




Motor SteadyWin GB3510 12V 0,11 N·m 363RPM, Tipo de Encoder AS5048A/AS5600, Compatível com 12/14 bits
Motor SteadyWin GB3510 12V 0,11 N·m 363RPM, Tipo de Encoder AS5048A/AS5600, Compatível com 12/14 bits
SteadyWin
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O motor SteadyWin GB3510 é um motor compacto classificado para operação a 12V, projetado para casos de uso em robótica e controle de movimento. Suporta opções de encoder AS5048A/AS5600 e é declarado como compatível com encoders de 12 bits e 14 bits.
Principais Características
- Modelo: GB3510
- Tipo de encoder: AS5048A / AS5600
- Compatível com encoders de 12 bits e 14 bits
- Compatível com anéis deslizantes; declarado como amplamente utilizado em gimbals e pods, e estável em baixas velocidades
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
Especificações
| Modelo | GB3510 |
| Tensão Nominal | 12V |
| Torque Nominal | 0.11 N·m |
| Velocidade Nominal | 363 RPM |
| Velocidade Máxima | 965 RPM |
| Corrente Nominal | 0.53 A |
| Torque de Estacionamento | 0.16 N·m |
| Corrente de Estacionamento | 0.8 A |
| Resistência de Fase | 8.8 Ω |
| Voltas do enrolamento do motor | 40T |
| Indutância de Fase | 3.95Mh |
| Constante de Velocidade | 45rpm/v |
| Constante de Torque | 0.2N.M/A |
| Inércia do rotor | 81gcm^2 |
| Número de pares de polos | 11Pares |
| Peso do motor sem encoder | 76g |
| Peso do motor com encoder | 89g |
| Temperatura de trabalho | 20~80 °C |
| Temperatura máxima de desmagnetização | 120 °C |
| Tipo de encoder | AS5048A/AS5600 |
Notas do desenho mecânico (do diagrama)
- Configurações mostradas: com caixa de encoder / sem caixa de encoder
- Anotações do padrão de furos mostradas: 4-M3, 3-M2, 4-M2, 4-M2.5
- Diâmetros mostrados: φ25, φ30, φ40±0.05, φ20, φ12.6, φ33.5, φ16.6, φ38±0.05
- Dimensões lineares mostradas: 25±0.2, 20±0.2, 19, 20.5, 16, 1, 0.5
Manuais / Ficheiros CAD
Para questões de integração (seleção de encoder, fiação ou ajuste mecânico), contacte o suporte em [email protected] or visite https://rcdrone.top/.
Detalhes
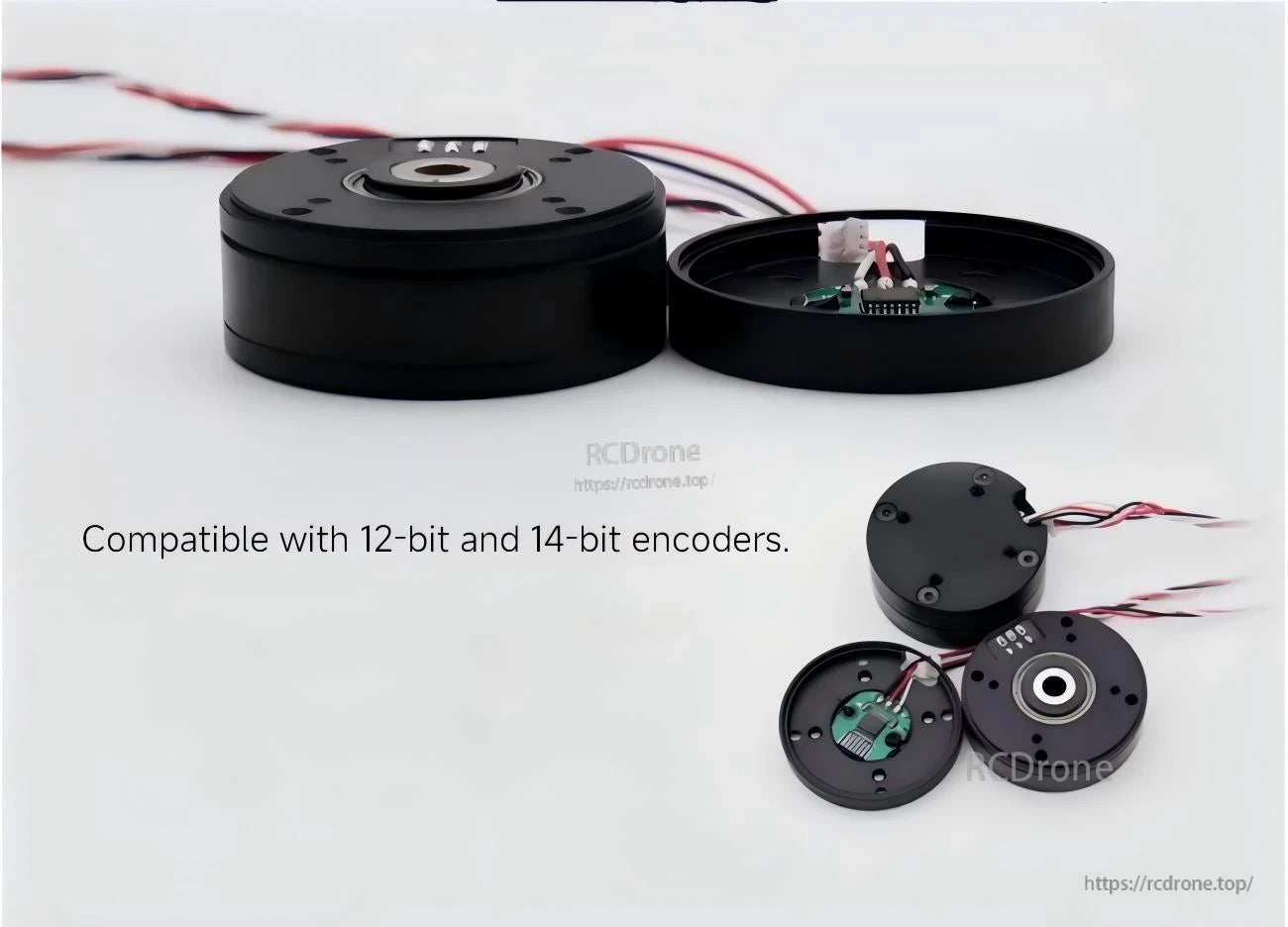
Escolha opções de encoder AS5048A ou AS5600 com compatibilidade de 12 bits/14 bits para controlo preciso a baixa velocidade em robótica.

Um fator de forma compatível com anéis deslizantes suporta operação estável a baixas velocidades para gimbals, pods e construções de controlo de movimento.

Related Collections




