



Drone programável S2-F290 - Pixwawk Open Source ROS SLAM AI nível industrial de desenvolvimento secundário para desafio de drone
Drone programável S2-F290 - Pixwawk Open Source ROS SLAM AI nível industrial de desenvolvimento secundário para desafio de drone
RCDrone
Não foi possível carregar a disponibilidade de recolha
Visão geral
O Drone programável S2-F290 é um de alto desempenho drone de nível industrial projetado para desenvolvimento secundário e desafios de drones. Apresentando um capacidade de carga útil de 2400g, um Bateria 6S 6000mAh, e um distância máxima de controle de 10KM, ele oferece precisão com Precisão de posicionamento GPS de ≈1–2m e resistência ao vento de nível 3–4. Desenvolvido por Controlador de voo Pixhawk 2.4.8 com tecnologia ROS SLAM de código aberto, o drone suporta funções avançadas como Mapeamento 3D LiDAR, reconhecimento de objetos baseado em YOLO e voo em formação. Isso é Quadro de fibra de carbono de 3 mm garante durabilidade e estabilidade excepcionais, testadas em condições extremas. A plataforma é altamente personalizável, oferecendo recursos como suporte para estação terrestre QGC em chinês/inglês, expansibilidade modular e tutoriais abrangentes, tornando-a ideal para aplicações de pesquisa, competição e desenvolvimento.
Especificação
Aeronave
| Parâmetro | Especificação |
|---|---|
| Nome | Drone programável S2-F290 |
| Peso da carga útil | 2400g |
| Modelo | S2-F290 |
| Precisão de posicionamento GPS | ≈1–2m |
| Distância entre eixos | 290 mm |
| Peso máximo de decolagem | 3190g |
| Bateria | Bateria padrão 6S 6000mAh |
| Distância de controle | 10KM (Recomendado dentro de 1000m) |
| Resistência ao vento | Nível 3–4 |
| Ambiente operacional | Interior/Exterior |
| Resultados do teste de resistência | Detalhes |
|---|---|
| Hélices | 7 polegadas |
| Capacidade da bateria | 6S 6000mAh (5300mAh usado) |
| Ambiente | Sem vento |
| Tempo de voo | 11 minutos e 30 segundos |
Controlador de voo
| Componente | Especificação |
|---|---|
| Processador FMU | STM32H743 Cortex-M7, 480MHz, 2MB Flash, 1MB SRAM |
| Processador IO | STM32F103 Cortex-M3, 72MHz, 64KB SRAM |
| Sensores | Acelerômetro/Giroscópio: ICM-42688-P |
| Acelerômetro/Giroscópio: BMI055 | |
| Magnetômetro: IST8310 | |
| Barômetro: MS5611 | |
| Tensão nominal | Tensão máxima de entrada: 6V |
| Entrada de energia USB: 4,75-5,25 V | |
| Entrada do servo: 0-36V | |
| Corrente nominal | Telemetria 1 Corrente máxima de saída: 1A |
| Corrente combinada para outras portas: 1A | |
| Dados Mecânicos | Dimensões: 53,3 × 39 × 16,2 mm |
| Peso: 39.2g | |
| Portos | - 14 saídas PWM (8 de IO, 6 de FMU) |
| - 2 portas seriais de uso geral | |
| - 2 portas GPS | |
| - 1 porta I2C | |
| - 2 portas CAN | |
| - Entrada RC para Spektrum/DSM, S.BUS, CPPM, etc. | |
| - Porta de entrada de energia | |
| Outras características | Temperatura de operação: -40–85°C |
Computador de bordo
| Componente | Especificação |
|---|---|
| Poder de computação | 40 TOPS |
| GPU | 32 núcleos tensores com GPU NVIDIA Ampere de 1024 núcleos |
| CPU | 6 núcleos Arm Cortex-A78AE v8.2 64 bits, 1,5 GHz |
| BATER | 8 GB LPDDR5 de 128 bits 68 GB/s |
| Armazenar | Cartão SD ou NVMe externo |
| Frequência máxima da CPU | 1,5 GHz |
Controle remoto
| Componente | Especificação |
|---|---|
| Tensão de operação | 4,2 V |
| Corrente de operação | 100mA |
| Banda de frequência | 2,4–2,483 GHz |
| Peso | 525g |
| Dimensões | 130 × 150 × 20 mm |
| Duração da bateria | 20 horas |
| Porta de carregamento | MICRO-USB |
| Faixa de controle | 7 KM |
GPS
| Componente | Especificação |
|---|---|
| Receptor de satélite | UBLOX-M9, 92 canais |
| Bússola eletrônica | QMC5883L |
| Sistemas de satélite | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| Canais de satélite | 32 |
| Taxa de atualização | 25Hz |
| Precisão de posicionamento | 1,5 m CEP (ambiente ideal) |
| Tempo de inicialização | Partida a frio: 24s, Partida a quente: 1s |
| Dimensões | 25 × 25 × 8 mm |
| Peso | 12g |
Bateria
