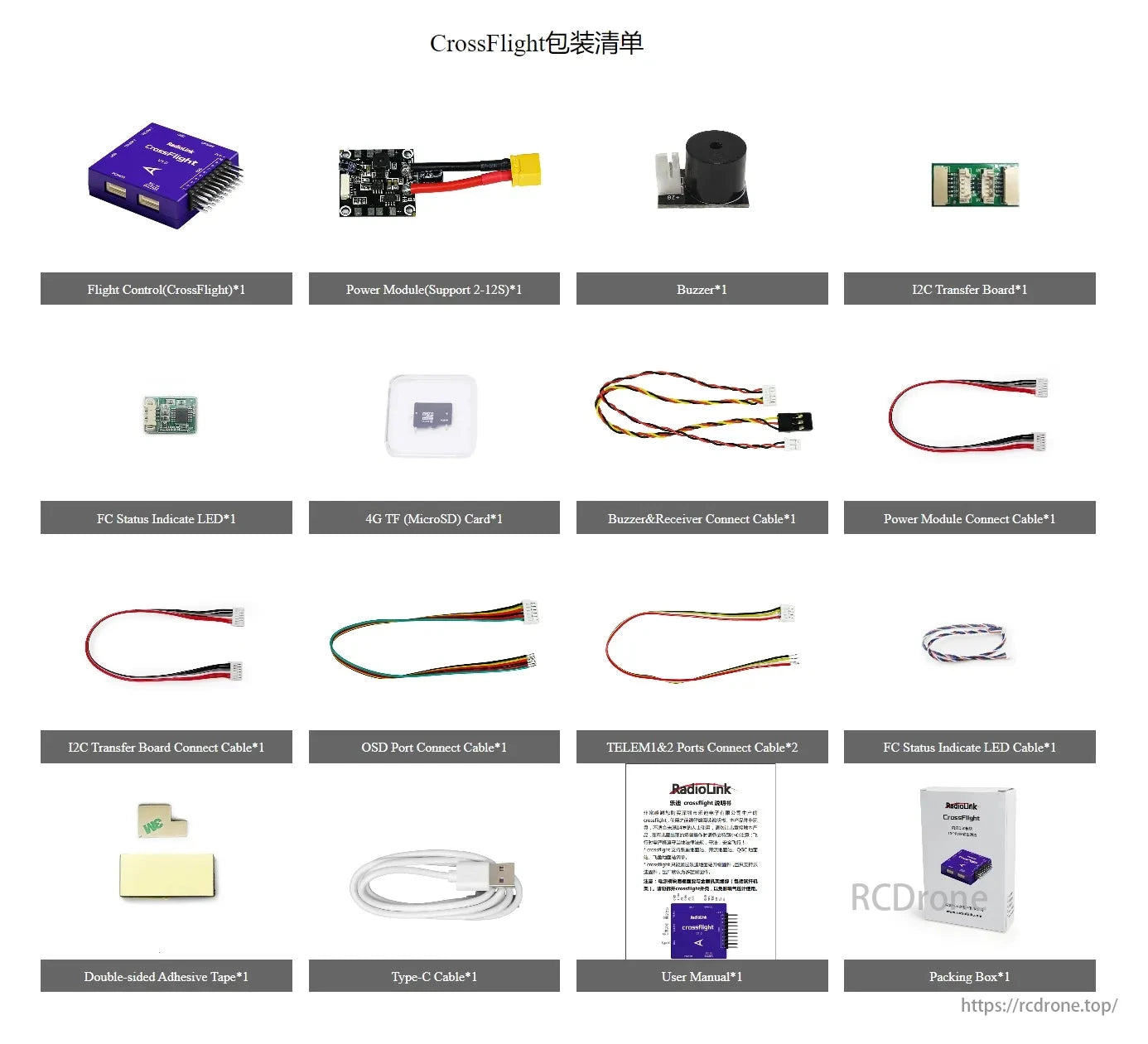
O pacote CrossFlight inclui: Controlo de Voo, Módulo de Alimentação, Buzzer, Placa de Transferência I2C, LED de Estado do FC, Cartão TF 4G, Cabos de Conexão (Buzzer&Receptor, Módulo de Alimentação, Transferência I2C, Porta OSD, Portas TELEM1&2), Fita Dupla Face, Cabo Tipo-C, Manual do Utilizador, Caixa de Embalagem.
Related Collections



