SteadyWin GIM4305-10 Motorredutor Planetário — 48W, Relação 10:1, Binário Nominal 1 N·m, 300–366 RPM, CAN, IP54 para Atuadores Robóticos
SteadyWin GIM4305-10 Motorredutor Planetário — 48W, Relação 10:1, Binário Nominal 1 N·m, 300–366 RPM, CAN, IP54 para Atuadores Robóticos
SteadyWin
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Motor Redutor Planetário SteadyWin GIM4305-10 é um motor redutor planetário compacto com um driver SDC101 integrado e comunicação CAN. Projetado para atuação de precisão, a unidade opera a uma tensão nominal de 24V (faixa de 12-36V), fornece 48W de potência e oferece um torque nominal de 1 N·m (torque de estancamento 3,47 N·m) após uma redução de 10:1. O GIM4305-10 é classificado como IP54 e suporta um encoder de 14 bits e conexão de encoder separada; suporte de freio personalizado está disponível. As proteções integradas incluem monitoramento de sobretemperatura, sobretensão e sobrecarga.
Para atendimento ao cliente e suporte técnico, entre em contato: [email protected] ou visite https://rcdrone.top/.
Principais Características
- Redutor de engrenagem planetária, relação 10:1 para aumento do torque de saída e controle posicional.
- Driver SDC101 integrado com comunicação CAN para controle em rede.
- Velocidade nominal após redução 300 RPM, máxima 366 RPM.
- Encoder: incorporado de 14 bits, suporta entrada de encoder separada.
- Envelope compacto Ø53×26mm e baixa massa (140g sem driver; 150g com driver).
- Classificações mecânicas: carga axial máxima 125N, carga radial máxima 500N, folga do engrenagem 15 arcmin.
- Faixa de temperatura de operação -20°C a +80°C e ruído acústico <60 dB.
- Material do redutor: ALU ou AÇO. Suporte de freio personalizado disponível.
Especificações
| Modelo | GIM4305-10 |
| Modelo do Driver | SDC101 |
| Tensão Nominal | 24V (faixa de 12-36V) |