| Componente | Especificação |
|---|---|
| Tipo de conector | XT60 |
| Corrente de carga recomendada | 3–5A |
| Capacidade da bateria | 6000mAh |
| Tensão nominal | 22.2V |
| Taxa de descarga | 75°C |
| Dimensões | 50 × 44 × 158 mm |
| Peso | 816g |
LiDAR
| Componente | Especificação |
|---|---|
| Comprimento de onda do laser | 905 nm |
| Faixa | 40m @ 10% de refletividade, 70m @ 80% de refletividade |
| Área mínima de detecção | 0,1 m |
| Campo de visão | Horizontal: 360°, Vertical: -7° a 52° |
| Saída de Nuvem de Pontos | 200.000 pontos/segundo |
| Taxa de pontos | 10Hz |
| Nível de proteção | IP67 |
| Poder | 6,5 W (ambiente de 25 °C) |
| Faixa de voltagem | 9–27 V CC |
| Dimensões | 65 × 65 × 60 mm |
| Peso | 265g |
Câmera de profundidade
| Componente | Especificação |
|---|---|
| Tecnologia de profundidade | Infravermelho duplo |
| Ângulo de visão de profundidade | 87° × 58° (Horizontal × Vertical) |
| Resolução de profundidade | 1280 × 720 |
| Precisão de profundidade | <2% em 2m |
| Taxa de quadros de profundidade | 90 fps |
| Alcance de profundidade | 0,3–3m |
| Dimensões | 90 × 25 × 25 mm |
| Ambiente operacional | Interior/Exterior |
Câmera de lente única
| Componente | Especificação |
|---|---|
| Resolução Máxima | 2MP (1920 × 1080) |
| Taxa máxima de quadros | 30 fps |
| Campo de visão | ~90° |
| Comprimento do cabo | ~1.5m |
| Dimensões | 35 × 35 × 30 mm |
Tabela de funções
| unção | Configuração básica | Opcional D435 | Módulo opcional D435 + 4G |
|---|---|---|---|
| Manter altitude, pairar, retornar para casa | ✔ | ✔ | ✔ |
| Aterrissagem, estabilização, voo de ponto de passagem | ✔ | ✔ | ✔ |
| Voo de controle remoto | ✔ | ✔ | ✔ |
| Comunicação entre o controlador de voo e o computador de bordo | ✔ | ✔ | ✔ |
| Reconhecimento e aterrissagem de código QR | ✔ | ✔ | ✔ |
| Reconhecimento e descarte de objetos | ✔ | ✔ | ✔ |
| Mapeamento simultâneo e prevenção de obstáculos | ✔ | ✔ | ✔ |
| Mapeamento e posicionamento 3D LiDAR | ✔ | ✔ | ✔ |
| Reconhecimento de objetos baseado em YOLO | ✘ | ✔ | ✔ |
| Reconhecimento e rastreamento de objetos | ✘ | ✔ | ✔ |
| Controle remoto 4G | ✘ | ✘ | ✔ |
O pacote inclui
Configuração básica
- Quadro: Quadro de fibra de carbono F290
- Motores: 4× Motor T F100 Kv1100
- ESC: 4× FlyFun T-rex 5 45A
- Hélices: 4× Hélices Tri-Blade de 7 polegadas
- Controlador de voo: Pixhawk6mini
- Bateria: Bateria padrão 6S 6000mAh
- Carregador: Carregador de bateria 6S
- Computador de bordo: Módulo Jetson Orin Nano 8G + WIFI
- SSD: 256G
- LiDAR: Livox MID360
- Câmera: Câmera USB grande angular de 150°
- Controle remoto: Cloud T10 (inclui receptor de dados)
Configuração opcional: D435
Inclui todos os componentes do Configuração básica, mais:
- Câmera de lente dupla: D435
Configuração opcional: D435 + Módulo 4G
Inclui todos os componentes do Básico Configuração, mais:
- Câmera de lente dupla: D435
- Módulo 4G
Detalhes
Drone programável S2-F290
- ✔ Suporte técnico, serviço pós-venda sem complicações
- ✔ Fornece exemplos de competição, personalizáveis
- ✔ Estação terrestre móvel chinesa/inglesa
- ✔ Alta estabilidade, alto desempenho
- ✔ Interior/Exterior
O S2-F290 é um drone de última geração, desenvolvido especialmente para corridas de drones, especializado em exploração e inovação.Projetado para integrar tecnologia avançada e criatividade ilimitada, ele é capaz de se adaptar a vários ambientes complexos, tornando a exploração aérea mais acessível e eficaz.
Este drone apresenta um design compacto com imensa potência. Ele oferece uma riqueza de exemplos de competição, permitindo que os usuários dominem e otimizem rapidamente seu desempenho. Equipado com uma estação terrestre móvel dedicada em chinês/inglês, ele aprimora muito a conveniência da operação do drone. Além disso, ele fornece explicações de código-fonte competitivo e personalização para garantir que os usuários possam atingir suas funcionalidades desejadas no menor tempo possível, ao mesmo tempo em que se destacam em cenários competitivos.

