




MAD MAX2 140A HV 2-4S ESC Brushless Sensorizado, APP Bluetooth, BEC 6.0/7.4/8.4V para Carro RC 1/10
MAD MAX2 140A HV 2-4S ESC Brushless Sensorizado, APP Bluetooth, BEC 6.0/7.4/8.4V para Carro RC 1/10
MAD
Não foi possível carregar a disponibilidade de recolha
Visão Geral
MAD MAX2 140A HV 2-4S ESC sem escovas com sensor para uso em carros de modelo RC 1/10. Suporta controlo de motores sem escovas com sensor ou sem sensor, com Bluetooth integrado para configuração de parâmetros via APP móvel, leitura de dados e atualização de firmware.
Principais Características
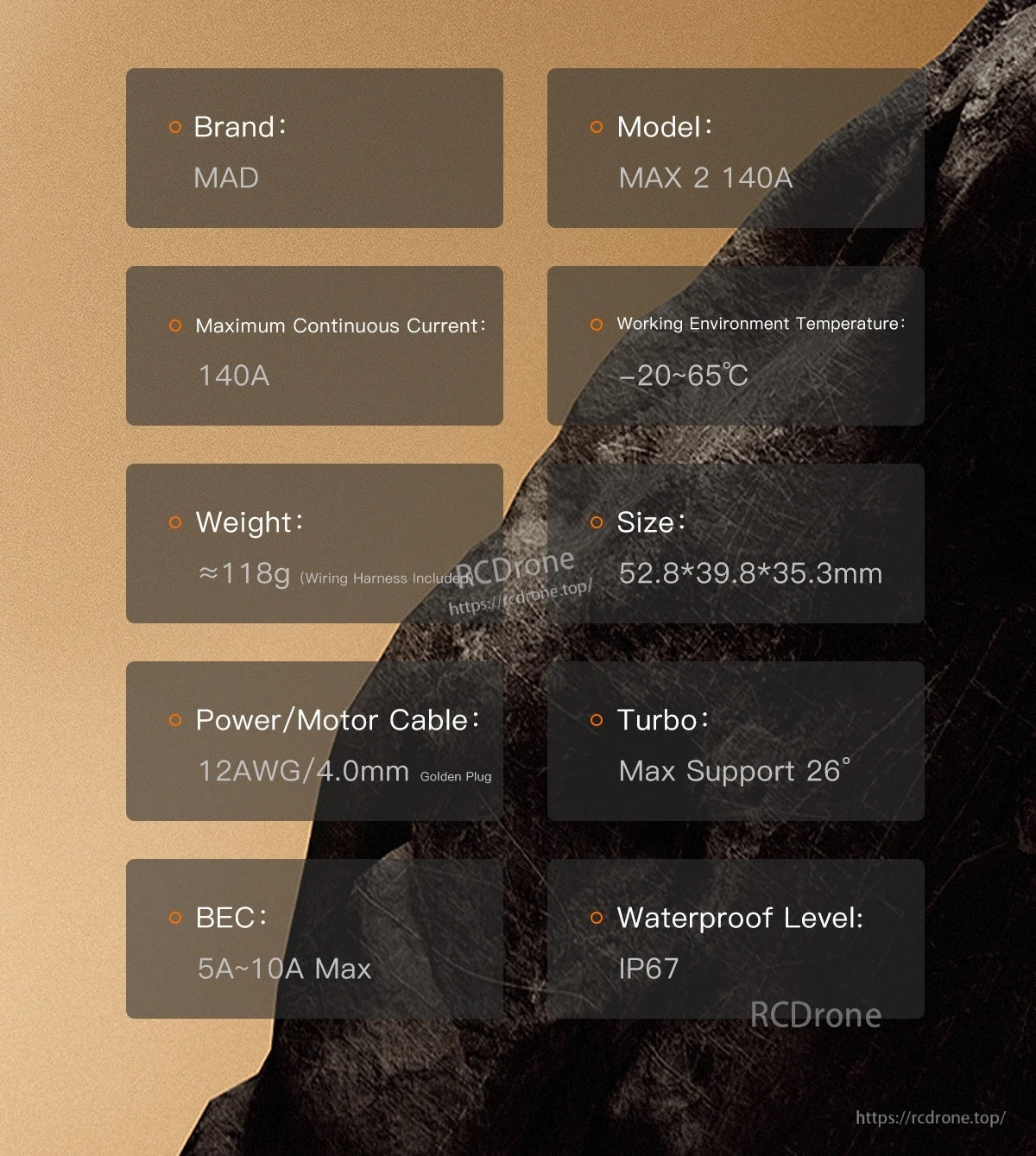
- Corrente contínua: 140A (com limitação de corrente de ciclo PWM para reduzir o impacto da corrente de pulso no motor)
- Bateria / entrada de energia: 2~4S LiPo (o uso de fonte de alimentação DC requer consideração da capacidade de descarga e recuperação de energia)
- Bluetooth integrado: ajuste de parâmetros do ESC, atualização de firmware e observação de dados de operação do motor (registro de dados + dados em tempo real) via APP móvel
- BEC (comutável via APP móvel): 6.0V / 7.4V / 8.4V; 5A contínuo, 10A a curto prazo
- Controlo do ventilador: o ventilador liga quando a temperatura > 55C; desliga quando a temperatura < 50C; a alimentação do ventilador é cortada se ocorrer uma anomalia de corrente elevada
- Texto de design de arrefecimento: função inteligente de arranque/paragem do ventilador (arranque automático à temperatura definida para reduzir o ruído)
- Gravação em tempo real: funcionalidade de gravação de dados em tempo real incorporada através da APP móvel
- Temporização Turbo: disponível (suporta até 26)
- Proteção: baixa tensão, sobre tensão, perda de acelerador, travagem anormal, sobre temperatura, etc.
