









Módulo de junta robótica SteadyWin GIM3510-8, engrenagem planetária 8:1, driver CAN, encoder duplo, 24V 60W
Módulo de junta robótica SteadyWin GIM3510-8, engrenagem planetária 8:1, driver CAN, encoder duplo, 24V 60W
SteadyWin
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O SteadyWin GIM3510-8 é um módulo de junta robótica pequena integrado que combina um motor Aloha, redutor de engrenagem planetária 8:1, driver de comunicação embutido e encoders duplos em um pacote cilíndrico compacto. Com uma alimentação nominal de 24 V (ampla faixa de 12–40 V ou 12–48 V dependendo da placa do driver), alta velocidade de saída de até 564,6 rpm após redução e comunicação CAN bus, é projetado para robôs humanoides ágeis, braços robóticos, plataformas móveis e outros sistemas multi-eixos que requerem controle de movimento preciso em malha fechada.
Principais Características
- Redução planetária de alta velocidade: Redutor de engrenagem planetária 8:1 com velocidade de saída nominal de 535,5 rpm e máxima de 564,6 rpm (GDZ34), adequado para juntas de movimento rápido.
- Ampla faixa de tensão: Operação nominal de 24 V com faixa de entrada de 12–40 V (GDZ34) ou 12–48 V (GDS34) para um design de sistema de energia flexível.
- Saída de torque eficiente: Constante de torque até 0.32 N.m/A com torque nominal até 1.68 N.m e torque de pico até 6.02 N.m, proporcionando transmissão de potência eficiente para articulações robóticas de carga leve a média.
- Driver integrado com bus CAN: Placa de driver embutida (GDS34 ou GDZ34) suporta comunicação CAN para fiação simplificada e controle em rede.
- Feedback de encoder duplo: Encoder de 14 bits no driver e um segundo encoder no eixo de saída para feedback preciso de posição e velocidade.
- Estrutura compacta: Apenas 46 mm de diâmetro externo com comprimento total de 46.5 mm (sem driver) a 51.5 mm (com driver), permitindo layouts densos de múltiplas articulações.
- Durabilidade ambiental: Classificação de proteção IP54, temperatura de operação de -20°C a +80°C, e nível de ruído abaixo de 60 dB.
- Funções de proteção: A proteção contra sobretemperatura, sobrevoltagem e sobrecarga ajuda a manter uma operação segura e fiável em sistemas robóticos de serviço contínuo.
- Robustez mecânica: Suporta até 75 N de carga axial e 300 N de carga radial no eixo de saída, com folga do redutor de 15 arcmin.
- Opção de travão personalizado: Suporta a integração de travões personalizados para articulações que requerem torque de retenção quando desenergizadas.
