RCDrone T5001-10 & TS5001-10 Motor de Servo Articulado Brushless 1N.m FOC Encoder Duplo RS485/CAN 1:10 Atuador de Engrenagem Robótica
RCDrone T5001-10 & TS5001-10 Motor de Servo Articulado Brushless 1N.m FOC Encoder Duplo RS485/CAN 1:10 Atuador de Engrenagem Robótica
RCDrone
Não foi possível carregar a disponibilidade de recolha
Visão Geral
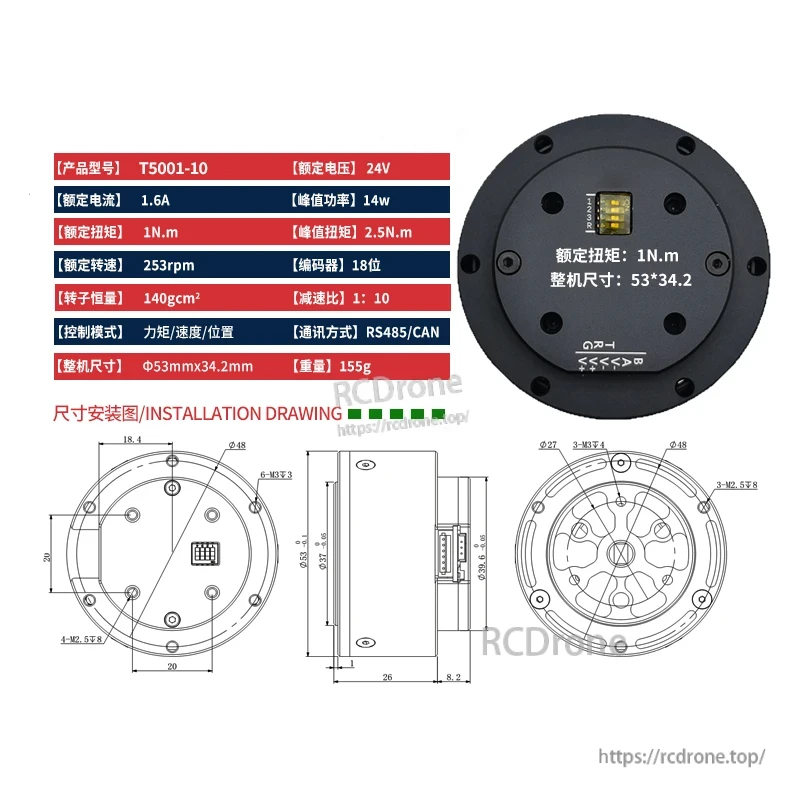
Os RCDrone T5001-10 e TS5001-10 são motores de módulo de junta servo brushless de alto desempenho e compactos MIT drive projetados para aplicações robóticas avançadas. Com um torque nominal de 1N·m, torque de pico de 2.5N·m, velocidade nominal de 253–255 rpm, e redução de engrenagem planetária de 1:10, estes módulos servo oferecem alta potência, grande torque e alta precisão num formato leve. Equipados com um encoder absoluto dual de 18 bits (T5001-10) ou 18 bits + 14 bits (TS5001-10), fornecem feedback de posição preciso com calibração única e definição de ponto zero. A comunicação é suportada através da interface RS485/CAN, garantindo transmissão de dados fiável para sistemas de controlo robótico.
Características Principais
-
Feedback de Alta Precisão – Design de encoder de 18 bits ou duplo para controlo de movimento preciso.
-
Alta Densidade de Torque – Torque nominal de 1N·m, torque de pico de 2.5N·m, caixa compacta de Φ53mm.
-
Controlo FOC – Controlo Orientado a Campo para operação suave e eficiente.
-
Múltiplos Modos de Controlo – Controlo de torque, velocidade e posição.
-
Comunicação de Grau Industrial – RS485/CAN com suporte UART para integração flexível.
-
Construção Durável – Projetado para robótica, garantindo estabilidade em operação a longo prazo.
-
Leve & Compacto – Apenas 155g (T5001-10) ou 183g (TS5001-10), ideal para designs com espaço limitado.
Especificações Técnicas
| Modelo | T5001-10 | TS5001-10 |
|---|---|---|
| Tensão Nominal | 24V | 24V |
| Corrente Nominal | 1.6A | 1.6A |
| Poder de Pico | 14W | 14W |
| Torque Nominal | 1N·m | 1N·m |
| Torque de Pico | 2.5N·m | 2.5N·m |
| Velocidade Nominal | 253rpm | 255rpm |
| Encoder | 18 bits absoluto | 18 bits + 14 bits absoluto |
| Inércia do Rotor | 140g·cm² | 140g·cm² |
| Relação de Transmissão | 1:10 planetário | 1:10 planetário |
| Modos de Controlo | Torque / Velocidade / Posição | Torque / Velocidade / Posição |
| Comunicação | RS485 / CAN | RS485 / CAN |
| Dimensões | Φ53 × 34.2mm | Φ53 × 36mm |
| Peso | 155g | 183g |
Definição da Interface
| Pino | Função |
|---|---|
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| V- | Fonte de Alimentação Negativa |
| V+ | Fonte de Alimentação Positiva |
| T | Transmissor UART |
| R | Receptor UART |
| G | GND de Sinal |
Aplicações
-
Robôs com Pernas – Controlo de movimento estável para quadrúpedes e humanoides.
-
Robôs Industriais – Juntas servo de alta precisão para braços robóticos.
-
Robôs de Patrulha – Unidades de tração fiáveis para plataformas móveis autónomas.
-
Robôs Médicos – Leves e precisos para exoesqueletos e dispositivos de reabilitação.
Detalhes



Related Collections