- Nível de impermeabilidade: IP67 (capacidade de operação em todas as condições climáticas)
- Protocolo XC BUS / X.BUS: suporta controle em tempo real do ESC e leitura de dados de operação através do barramento (para controle de automação/robôs ou outro controle programado)
Para suporte de configuração ou questões de compatibilidade, contacte https://rcdrone.top/ ou envie um email para [email protected].
Especificações
| Modelo | MAX 2 140A |
| Marca | MAD |
| Corrente contínua | 140A |
| Fonte de alimentação | 2~4S LiPo |
| Motor recomendado | Controle de onda quadrada com ou sem sensor para motores sem escovas |
| Velocidade elétrica máxima | 240.000rpm |
| Tensão BEC | 6.0V / 7.4V / 8.4V (comutável via APP móvel) |
| Corrente BEC | 5A contínua, 10A a curto prazo |
| BEC (texto da imagem) | 5A~10A Máx |
| Controlo do ventilador | Ligado: temperatura > 55C; Desligado: temperatura < 50C; alimentação do ventilador desligada durante anomalia de corrente elevada |
| Notas do ventilador | Ventilador alimentado por BEC; se ocorrer corrente de curto-circuito no ventilador, a alimentação é cortada e recupera em 1 segundo |
| Bluetooth | Ajuste de parâmetros da APP; atualização de firmware da APP; observação de dados de operação do motor (registo de dados + dados em tempo real) |
| Turbo | Suporte máximo 26 |
| Nível de impermeabilidade | IP67 |
| Temperatura do ambiente de trabalho | -20~65C |
| Dimensões | 52.80(L) x 39.80(W) x 35.30(H) mm |
| Tamanho (texto da imagem) | 52.8 x 39.8 x 35.3 mm |
| Peso | 118g (com fio) / 118g (harness de fiação incluído) |
| Cabo de Potência/Motor (texto da imagem) | 12AWG / 4.0mm Plugue Dourado |
| Montagem (texto do desenho) | 38.00; 2-M2.50 |
| Nota de velocidade do motor | Velocidade elétrica = Velocidade mecânica x Número de pares de polos = Valor KV x Tensão do barramento x Número de pares de polos (quando pares de polos = 1, a velocidade elétrica é igual à velocidade mecânica) |
Itens configuráveis (via APP)
| Item | Intervalo / Opções | Predefinição |
| Modo de funcionamento | Avançar com travão / Avançar&Reverso e Travão / Avançar com reverso | Avançar&Reverso e Travão |
| Células Lipo | Auto / 2~4S | Auto |
| Tensão BEC | 6.0V / 7.4V / 8.4V | 6V |
| Tensão de corte | Desativado / 2.9~3.6V | 3.2V |
| Rotação do Motor | Frente / Ré | Frente |
| Max.Brake Força | 0~100% | 60% |
| Max.Reverse Força | 0~100% | 25% |
| Soco | 0~12 níveis | 6 níveis |
| Força de Travão de Arrasto | 0~100% | 0% |
| Tempos de Turbo | 0~26 graus | 26 graus |
| Atraso de Turbo | 0~1S | 1s |
| PWM Inicial | 1~10% | 5% |
| Pares de Polos do Motor | 1~64 | 2 |
| BUS de Comunicação | X.BUS Protocolo | X.BUS Protocolo |
| X.BUS-ID | 0~15 | 0 |
Conexões
- Fio de comutação: vermelho e preto
- Fio do acelerador: vermelho = BEC+, preto = BEC-, branco = acelerador
- X.BUS fio: vermelho = BEC+, castanho = BEC-, amarelo = X.BUS
- Rótulos do diagrama do sistema: motor, fio de sensor Hall, Controlador Eletrônico de Velocidade (ESC), X.BUS, comutador, receptor, bateria
Configuração
Iniciar o processo
- Verifique se o circuito está aberto, em curto-circuito ou em mau contacto.
