




ROBOTERA XHAND 1 Mão Robótica - 12 DoF, pontas táteis 270°, força de preensão 80N, elevação 25 Kg, EtherCAT/RS485, compatível com ROS
ROBOTERA XHAND 1 Mão Robótica - 12 DoF, pontas táteis 270°, força de preensão 80N, elevação 25 Kg, EtherCAT/RS485, compatível com ROS
ROBOTERA
Não foi possível carregar a disponibilidade de recolha
Visão Geral
ROBOTERA XHAND 1 é uma mão robótica de cinco dedos com módulos de junta de acionamento direto completos e 12 DoF ativos. A mão tem o tamanho de uma mão humana (191 mm x 94 mm x 47 mm) e foi projetada para manipulação destroça com sensoriamento tátil de alta resolução, força de agarre robusta e interfaces amigáveis para desenvolvedores para pesquisa e integração em robótica.
Principais Características
- Arquitetura de acionamento direto completo com módulos de junta controlados por força e acionados por engrenagens integradas (3 no polegar; 9 nos outros quatro dedos).
- 12 DoF totalmente ativos; movimento lateral do dedo indicador de +/-15° para manipulação complexa na mão.
- Alto desempenho de agarre: força na ponta do dedo 15N; força máxima de agarre 80N; peso máximo de agarrar até 25 Kg (palma para cima) e 16 Kg (palma para a esquerda).
- Atuação de alta velocidade suportando >2Hz de repetição de abertura/fechamento; demonstrou cliques de dedo de até 10 CPS (Cliques Por Segundo).
