Kit Drone DIY STM32 - Drone Avançado Programável Open-Source com Linguagem C para Aprendizagem, I&D e Competições
Kit Drone DIY STM32 - Drone Avançado Programável Open-Source com Linguagem C para Aprendizagem, I&D e Competições
RCDrone
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Kit de Drone DIY STM32 é uma plataforma abrangente de código aberto projetada para estudantes, entusiastas e desenvolvedores explorarem sistemas de voo de quadricópteros. Alimentado pelo microcontrolador STM32F103C8T6, este kit suporta programação em linguagem C e algoritmos avançados de controle de voo, tornando-o uma excelente ferramenta para aprendizado, P&&D e competições. Com hardware robusto, design modular e recursos de desenvolvimento abrangentes, este kit é perfeito para dominar a tecnologia de drones e sistemas embutidos.
Principais Características
- Programável e de Código Aberto: Totalmente personalizável usando a linguagem C e bibliotecas padrão STM32, com anotações detalhadas para facilitar o aprendizado.
-
Hardware de Alto Desempenho:
- Microcontrolador STM32F103C8T6: 72MHz (controlador principal) e 48MHz (controle remoto).
- MPU6050: Giroscópio e acelerómetro de seis eixos para um voo estável.
- Estabilizadores de tensão integrados (662K e BL8530) e MOSFET (SI2302) para uma gestão de energia fiável.
-
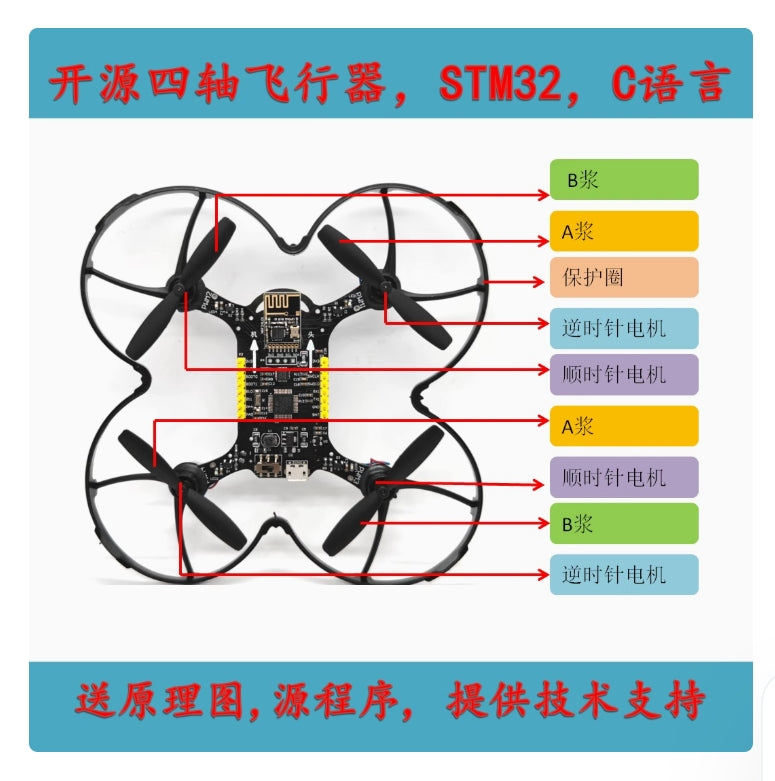
Design Modular e Durável:
- Inclui um motor de copo oco 720 e uma caixa de redução para alta estabilidade de carga.
- Componentes substituíveis para fácil manutenção e atualizações.