- Verifique se o motor está preso.
- Conecte o cabo de alimentação.
- Pressione o botão de energia.
Quando o tom de aviso da bateria for ouvido (descrito nos avisos normais de inicialização), a inicialização é normal. Se o acelerador estiver normal, a operação do acelerador pode prosseguir.
Defina a faixa do acelerador
- Mantenha o ESC desligado, mova o acelerador até o ponto final de reversão, depois ligue o ESC. Aguarde a luz vermelha e a luz verde pararem de piscar (cerca de 5s).
- Mova o acelerador até o ponto final de avanço dentro de 1s e mantenha-o. Aguarde a luz verde parar de piscar (aguardando a luz verde apagar).
- Mova o acelerador para a posição neutra dentro de 1s e mantenha-o. Aguarde a luz vermelha parar de piscar (aguardando a luz vermelha apagar).
- O aviso de sucesso repete-se quatro vezes: (luz vermelha e luz verde acesas + bip do motor "so, mi, do" + luzes vermelha/verde apagadas + 0,2s de pausa). Aviso de falha: sem sinais, ESC ligado.
Regra de Nomeação Bluetooth
O formato do nome Bluetooth é: modelo aproximado + "-" + ID do código ESC. Exemplo: "XC_E3-1C89" onde "XC_E3" é o modelo aproximado e "1C-89" é o ID do código hexadecimal. Mesmo que o nome seja alterado, o ID do código ESC permanece para evitar nomes duplicados.
Recuperar Parâmetros de Fábrica
Restaurar Bluetooth para as definições de fábrica
- Conecte o fio ESC (fio branco) ao BEC+ (fio vermelho).
- Ative o ESC.
- Desconecte do BEC quando a luz verde estiver apagada e a luz vermelha estiver acesa.
- Remova o curto-circuito.
Quando o boot é ativado, o Bluetooth restaura ao valor de fábrica (a palavra-passe é redefinida para 1234 e o nome retorna ao estado de fábrica). Reinicie o ESC. Se houver um erro de hardware, o Boot pode ser ativado desta forma para atualizar o hardware.
Restaurar parâmetros para as definições de fábrica
Use o botão padrão na página de parâmetros do APP.
Estado do LED & Instruções de Bipe
| Tipo | Sinal luminoso | Sinal sonoro | Observação |
| Aceleração não zerada | Luz vermelha pisca rapidamente | Tom longo "bipe" | Luz vermelha pisca rapidamente |
| Sinal de aceleração perdido | Luz vermelha pisca lentamente | Tom longo "bipe" | No ciclo de 2s |
| Proteção contra baixa voltagem | (Vermelhox1 Verdex2) ... | Tom longo "bipe" x1, Tom curto "bipe" x2 | Verifique a voltagem de entrada ou a configuração da célula se não houver "bipe" antes da detecção do MOSFET |
| Proteção contra sobrevoltagem | (Vermelhox1 Verdex3) ... | Nulo | Tensão demasiado alta; verifique o valor de resistência do ESC |
| MOS sobre temperatura (operacional > 125C / arranque > 110C) | (Vermelhox1 Verdex4) ... | Tom longo beep x1, tom curto beep x4 | Retoma quando a temperatura desce abaixo de 100C |
| Capacitor sobre temperatura (operacional > 105C / arranque > 100C) | (Vermelhox1 Verdex5) ... | Tom longo beep x1, tom curto beep x5 | Retoma quando a temperatura desce abaixo de 100C |
| Parâmetros de aceleração anormais | (Vermelhox1 Verdex7) ... | Tom longo beep x1, tom curto beep x7 | Inicie a calibração do acelerador se persistir |
| Anomalia na lógica de saída Hall | (Vermelhox1 Verdex8) ... | Beep longo x1, beep curto x8 | Reconecte o fio Hall; se persistir, desconecte o fio Hall |
| Calibração bem-sucedida | (Vermelho Verde) x4 | (do-mi-sol) x4 | Se a calibração for irregular/sem sucesso, o ESC sai da calibração e entra no arranque normal |
| Normal (sem ação do acelerador) | (Verde) ... | Nulo | |
| Operação do acelerador (normal) | Luz verde pisca mais rápido com mais aceleração | Nulo | |
| Turbo ligado | Luz verde permanece acesa | Nulo | |
| Travagem | Luz vermelha está acesa | Nulo | Luz vermelha apaga ao soltar o travão |
| Arranque em progresso | Verde: ligado 2s & desligado 2s; Vermelho permanece a piscar | Nulo | Duração do vermelho = tempo de operação do piscar |
| Indicação normal de bateria-célula ao iniciar | Sinal de luz de aviso quaternário (tom longo com vermelho; tom curto com verde) | do, mi, so + som de aviso quaternário | Tom longo = 5 células; tom curto = 1 célula (exemplo mostrado: 8 células = longo x1 + curto x3) |
| Circuito aberto MOS | (Vermelho x2) ... | Nenhum | Desconecte o fio do motor; se ainda estiver anormal, é necessária uma inspeção |
| Curto-circuito MOS | (Vermelhox2 Verdex1) ... | Nenhum | Desconecte o fio do motor; se ainda estiver anormal, é necessária uma inspeção |
| Circuito de amostragem de corrente anormal | (Vermelhox2 Verdex2) ... | Nenhum |
Notas:
1) Luz vermelha corresponde a tom longo; luz verde corresponde a tom curto.