- 270° cobertura tátil na ponta dos dedos com cinco sensores de matriz tátil tridimensionais; resolução total da mão 12x10 por ponta do dedo x 5.
- Sensoriamento de força tridimensional incluindo forças tangenciais (X e Y); precisão de reposicionamento da ponta do dedo +/-0.20 mm.
- Reversível com amortecimento <= 0.1 Nm; controlo de força em laço de corrente e controlo de força-posição para interação conformável.
- Conectividade amigável para desenvolvedores: EtherCAT e RS485 (USB); compatível com ROS1/ROS2, Ubuntu (Linux), arquiteturas x86 e ARM, TwinCAT, e braços robóticos comuns (incluindo xARM, Realman, UR).
- Durabilidade avaliada para 1.000.000 ciclos de aperto sem carga; temperatura de operação -20°C ~ 60°C.
Para consultas, suporte de integração ou compras em grande quantidade, entre em contato [email protected] or visite https://rcdrone.top/.
Especificações
| Parâmetro | Valor |
|---|---|
| Peso | 1100 g |
| Dimensões (C x L x A) | 191 mm x 94 mm x 47 mm (O tamanho da mão de um adulto) |
| DoF Ativo (Total) | 12 |
| DoF Passivo (Total) | 0 |
| Atribuição de DoF | Polegar x 3; Dedo Indicador x 3; Dedo Médio x 2; Dedo Anelar x 2; Dedo Mínimo x 2 |
| Atuação/Transmissão do Polegar | Módulo de junta controlada por força com 3 engrenagens |