| Poder | 48W |
| Torque Nominal (após redução) | 1 N·m |
| Torque de Estancamento | 3.47 N·m |
| Velocidade Nominal (após redução) | 300 RPM |
| Velocidade Máxima (após redução) | 366 RPM |
| Corrente Nominal | 2A |
| Corrente de Estancamento | 5.6A |
| Resistência de Fase | 1.15 Ω |
| Indutância de Fase | 0.41 mH |
| Constante de Velocidade | 15.25 rpm/v |
| Constante de Torque | 0.62 N·m/A |
| Número de Pares de Polo | 14 Pares |
| Relação de Transmissão | 10:1 |
| Tipo de Engrenagem | Planetária |
| Material da Engrenagem Redutora | ALU ou AÇO |
| Folga da Engrenagem Redutora | 15 arcmin |
| Peso do Motor (sem Driver) | 140 g |
| Peso do Motor (com Driver) | 150 g |
| Tamanho (sem Driver) | Ø53×26 mm |
| Tamanho (com Driver) | Ø53×26 mm |
| Carga Axial Máxima | 125 N |
| Carga Radial Máxima | 500 N |
| Ruído | <60 dB |
| Comunicação | CAN |
| Segundo Encoder | NO |
| Grau de Proteção | IP54 |
| Temperatura de Operação | -20°C a +80°C |
| Resolução do Encoder | 14 Bits |
| Suporte a Encoder Separado | SIM |
| Suporte a Travão Personalizado | SIM |
Aplicações
- Robôs humanoides e articulações robóticas
- Braços robóticos e módulos de atuação
- Exoesqueletos e dispositivos assistivos vestíveis
- Robôs quadrúpedes e articulações de pernas
- Módulos de condução AGV e robótica móvel
- Projetos de robôs de código aberto (e.g., Integração Pupper V3)
Manuais
- Diagrama de Instalação GIM4305-10SHS (PDF)
- Diagrama Esquemático da Interface do Motor GIM4305 (PDF)
- SteadyWin_GIM4305_10.stp
Detalhes
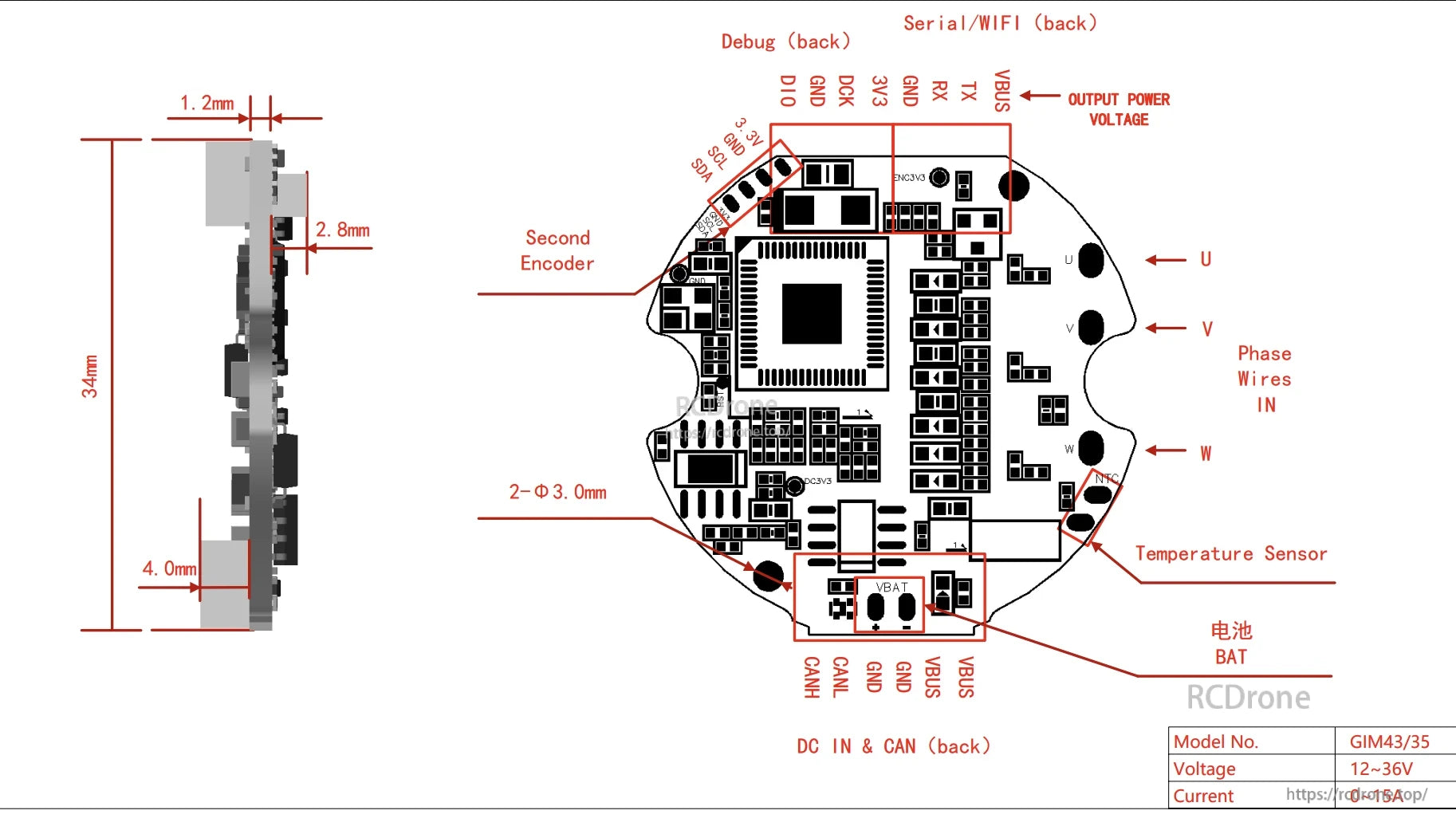
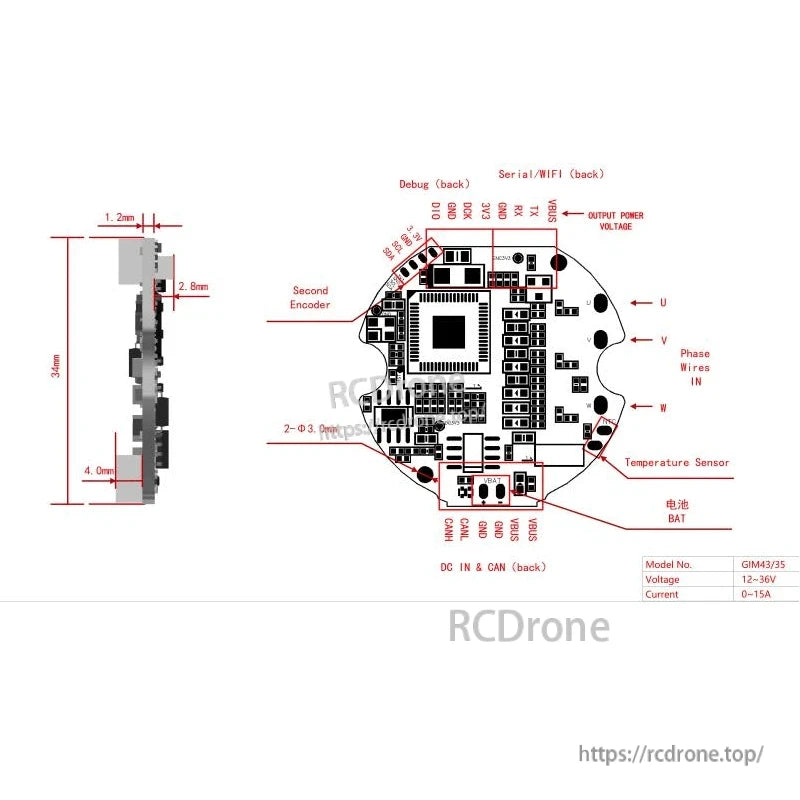
SteadyWin O diagrama da PCB do motor GIM43/35 mostra conexões, dimensões e componentes—encoders, fios de fase, sensor de temperatura, entrada de bateria, portas de depuração—operando a 12–36V e 0–15A de corrente.