2) Para economizar energia, todos os bipes duram 5 minutos; se os erros forem corrigidos, o efeito é retomado nos próximos 5 minutos.
3) "..." no sinal luminoso indica repetição.
Precauções
- Não conecte os fios de entrada do ESC DC+ e DC- de forma invertida. A conexão invertida pode danificar o ESC; o serviço de garantia não é fornecido neste caso.
- Se um sensor Hall for utilizado, verifique os fios de fase do motor e a fiação do Hall.
- Para motores sem sensores de temperatura, a operação de alta potência a longo prazo pode causar queima.
- Alguns motores não conseguem suportar alta velocidade devido à estrutura mecânica; forçar uma velocidade mais alta pode danificar o motor.
- Se não for utilizado por mais de 1 hora, desconecte os fios de alimentação do ESC.
- Após modificar as linhas de conexão, verifique o circuito cuidadosamente antes de usar. Abra o acelerador lentamente e confirme que não há erros antes da operação normal.
Calibração do Acelerador
Detalhes
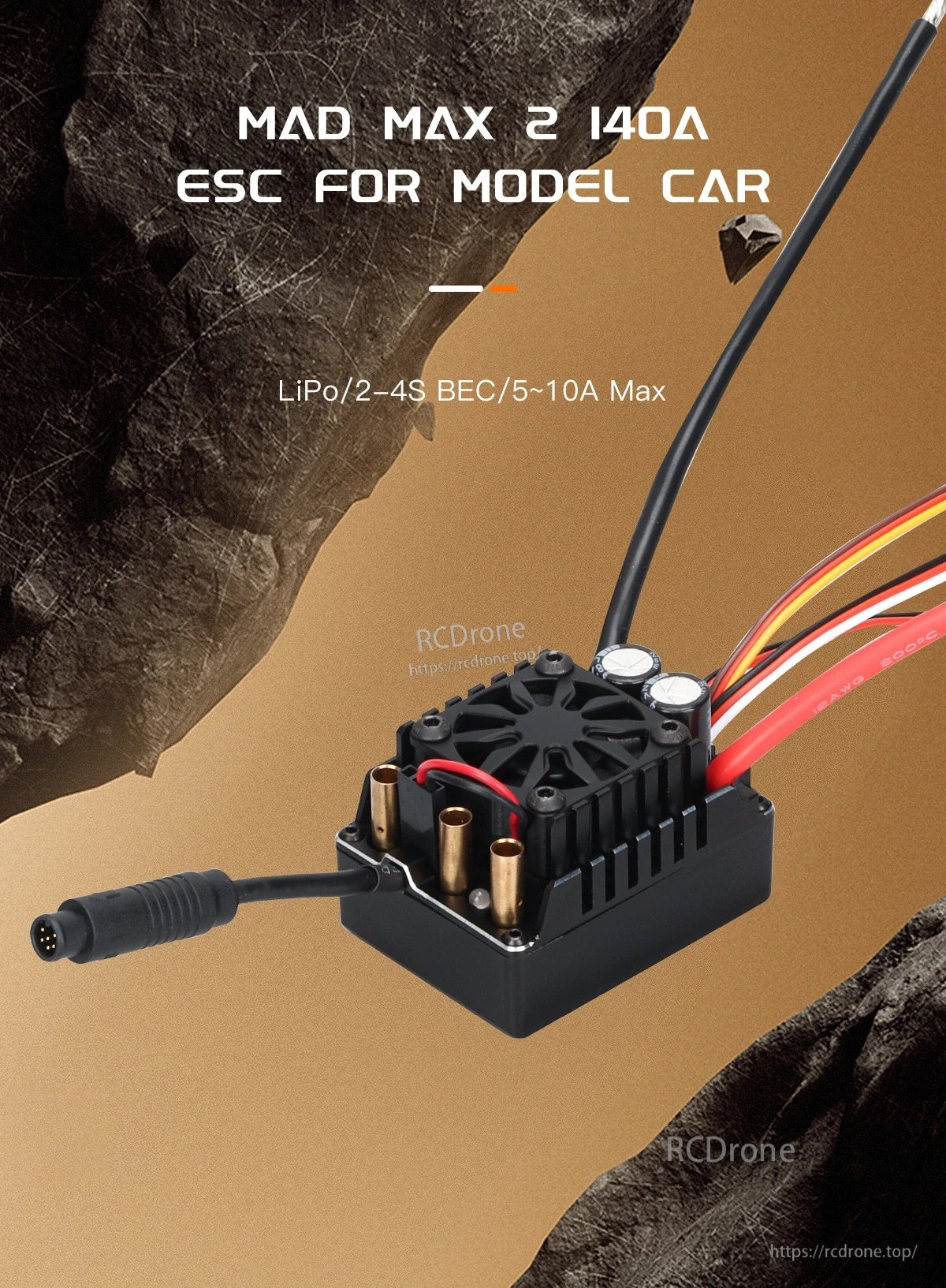
O ESC MAD MAX2 140A possui um ventilador de refrigeração integrado e suporte rotulado para LiPo 2–4S com BEC de até 5–10A máximo.