| Atuação/Transmissão de Quatro Dedos | Módulo de junta controlada por força com 9 engrenagens |
| Configuração da Ponta do Dedo | Pontas de Dedo Redondas ou Arredondadas |
| Oscilação Lateral | -15°~+15° (Indicador) |
| Precisão de Posicionamento por Repetição na Ponta dos Dedos | +/− 0.20 mm |
| Modos de Controlo | Controlo de posição (baixa amortecimento/alto amortecimento), controlo de força em laço de corrente, controlo de força-posição |
| Força na Ponta dos Dedos | 15N |
| Força Máxima de Aperto (mão inteira) | 80N |
| Peso Máximo de Agarre (palma esquerda) | 16 Kg |
| Peso Máximo de Agarre (palma para cima) | 25 Kg |
| Oposição Máxima do Polegar | Pequeno Dedo |
| Velocidade de Repetição de Abertura/Fecho | >2Hz |
| Amortecimento de Retorno (Retornável) | <= 0.1 Nm |
| Cobertura Táctil | Encirclement de cinco dedos a 270° |
| Número de Sensores Tácteis | Cinco sensores de matriz tátil tridimensional a 270° nos cinco dedos |
| Resolução Táctil (mão inteira) | 12x10 (encirclement de 270° por dedo) x 5 |
| Dimensões de Sensoriamento Táctil | Deteção de força tridimensional (Incluindo forças tangenciais X e Y) |
| Frequência de Controlo da Mão Inteira | 83Hz |
| Taxa de Comunicação | EtherCAT: 100MHz; RS485: 3MHz |