Para suporte técnico, personalização ou questões de integração sobre o módulo de articulação de robô pequeno GIM3510-8, por favor contacte https://rcdrone.top/ ou envie um email para [email protected].
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
Especificações
| Parâmetro | Unidade | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| Modelo | - | GIM3510-8 | GIM3510-8 |
| Modelo da placa de driver | - | GDS34 (SDC101) | GDZ34 |
| Tensão nominal | V | 24 | 24 |
| Faixa de tensão | V | 12–48 | 12–40 |
| Poder nominal | W | 98 | 60 |
| Torque nominal | N.m | 1.68 | 1.00 |
| Torque de pico | N.m | 3.41 | 6.02 |
| Velocidade nominal após redução | rpm | 430 | 535.5 |
| Velocidade máxima após redução | rpm | 529 | 564.6 |
| Corrente nominal | A | 4.1 | 2.5 |
| Corrente de pico | A | 8.30 | 25.30 |
| Resistência de fase | ohm | 0.48 | 0.48 |
| Indutância de fase | mH | 0.31 | 0.31 |
| Constante de velocidade | rpm/V | 22.04 | 23.53 |
| Constante de torque | N.m/A | 0.44 | 0.32 |
| Número de pares de pólos | Pares | 7 | 7 |
| Relação de transmissão | - | 8:1 | 8:1 |
| Tipo de engrenagem | - | Planetária | Planetária |
| Material da engrenagem redutora | - | ALU | ALU |
| Folga da engrenagem redutora | arcmin | 15 | 15 |
| Peso do motor sem driver | g | 247.6 | 247.6 |
| Peso do motor com driver | g | 259.6 | 259.6 |
| Tamanho sem driver (diâmetro x comprimento) | mm | Ø46 x 46.5 | Ø46 x 46.5 |
| Tamanho com driver (diâmetro x comprimento) | mm | Ø46 x 51.5 | Ø46 x 51.5 |
| Carga axial máxima | N | 75 | 75 |
| Carga radial máxima | N | 300 | 300 |
| Ruído | dB | <60 | <60 |
| Comunicação | - | CAN | CAN |
| Segundo encoder no eixo de saída | - | SIM | SIM |
| Grau de proteção | - | IP54 | IP54 |
| Temperatura de operação | °C | -20 a +80 | -20 a +80 |
| Resolução do encoder (encoder do driver) | bit | 14 | 14 |
| Apoio a encoder separado | - | NÃO | NÃO |
| Suporte de travão personalizado | - | SIM | SIM |
Manuais
- SteadyWin_GIM3510-8_Diagrama_de_Instalação.stp
- GlM3510-8_desenho_de_instalação.pdf
- Gl3510-8_com_desenho_de_instalação_do_freio.pdf
Detalhes

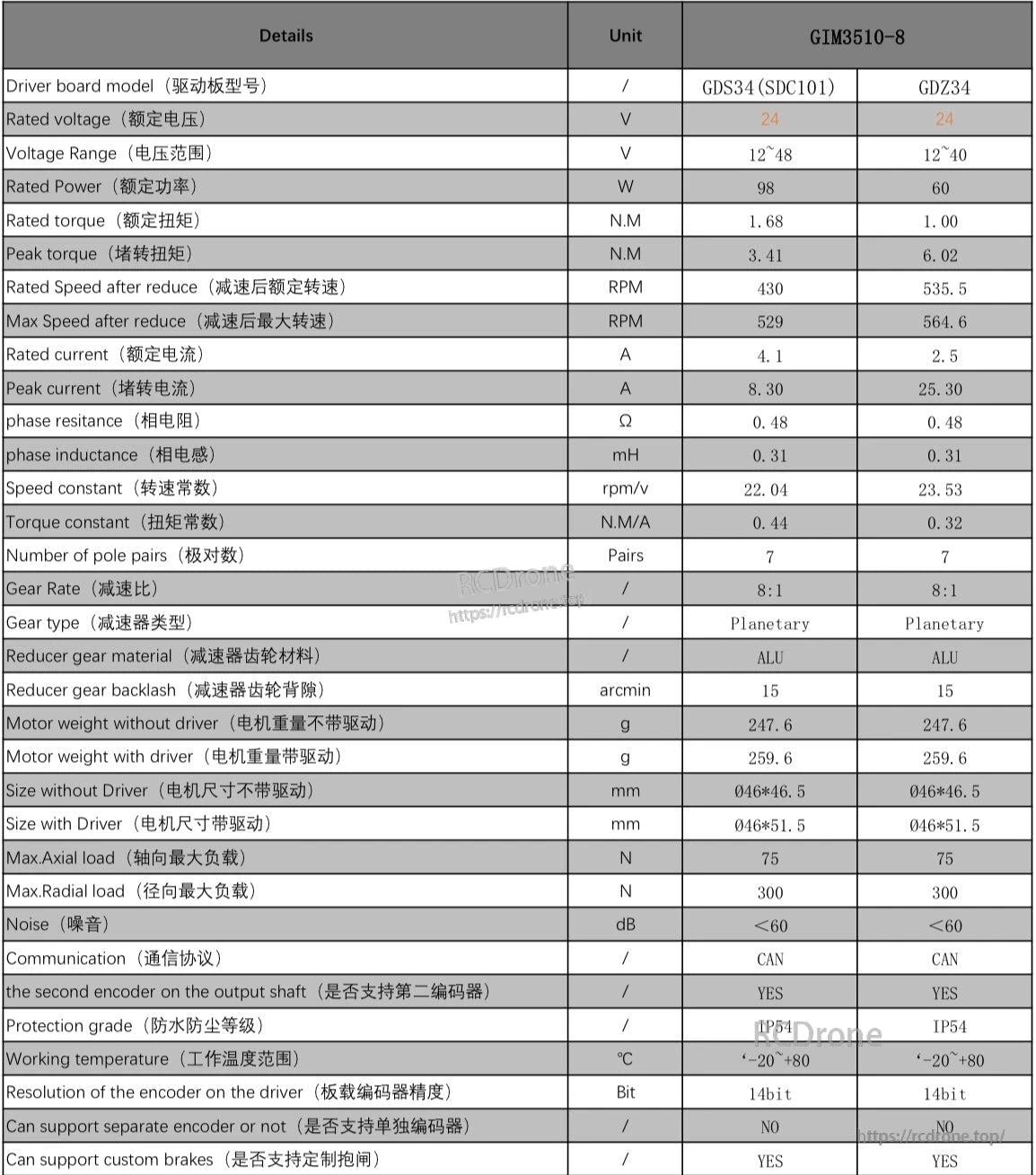
Especificações da junta do robô GIM3510-8 comparando as placas de driver GDS34 e GDZ34. As principais métricas incluem tensão, potência, torque, velocidade, corrente, peso, tamanho, capacidade de carga, ruído, comunicação, encoder, grau de proteção, faixa de temperatura e suporte de freio personalizado.
Related Collections