O ESC brushless sensorizado MAD MAX2 utiliza um design de refrigeração inteligente com um ventilador que liga e desliga automaticamente com base na temperatura.

O ESC brushless sensorizado MAD MAX2 apresenta transmissão Bluetooth integrada para configuração de parâmetros através de aplicação móvel, leitura de dados e atualizações de firmware.
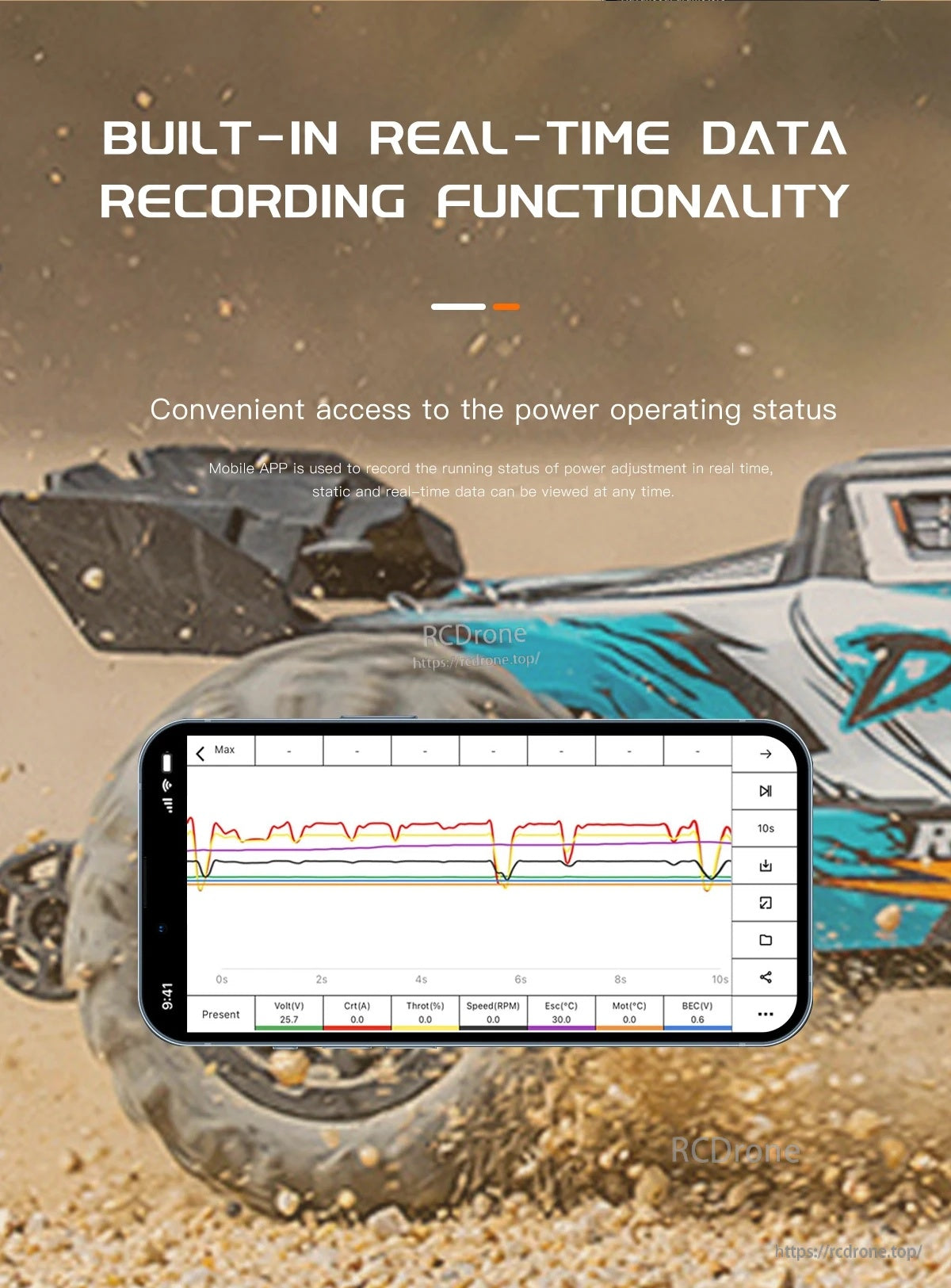
A gravação de dados em tempo real integrada permite que você revise tendências de potência e desempenho em um log estilo gráfico.