| Parâmetros de Sensoriamento | Pontas dos dedos: 120 forças de perfilagem tridimensional; Juntas: posição, velocidade, temperatura, corrente (torque) |
| Parâmetros de Controlo | Posição da junta; torque da junta; coeficiente de rigidez da junta; coeficiente de amortecimento da junta |
| Ciclos de Apreensão sem Carga | 1.000.000 ciclos |
| Faixa de Temperatura de Operação | -20°C ~ 60°C |
| Tensão de Trabalho | 24V ~ 72V |
| Corrente Estática | 0.15A @48V, 7W |
| Corrente Máxima | 2.5A @48V, 120W |
| Interface de Comunicação | RS485 (USB), EtherCAT |
Aplicações
- Teleoperação: suporta teleoperação MR e com luvas; teleoperação Vision Pro; Luvas Manus; Pico/Meta Quest.
- Integração de braço robótico e humanoide: compatível com xARM, Realman, UR e outros braços robóticos.
- Pesquisa e simulação: URDF preciso, simulação de sensoriamento tátil; adequado para aprendizado por reforço com Isaac Gym e Mujoco.
- Interação homem-máquina e operação de ferramentas humanas com controle de força compatível.
Manuais
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
Detalhes

ROBOTERA XHAND1 mão robótica com acionamento direto total, oferecendo verdadeira liberdade e destreza avançada.

XHAND1 da ROBOTERA: mão humanoide de cinco dedos com 12 graus de liberdade, sensores táteis de 270° por ponta de dedo, força de aperto de 80N, capacidade de carga de 25kg. Projetada para tarefas complexas e manuseio de ferramentas.

