Stm32 quadcopter kit diy de código aberto-placa de aprendizagem de estudante de fluxo óptico a laser pcb + rack de depuração de parâmetros pid
Stm32 quadcopter kit diy de código aberto-placa de aprendizagem de estudante de fluxo óptico a laser pcb + rack de depuração de parâmetros pid
RCDrone
Não foi possível carregar a disponibilidade de recolha
Visão geral
O STM32 faça você mesmo Kit Quadcopter de código aberto é uma solução abrangente para estudantes, amadores e desenvolvedores que desejam experiência prática em programação de drones, dinâmica de voo e desenvolvimento de hardware. Apresentando um Microcontrolador STM32F103C8T6, Giroscópio de 6 eixos MPU6050, e Módulo sem fio NRF24L01, este quadricóptero é equipado com tecnologias de ponta para um voo suave e estável. Seu estabilização de fluxo óptico combinado com sensores de pressão barométrica garante altitude precisa e bloqueio de posição, enquanto o firmware C de código aberto permite que os usuários modifiquem algoritmos de voo. Com portas IO personalizáveis, ajuste de parâmetros PID sem fio, e suporte para desenvolvimento secundário usando Keil MDK5, este quadricóptero oferece versatilidade incomparável para iniciantes e usuários avançados. Um poderoso Bateria 3.7V 1200mAh garante até 10 minutos de tempo de voo e o peso leve Moldura de 320 mm x 230 mm é projetado para estabilidade e portabilidade. O rack de depuração PID incluso aprimora ainda mais a experiência de aprendizado, tornando este kit ideal para projetos educacionais, competições e entusiastas de drones.
Principais características
-
Precisão do controle de voo:
- Equipado com Microcontrolador STM32F103C8T6 e Giroscópio MPU6050 para uma dinâmica de voo confiável.
- Módulo de fluxo óptico (PMW3901) e sensor barométrico (SPL06-001) permite manter a posição precisa e estabilizar a altitude (20 cm–400 cm).
-
Código aberto e programabilidade:
- Firmware totalmente de código aberto escrito em padrão C para fácil desenvolvimento secundário.
- Compatível com Keil MDK5 ambiente para projetos de programação avançada.
-
Controle sem fio:
- Apresenta um Módulo sem fio NRF24L01 suportando uma distância de controle de 50m+ em ambientes abertos.
- Sem fio Ajuste de parâmetros PID para os eixos X, Y, Z simplifica a otimização do voo.
-
Design de hardware robusto:
- Estrutura durável com 8520 motores escovados e Hélices de 13,5 cm para voos estáveis em ambientes internos e externos.
- Design leve (100g incluindo bateria) suporta cargas úteis de até 60g, tornando-o adequado para adicionar sensores ou câmeras.
-
Ferramentas de aprendizagem aprimoradas:
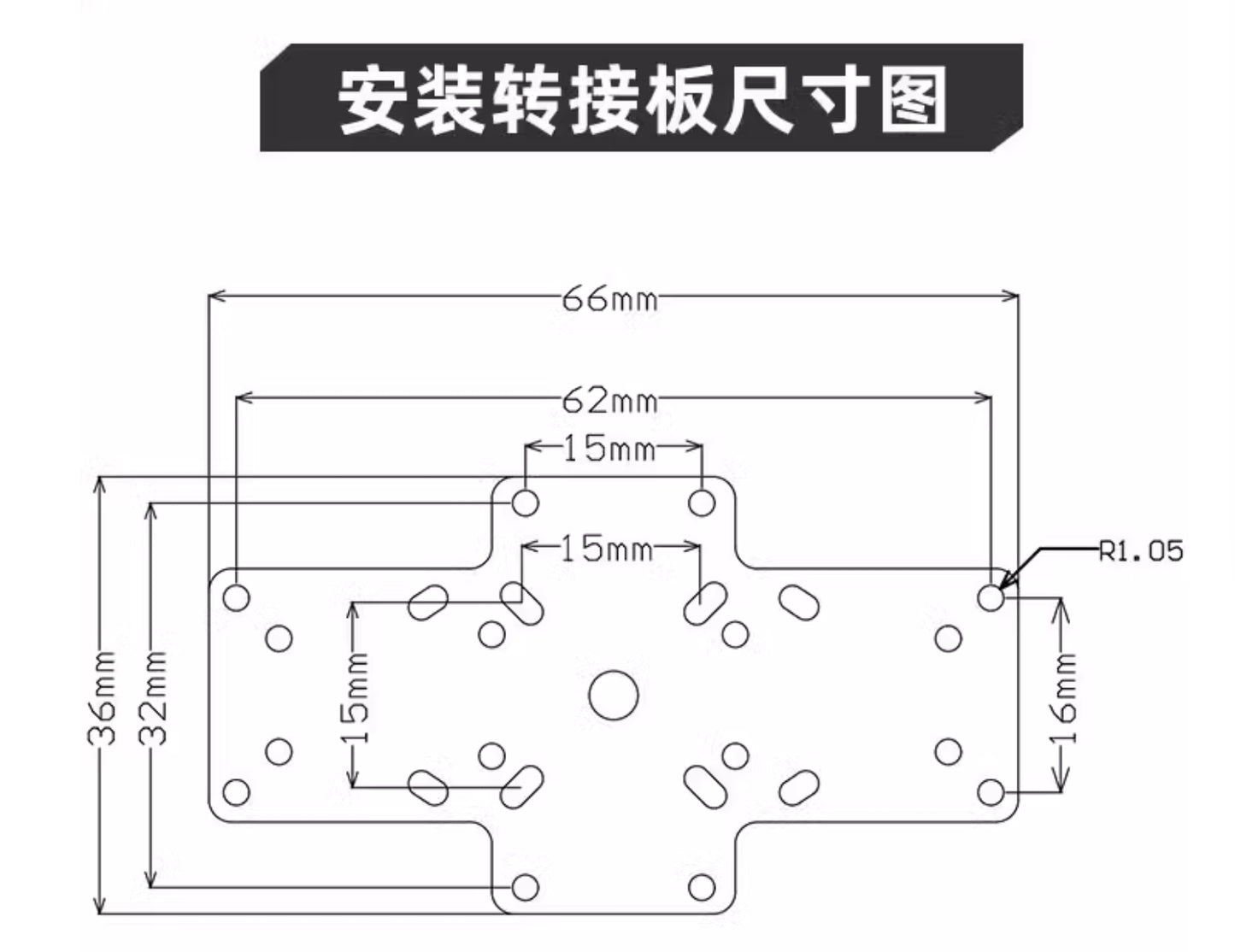
- Inclui um Rack de depuração PID para ajuste fino dos parâmetros PID.