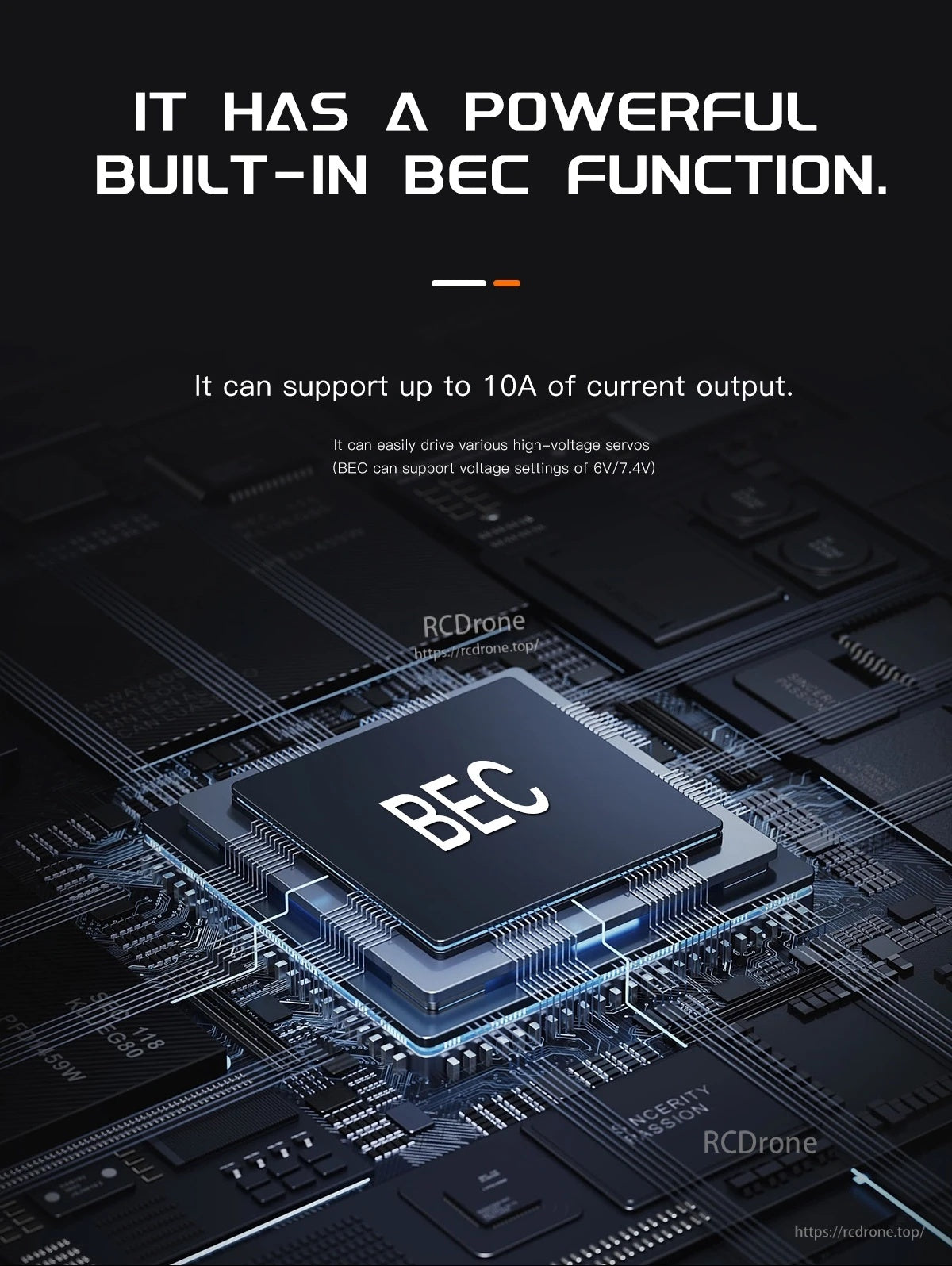
O ESC MAD MAX2 inclui um BEC integrado classificado até 10A com saída selecionável de 6V ou 7.4V para alimentar servos HV.