XHAND 1: Primeira mão destroçada com módulos de acionamento direto por junta. Apresenta motores sem fio de alta potência, redutores de baixa amortecimento, codificadores de precisão e módulos de junta integrados desenvolvidos internamente para manipulação robótica avançada.
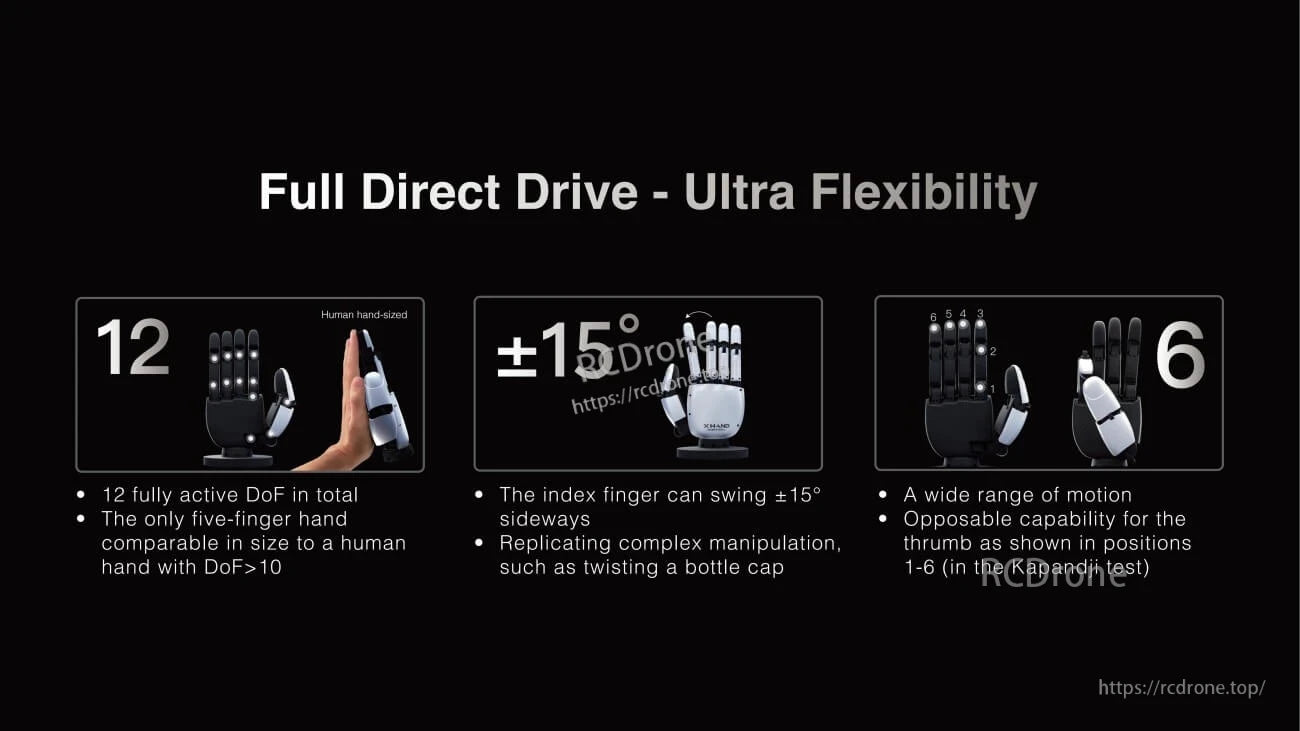
ROBOTERA XHAND 1 é uma mão robótica ultra-flexível, de tamanho humano, com 12 DoF ativos. O dedo indicador oscila ±15° lateralmente para tarefas complexas, e o polegar oferece seis posições opostas para manipulação versátil.

ROBOTERA XHAND 1: carga de 25kg, força de aperto de 80N, acionamento direto completo, supera soluções semelhantes baseadas em ligação/tendão.

A mão robótica de acionamento direto completo atinge 10 CPS com velocidade acionada por engrenagem, torque superior a 1 Nm, superando sistemas de ligação e tendão para um desempenho de jogo superior.

ROBOTERA XHAND 1 possui sensores de ponta dos dedos de 270° com >100 pontos e precisão de 0.05 N para detecção de força 3D, tátil e de temperatura, garantindo um desempenho de aperto superior.
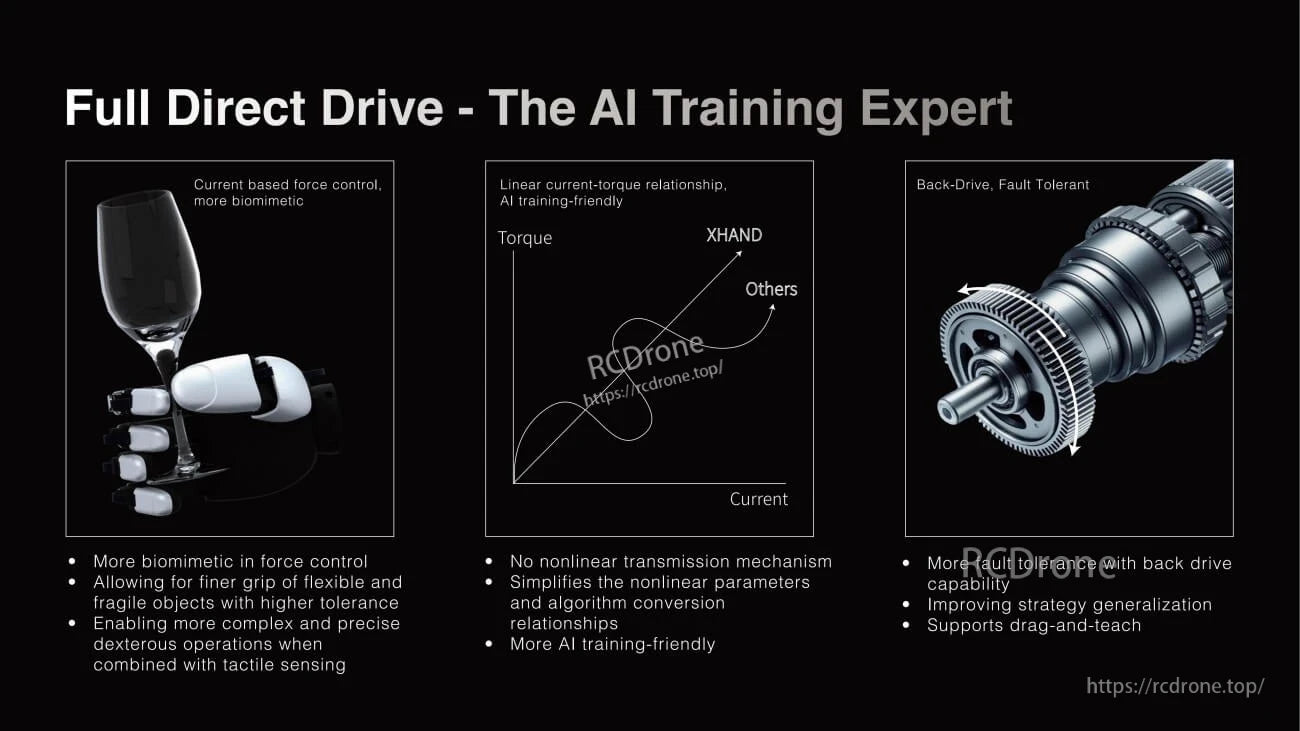