Atendendo às necessidades de desenvolvimento/competição/pesquisa
| Categoria | Detalhes |
|---|---|
| Conhecimento básico de ROS | - Controle remoto |
| - Comunicação entre o controlador de voo e o computador de bordo | |
| Funções básicas | - Planejamento de Rotas |
| - Reconhecimento e posicionamento de QR Code | |
| - Patrulha Autônoma Offboard | |
| Funções avançadas | - Reconhecimento de QR Code para Landing |
| - Reconhecimento e Queda de Objetos | |
| - Mapeamento simultâneo e prevenção de obstáculos | |
| - Mapeamento e posicionamento 3D LiDAR | |
| - Reconhecimento de objetos baseado em YOLO | |
| - Transmissão de vídeo baseada na Web | |
| - Voo em formação ao ar livre | |
| - Formação Colaborativa Terra-Ar | |
| Funções opcionais da câmera D435 | - Posicionamento Visual VINS |
| - Reconhecimento e rastreamento de objetos baseado em YOLO | |
| Funções de comunicação 4G opcionais | - Controle remoto 4G |
Prevenção autônoma de obstáculos, garantia de segurança abrangente
Utilizando 3D LiDAR para evitar obstáculos de forma autônoma, o drone combina planejamento global de rota com evitar obstáculos dinâmicos locais para detectar obstáculos de todas as direções com precisão. Ele suporta parada automática, bem como voo contínuo, permitindo evitar objetos de forma flexível ao longo da trajetória de voo, garantindo uma experiência de voo mais segura.

Reconhecimento e Landing de QR Code
O drone ativa a câmera e o módulo de reconhecimento de QR code para adquirir as informações posicionais em tempo real do QR code. Durante a descida, o drone ajusta dinamicamente sua posição, garantindo alinhamento preciso com o campo de visão da câmera antes de prosseguir para o pouso.
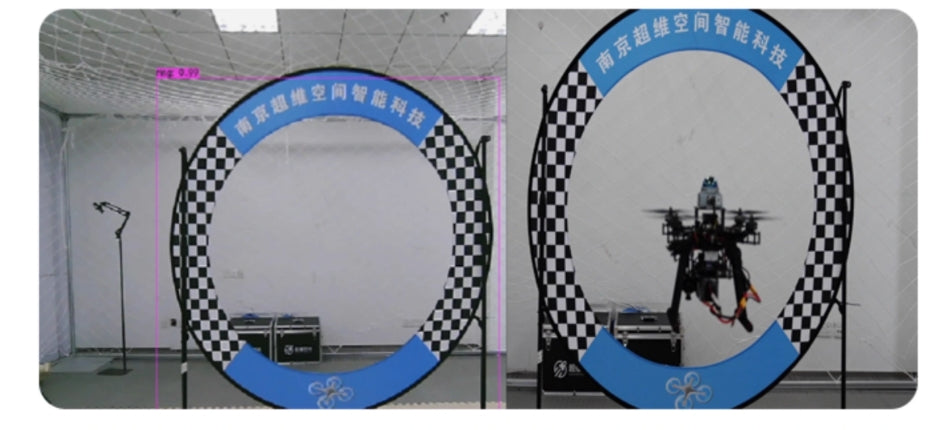
Reconhecimento de Objetos YOLO
O drone usa YOLOv8 para reconhecimento de objetos, adquirindo as informações posicionais do quadro circular em tempo real. Ele ajusta sua posição de forma autônoma e navega pelo quadro circular.
Formação de voo ao ar livre
O drone utiliza tecnologia de formação de enxame, permitindo o controle coordenado de vários drones para atingir o voo em formação.Ao aproveitar comunicação avançada e algoritmos de controle colaborativo, ele facilita a comunicação em tempo real e a troca de informações entre drones, sincronizando seus movimentos e posições para formar uma formação compacta.