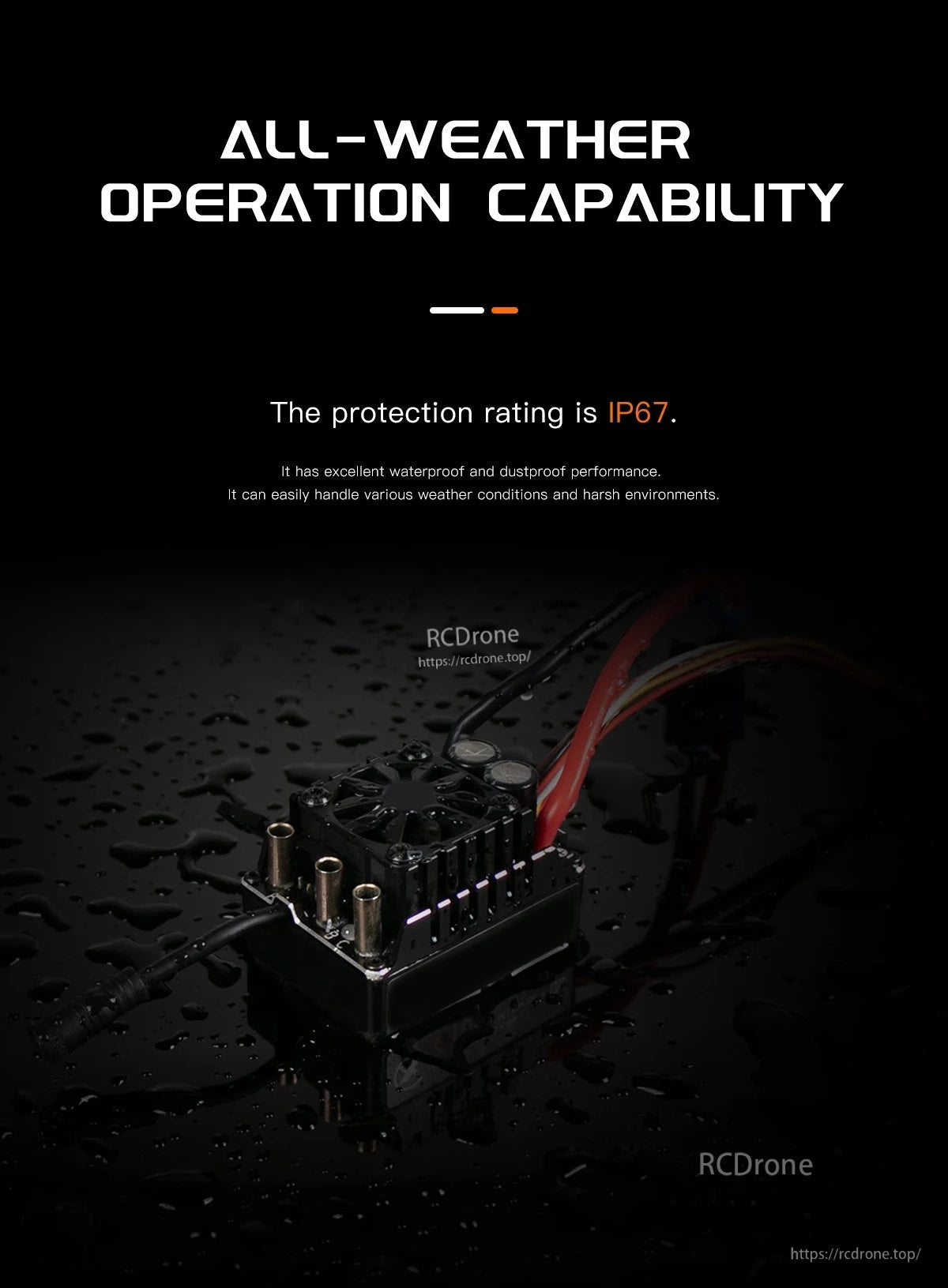
O ESC brushless sensorizado MAD MAX2 é classificado como IP67 para operação em todas as condições climáticas em ambientes adversos.

O ESC brushless sensorizado MAD MAX2 140A apresenta um ventilador de refrigeração montado na parte superior, 3 conectores de motor tipo bullet e um cabo de sensor para uma fiação limpa de carro RC.
Especificações do ESC MAD MAX2 140A incluem impermeabilização IP67, um corpo de 52.8×39.8×35.3mm e uma faixa de temperatura de trabalho de -20 a 65°C.
