



SteadyWin DD5015 Motor 24V 30rpm RS485/CAN Encoder Absoluto de Volta Única 14bit 173g
SteadyWin DD5015 Motor 24V 30rpm RS485/CAN Encoder Absoluto de Volta Única 14bit 173g
SteadyWin
Preço normal
$138.00 USD
Preço normal
Preço de saldo
$138.00 USD
Preço unitário
por
Impostos incluídos.
Envio calculado na finalização da compra.
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Motor SteadyWin DD5015 é um motor compacto com comunicação RS485 / CAN e um encoder absoluto de uma volta (14 bits). É projetado para casos de uso em robótica e automação onde são necessários saída controlada de baixa velocidade e feedback.
Para suporte de integração e perguntas pré-venda, entre em contato https://rcdrone.top/ ou envie um e-mail para [email protected].
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
Especificações
| Tensão nominal | 24V |
| Faixa de tensão | 10~28V |
| Corrente nominal | 1.2A |
| Poder nominal | 28.8W |
| Torque nominal | 0.48N.M |
| Velocidade nominal | 30rpm |
| Velocidade máxima sem carga | 526 rpm |
| Torque de pico | 0.58 N.m |
| Corrente de pico | 1.63A |
| Constante de velocidade | 21.92 rpm/v |
| Constante de torque | 0.33N.M/A |
| Número de pares de polos | 14Pares |
| Resistência de fase | 4.9Ω |
| Indutância de fase | 2.046Mh |
| Comunicação | RS485 / CAN |
| Tipo de encoder | Absoluto de uma volta |
| Resolução | 14bit |
| Peso do motor | 173g |
| Temperatura de trabalho | -20~80°C |
Detalhes Mecânicos / Interface (do desenho)
- Marcação do modelo: DD5015
- Diâmetro do corpo: Ø49±0.1
- Diâmetro da tampa final: Ø42
- Padrão de montagem: 4-M3 profundidade 4.5 (mostrado nos padrões Ø20 e Ø42)
- Comprimentos das chaves: 34±0.1 comprimento total; segmentos 13 e 20.5
- Características centrais: Ø5; Ø13.6 (+0.05/0); Ø12.6 (+0.1/0) com profundidade 16.7
- Conector: SH1.0-8PIN
- Rótulos dos pinos: 485_A, 485_B, CAN_H, CAN_L, GND, GND, VCC, VCC
Documentos
Detalhes
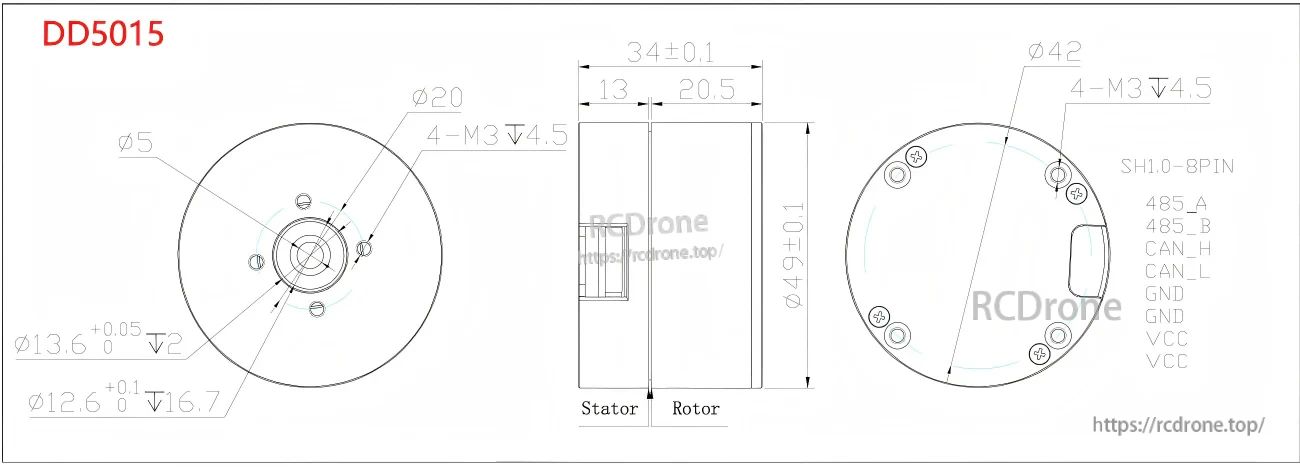
As dimensões de montagem e o pinout do conector SH1.0 de 8 pinos para fiação RS485/CAN são fornecidos para planejamento de integração.
Related Collections



