





Motor SteadyWin PM100 24V 1,6N·m 130RPM (290RPM Máx) Tipo de Encoder AS5048A/AS5600
Motor SteadyWin PM100 24V 1,6N·m 130RPM (290RPM Máx) Tipo de Encoder AS5048A/AS5600
SteadyWin
Preço normal
$117.00 USD
Preço normal
Preço de saldo
$117.00 USD
Preço unitário
por
Impostos incluídos.
Envio calculado na finalização da compra.
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Motor SteadyWin PM100 é um motor de 24V projetado para aplicações de condução e articulação em robótica. Apresenta um torque nominal de 1.6N·m a 130RPM, com uma velocidade máxima de 290RPM, e suporta tipos de encoder AS5048A/AS5600.
Aplicações
- Robôs humanoides
- Braços robóticos
- Exoesqueletos
- Robôs quadrúpedes
- Veículos AGV
- Robôs ARU
Especificações
| Modelo | PM100 |
| Tensão Nominal | 24V |
| Torque Nominal | 1.6N·m |
| Velocidade Nominal | 130RPM |
| Velocidade Máxima | 290RPM |
| Corrente Nominal | 1.75A |
| Torque de estancamento | 2N·m |
| Corrente de estancamento | 3A |
| Voltas do enrolamento do motor | 30T |
| Resistência de fase | 3Ω |
| Indutância de fase | 31.5Mh |
| Constante de velocidade | 11rpm/v |
| Constante de torque | 1.13N.M/A |
| Inércia do rotor | 2860gcm^2 |
| Número de pares de polos | 21Pares |
| Peso do motor sem encoder | 454g |
| Peso do motor com encoder | 460g |
| Temperatura máxima de desmagnetização | 120°C |
| Temperatura de trabalho | 20~80°C |
| Tipo de encoder | AS5048A/AS5600 |
Dimensões mecânicas / de montagem
| Diâmetro exterior | Ø98.5 ±0.05 |
| Diâmetro do passo | Ø34.8 |
| Padrão de furos A | 6-M3 em Ø28. |
| Padrão de furos B | 4-M3 em Ø65 |
| Padrão de furos C | 2-M3 |
| Padrão de furos D | 8-M2.5 em Ø47 |
| Dimensão de referência | 36.5 ±0.2 |
| Dimensões de referência | 28.5; 24.8; 38.1; 14; 5; 2; 1 |
| Saída do cabo de alimentação | Marcado no desenho |
Para ajuda na seleção ou suporte à integração, contacte https://rcdrone.top/ ou envie um email para [email protected].
Documentos
PM100_installation_diagram.pdf
Detalhes
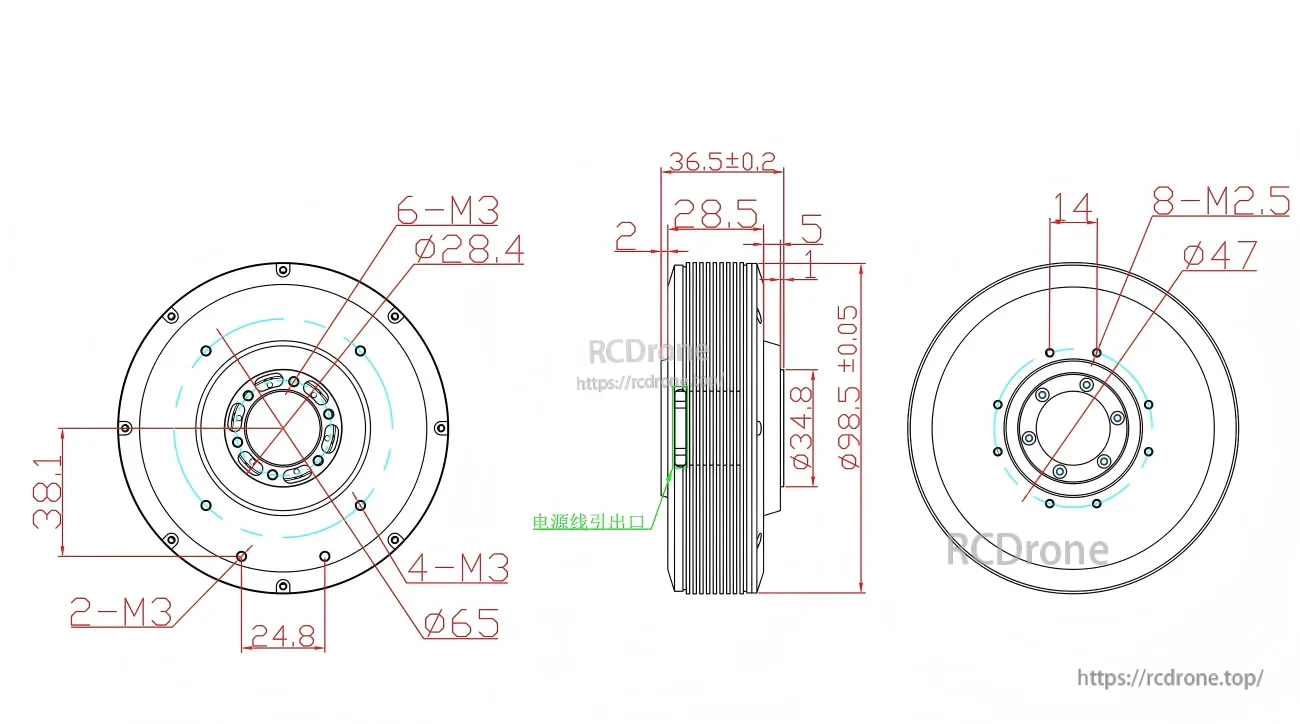
As dimensões de montagem e folga ajudam a confirmar a compatibilidade, incluindo o diâmetro externo de Ø98.5 mm e os padrões de círculo de parafusos padrão.
Related Collections