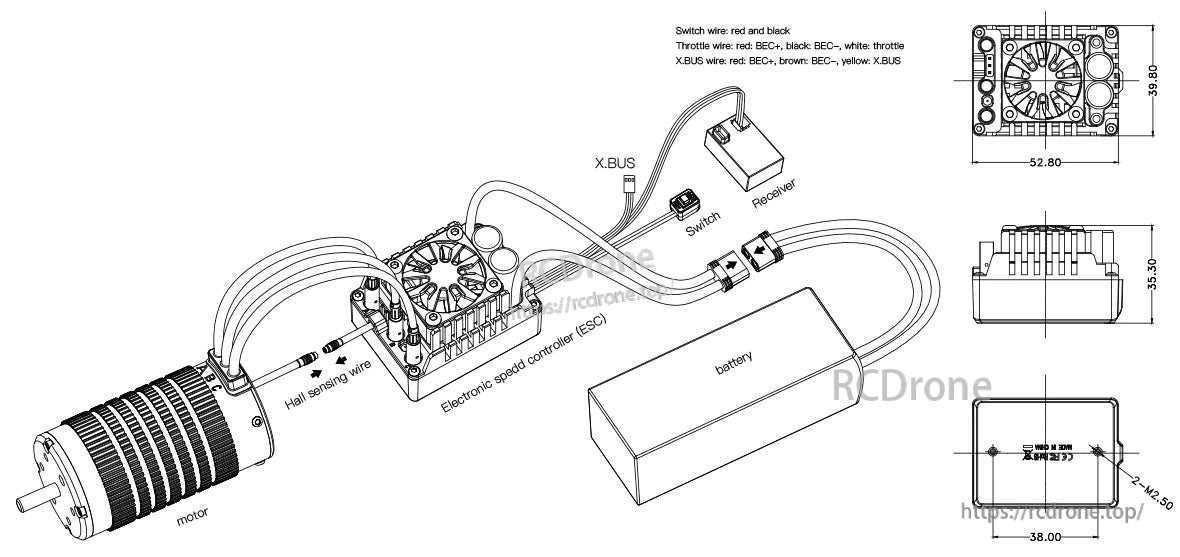
O layout do ESC sensorizado MAD MAX2 140A HV inclui conexões rotuladas para motor, bateria, receptor/liderança do acelerador, XBUS, interruptor e porta de programação, além das dimensões gerais para montagem.
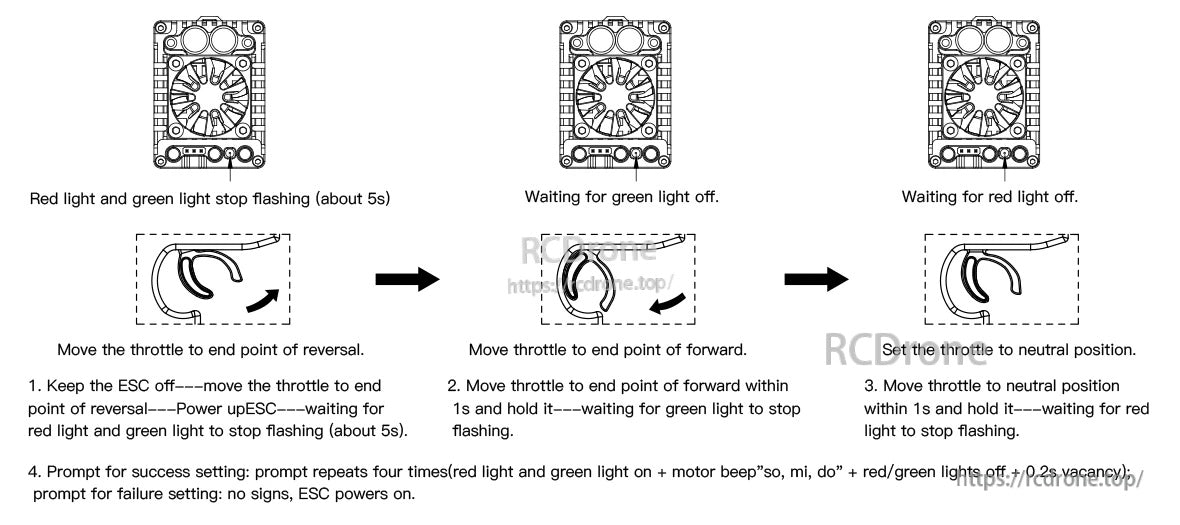
A configuração da faixa do acelerador do ESC sensorizado MAD MAX2 utiliza os avisos de LED vermelho e verde enquanto você define os pontos finais do acelerador em marcha à ré, marcha à frente e neutro.
Related Collections