-
Ferramentas de Desenvolvimento Amigáveis:
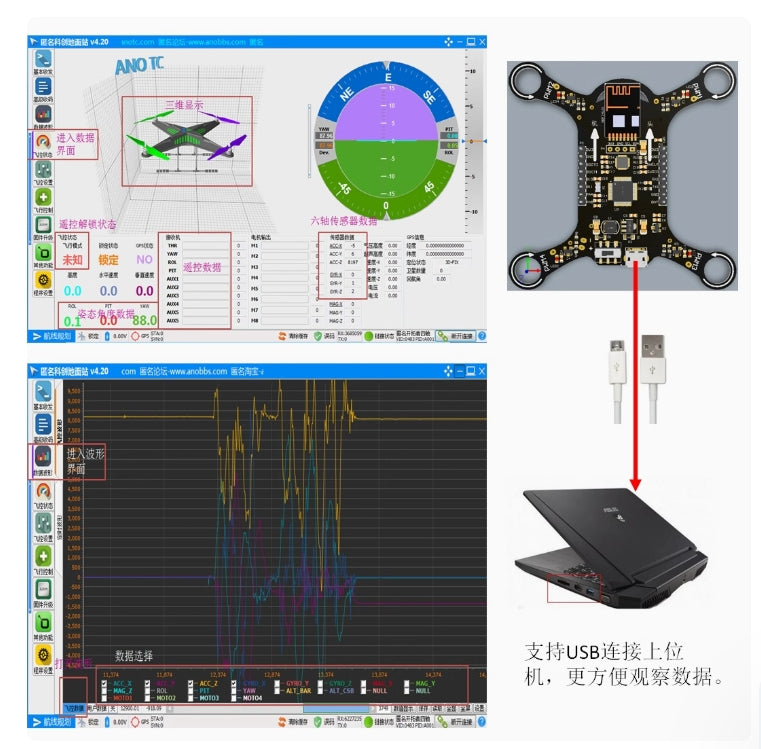
- Interface USB a bordo para monitorização de dados e depuração.
- Recursos de programa de código aberto, incluindo ambiente Keil MDK5, código-fonte e tutoriais detalhados.
-
Controlo de Voo Estável:
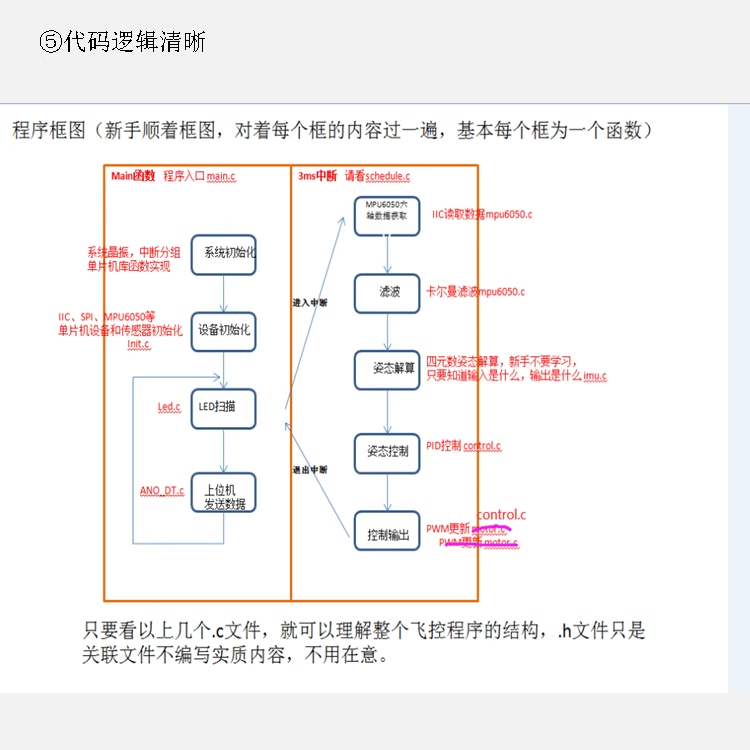
- Controlo PID avançado e filtragem de Kalman para estabilização precisa.
- Suporta controlo direcional para frente, para trás, esquerda e direita.