ROBOTERA XHAND 1 oferece controle de força biomimético, resposta linear de torque-corrente para treinamento de IA, e tolerância a falhas de retroalimentação—permitindo manuseio preciso, algoritmos simplificados, suporte de arrastar e ensinar, e melhoria na generalização de estratégias.
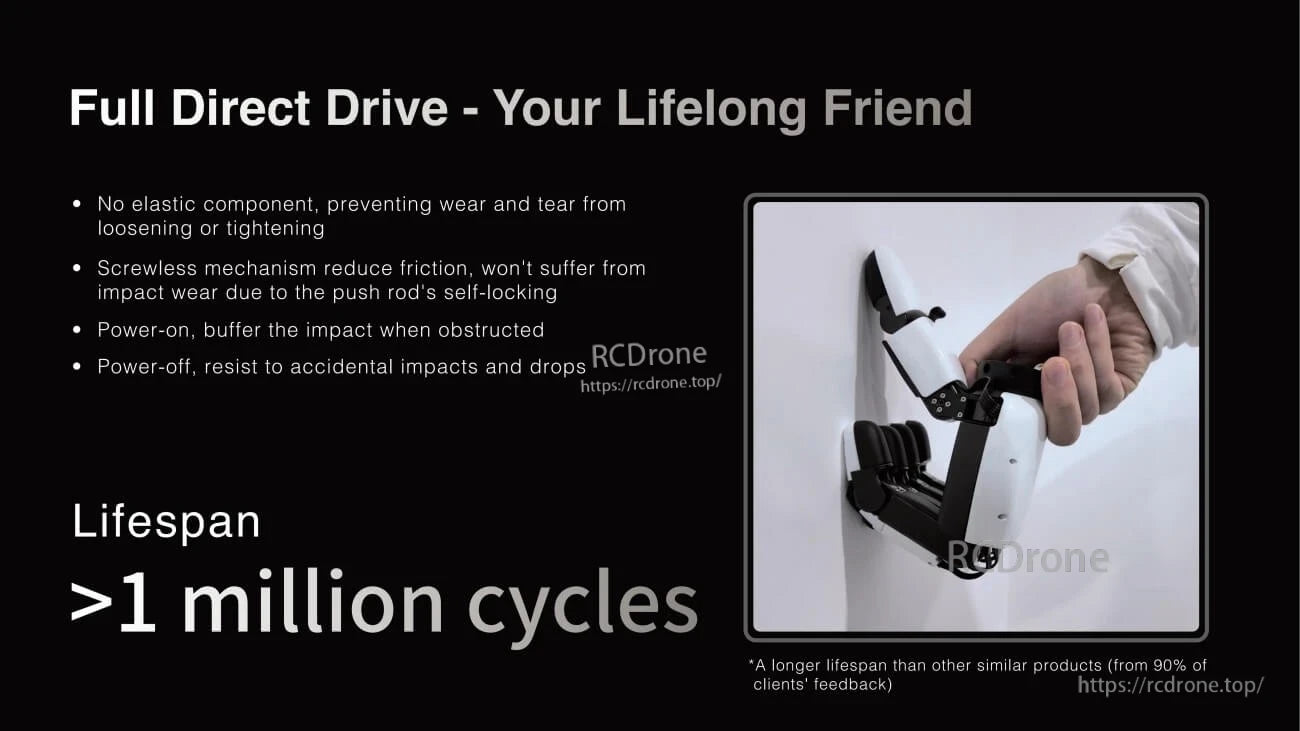
A mão robótica de acionamento direto completo oferece durabilidade sem peças elásticas ou parafusos, amortecimento de impacto quando ligada, resistência a quedas quando desligada e uma vida útil superior a um milhão de ciclos—superando produtos semelhantes de acordo com o feedback dos clientes.

ROBOTERA XHAND 1 suporta teleoperação MR e com luva, compatível com ROS1/ROS2 e Ubuntu em x64/ARM. Apresenta EtherCAT/TwinCAT/RS485 para integração com braços robóticos xARM, Realman, UR. Oferece modelagem URDF precisa e simulação de sensoriamento tátil. Projetado para aplicações robóticas amigáveis para desenvolvedores, com flexibilidade multiplataforma e protocolos de controle avançados.
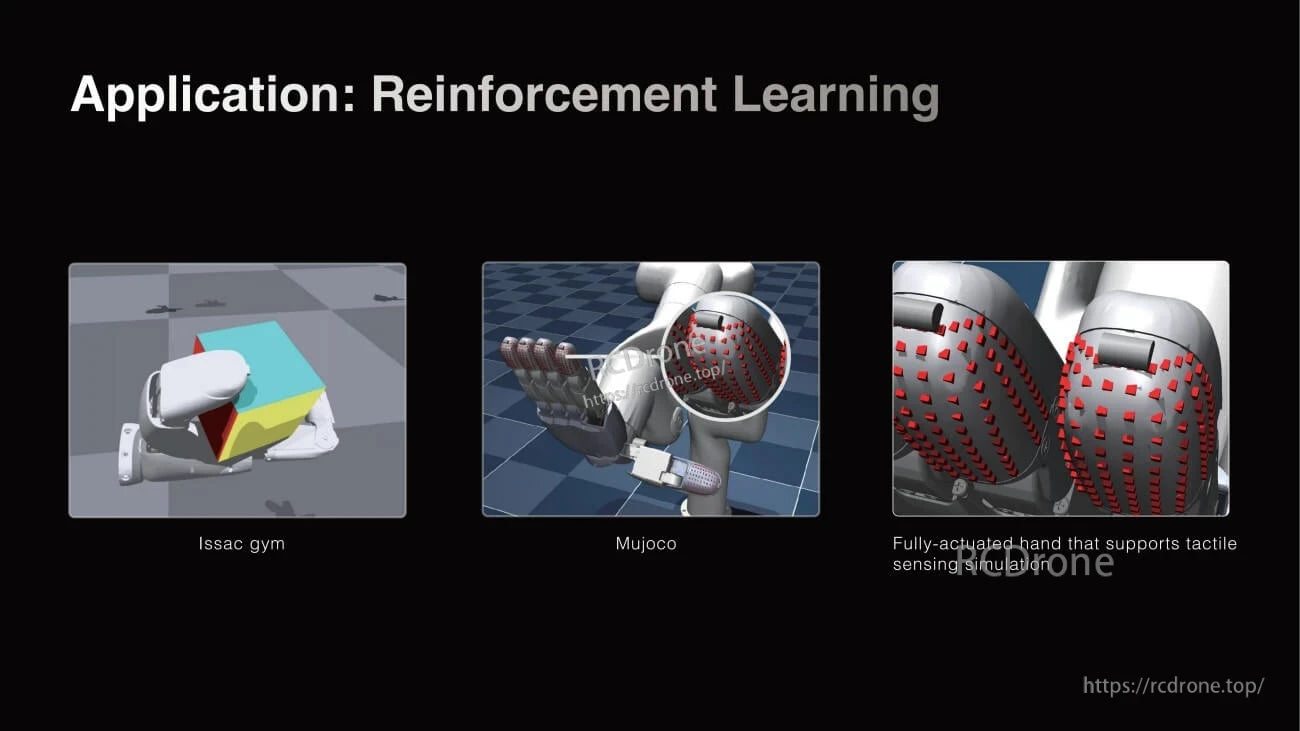
Aplicações de aprendizado por reforço: Issac gym, Mujoco, e mão totalmente atuada com simulação de sensoriamento tátil para controle robótico avançado e ambientes de treinamento.
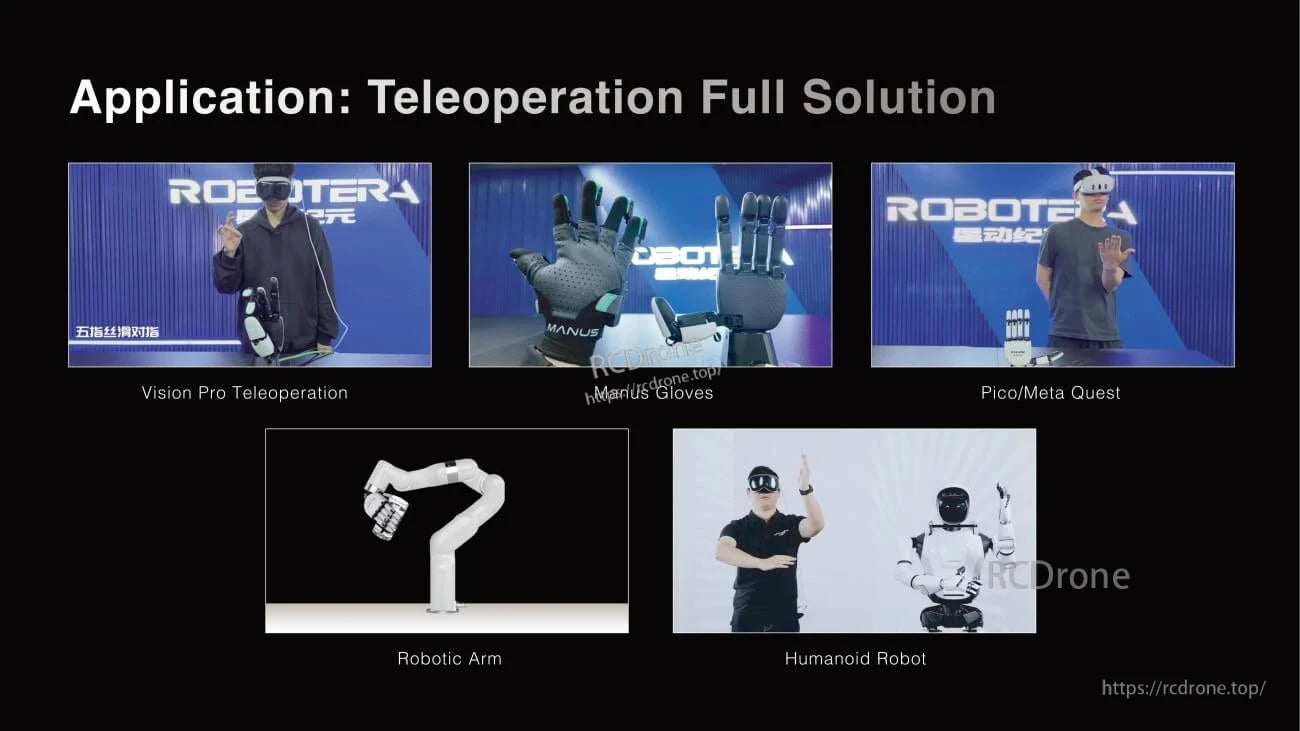
Solução completa de teleoperação com Vision Pro, Manus Gloves, Pico/Meta Quest, braço robótico e robô humanoide para controlo remoto avançado.