Formação Colaborativa Terra-Ar
Esta plataforma suporta formação colaborativa entre drones terrestres e aéreos. Ao alavancar uma rede local com estruturas de topologia para interconectividade de dispositivos, ela usa comunicação UDP e protocolos personalizados para garantir comunicação estável e de alta velocidade. Com controle PID, ela alcança acompanhamento sincronizado entre o drone principal e vários drones escravos, garantindo estabilidade de formação e eficiência operacional.

Exemplo de Competição
Oferece cenários de competição exclusivos com orientação passo a passo, permitindo que os participantes se adaptem facilmente a vários tipos de competições.



Características do Drone Programável S2-F290
Alto Custo-Desempenho
- Projetado para iniciantes para reduzir a curva de aprendizado e facilitar o domínio da operação do drone.
- Com preço acessível, é o drone de aprendizagem ideal para estudantes e entusiastas.
Alta estabilidade
- Testado em diversas condições extremas ao longo de três anos.
- Equipado com uma estrutura de fibra de carbono de 3 mm de espessura para maior durabilidade e estabilidade.
- Permite que os usuários ganhem reconhecimento em sua primeira experiência de competição.
Expansibilidade
- Suporta personalização avançada para diversas aplicações.
- Compatível com vários componentes de expansão para melhorar continuamente o desempenho e a funcionalidade do drone.
Serviço pós-venda sem preocupações
- Equipe profissional que fornece orientação e suporte abrangentes.
- Oferece reparos gratuitos para danos de hardware causados por erros operacionais durante o período de garantia (excluindo acessórios e baterias).
Personalizável
- Fornece suporte para desenvolvimento exclusivo em ROS e QGC.
- Suporta alta precisão de mais de 98% para mapeamento e navegação.
- Compatível com módulos RTK/GPS, logotipos e diversas funcionalidades exclusivas.

Configuração da estação terrestre
Usando o controlador de voo Pixhawk 2.4.8
Equipado com o mais recente processador STM32F427 de 32 bits e o barômetro MS5611, este controlador de voo oferece interfaces abundantes e alto custo-benefício como uma opção de código aberto.
1. Estação terrestre QGC exclusiva e profundamente personalizada
- Alcança mais de 98% de localização para o chinês.
- Suporta recursos avançados como NTRIP.
2. Estação terrestre móvel QGC
- Fornece uma versão móvel da estação terrestre QGC, permitindo uma operação perfeita a partir de um smartphone.
3. Conexão Wi-Fi ou 4G Direct
- Basta conectar via Wi-Fi para operar usando um smartphone ou computador.
- Observação: O sistema "ezuav" mostra que está conectado ao dispositivo, mas não consegue fornecer acesso à internet.

Tutoriais abrangentes e recursos totalmente de código aberto
- Tutoriais de uso extremamente detalhados cobrindo todos os aspectos da funcionalidade do drone S2-F290.
- Materiais totalmente de código aberto, incluindo:
- Introduções de software e guias de instalação.
- Tutoriais para recursos básicos e avançados, como reconhecimento de objetos baseado em OpenCV, mapeamento 3D e voo autônomo externo.
- Instruções de desenvolvimento personalizadas para comunicação PX4 e MAVLink.
- Perguntas frequentes sobre solução de problemas, configuração do ambiente ROS e etapas operacionais.
Related Collections