Especificações
| Categoria | Descrição |
|---|---|
| Tempo de Voo | 8 minutos (sem estrutura de proteção) |
| Tempo de Carregamento | 40 minutos |
| Alcance do Controlador | Interior: 30m; Exterior: 30m (recomendado abaixo de edifícios de três andares) |
| Motor | 720 copo oco |
| Tamanho da Hélice | 55 mm |
| Controlador de Voo | STM32F103C8T6 + MPU6050 + NRF24L01 |
| Peso | Estrutura leve para um controlo de voo estável. |
Conteúdo do Kit
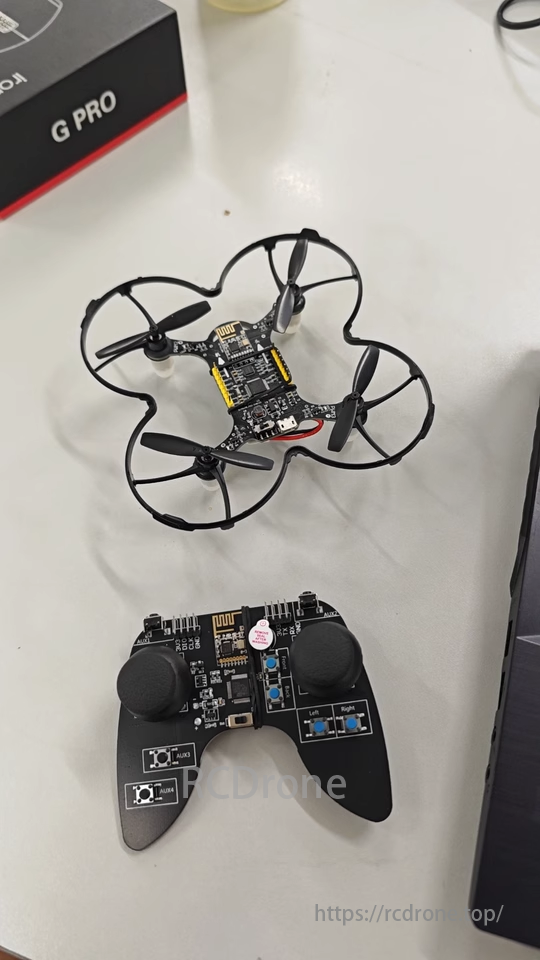
- Estrutura do quadcopter × 1
- Controlo remoto × 1 (8 canais, 4 joysticks + 4 botões com feedback sonoro)
- Hélices de substituição × 1 conjunto
- Carregador de bateria USB × 1
- Bateria principal de 550mAh × 1 (baterias adicionais podem ser adquiridas separadamente)
- Bateria remota de 550mAh × 1
- Motor de copo oco 720 de substituição × 1
Características de Desenvolvimento Adicionais
- Tutoriais Abrangentes: Inclui documentação detalhada, código fonte, folhas de dados e vídeos de teste.
- Monitorização de Dados em Tempo Real: USB a bordo suporta inspeção direta de dados via software de computador superior.
- Sistema de Energia Otimizado: Estabilizadores de tensão e caminhos de energia independentes garantem operação suave sem interferências.
- Desenvolvimento Secundário Pronto: Ideal para P&D avançado, teste de algoritmos de voo e modificações DIY.
Diretrizes Sugeridas de Operação e Armazenamento
-
Ambiente de Operação:
- Recomendado para uso interno ou externo (alcance mínimo de 30m).
- Ambientes iluminados para desempenho ótimo dos sensores.
-
Recomendações de Armazenamento:
- Armazenar em um ambiente livre de poeira ou selado em plástico.
- Recarregar as baterias periodicamente para evitar danos.
- Manusear sensores ópticos e a laser com cuidado usando um pano de microfibra.
Vantagens
- Código fonte fácil de ler e amigável para iniciantes.
- Perfeito para personalização e experimentação DIY.
- Desempenho de voo estável com alta confiabilidade.
O Kit de Drone DIY STM32 combina tecnologia de ponta, oportunidades de aprendizagem prática e componentes modulares robustos, tornando-se a escolha ideal para quem procura dominar sistemas de voo de drones e programação embutida.



Kit da Placa de Desenvolvimento STM32 T3K04-745 com MCU STM32, NRF2A LoI+ e STM3Z F1 O3C. Inclui adaptador SWD e EEPROM 24C02. Suporta programação via interface IFI#.