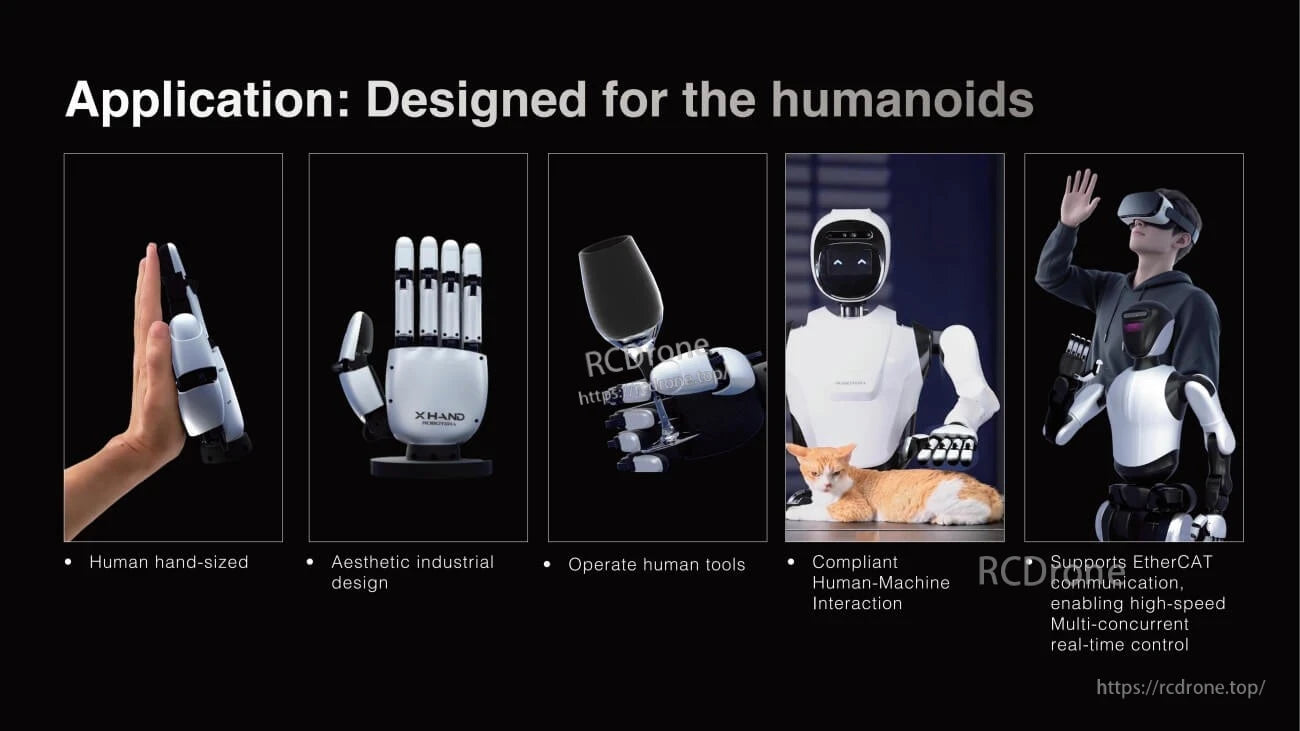
Mão robótica de tamanho humano com design estético, opera ferramentas, permite interação compatível, suporta EtherCAT para controlo em tempo real.
Related Collections