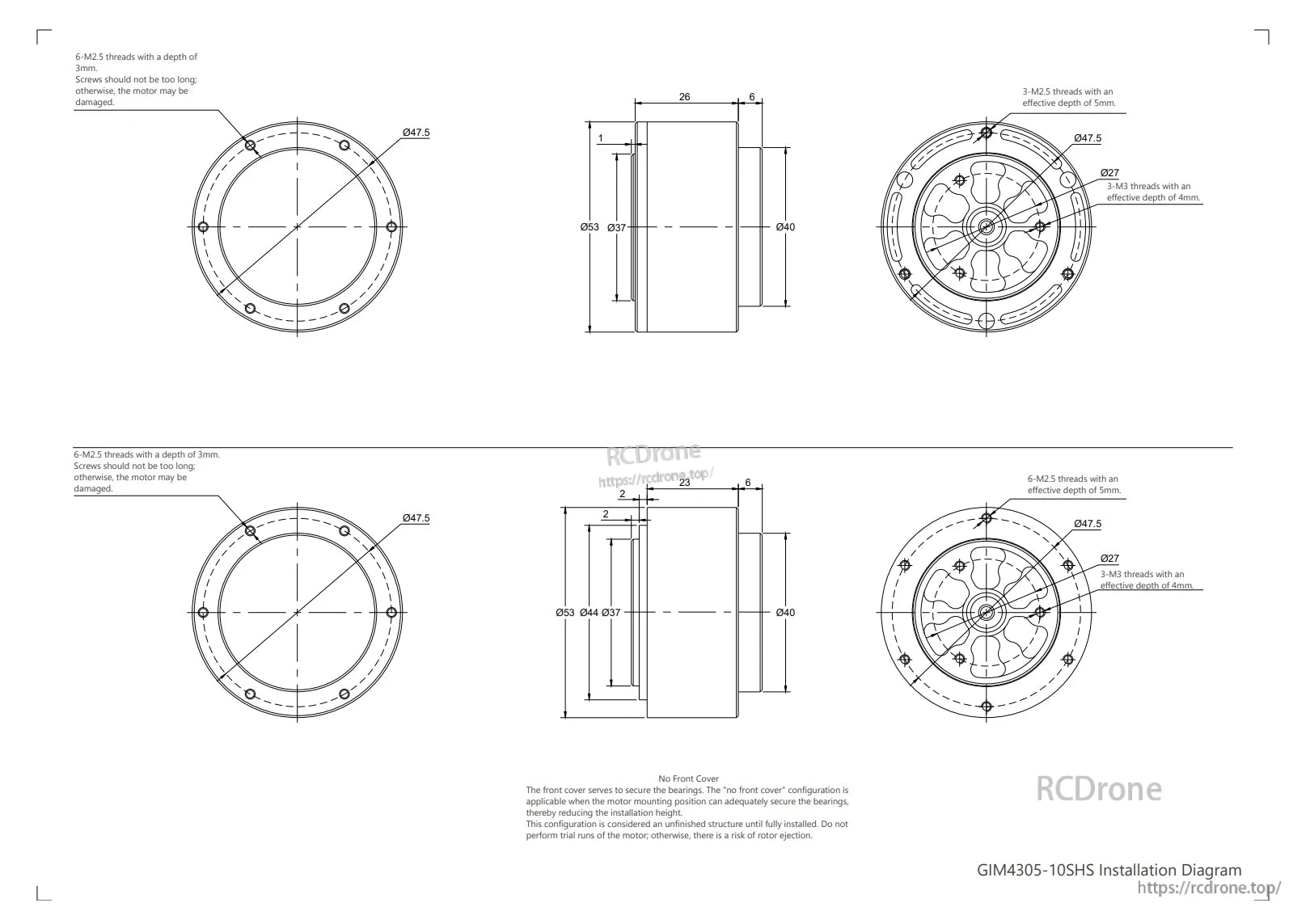
O diagrama técnico para a instalação do motor GIM4305-10SHS mostra dimensões, especificações de rosca, avisos sobre o comprimento dos parafusos para evitar danos e configurações com e sem tampa frontal.
Related Collections