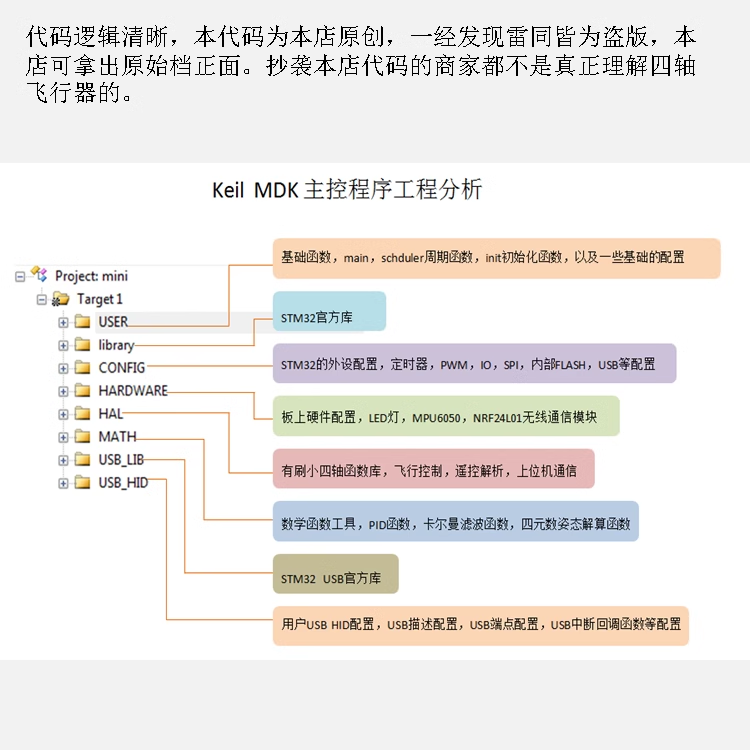
Projeto mini Target 1: Configuração da biblioteca STM32 do usuário. O projeto utiliza o agendador principal JAMAEEI, inicializa MATH USB_LIB, utiliza HAL para componentes de hardware como LED, MPU6000, NRF24L01E. Inclui também USB_HID e WF03IA para comunicação USB. Além disso, utiliza PID, TR-103, e Wt32.c para funções USB do STM32. O projeto apresenta alguns erros, incluindo - USB 4623, usbpu@a038nz.
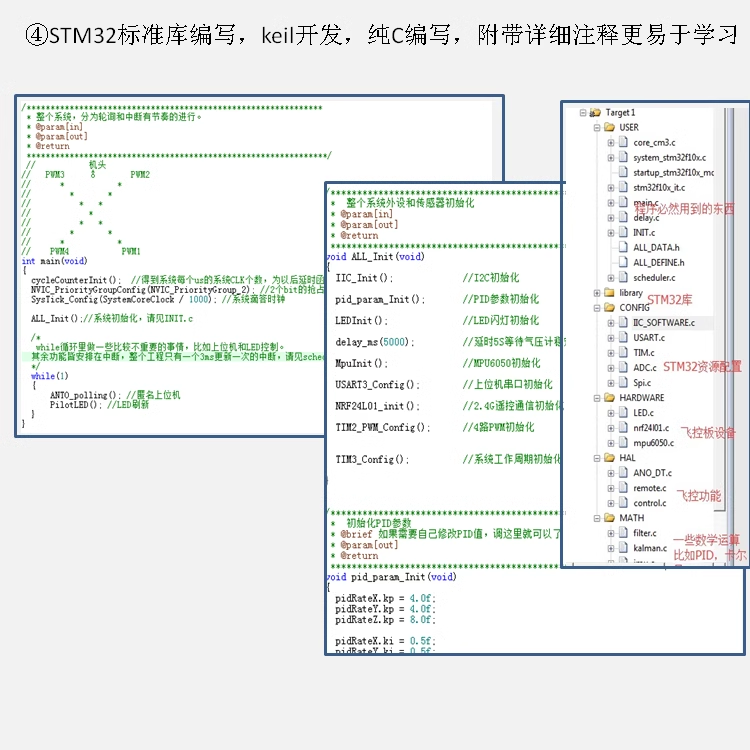
STM32 TMEF9AE, módulo Kielte com ICs 2C4R e M14*E5+4A. Hardware alvo para desenvolvimento de sistemas com MCU STM32. Inclui AL_Init, I2c Init, PID_Init, LED_Init, USART, TIM, ADC e outros módulos.
Tecnologia de Fluxo de Ar Xtreme TFAO ventilador principal para ZMS. As características incluem agendamento e Kpilstn Araer IIC-Dsl mpuboso.c EiR com 4Wz Rruald MELXES #TE#epu6o50 c MC, SPI, Mpugo5d.