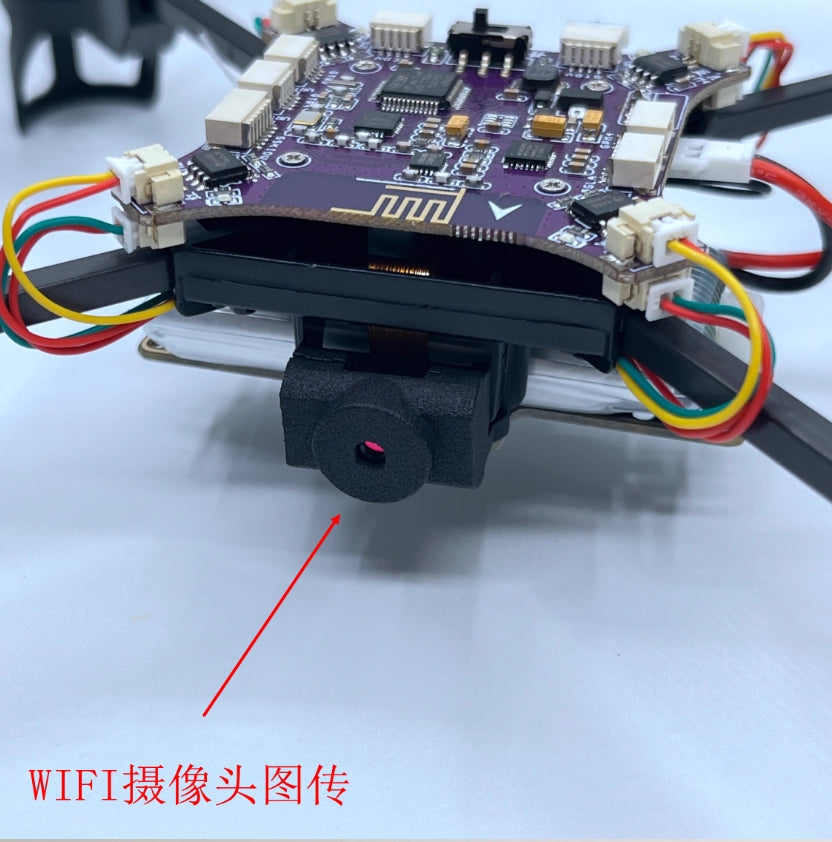
- Portas de E/S pré-soldadas suportam extensões como Interfaces de câmera Wi-Fi, SPI, UART, e Módulos IIC.
-
Sistema de bateria potente:
- Inclui 3,7 V 380 mAh e Baterias de 3,7 V 1200 mAh, oferecendo horários de voos de 5 a 10 minutos dependendo da carga útil e das condições.
- A proteção integrada contra sobrecarga e descarga garante a segurança da bateria.
-
Conexão Plug-and-Play:
- Conexão USB HID para transferência de dados em tempo real e ajustes de parâmetros via interface de computador.
- Interface de programação SWD fácil de usar, com suporte para ambos J-Link e Link ST depuradores.
Especificações técnicas
Quadricóptero
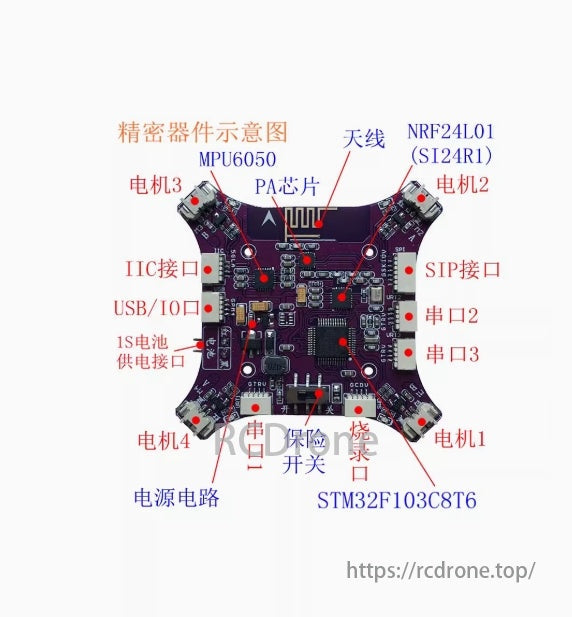
- Chip principal: STM32F103C8T6
- Giroscópio: MPU6050 (6 eixos)
- Módulo sem fio: NRF24L01 (SI24R1)
- Motorista: AO3400 (A09T)
- Motores: 8520 motores escovados
- Hélices: 13,5 cm (4 incluídos)
- Sensores: SPL06-001 (barômetro), PMW3901 (fluxo óptico)
- Bateria: 3,7 V 1200 mAh (voo de 10 minutos) + 3,7 V 380 mAh (voo de 5 minutos)
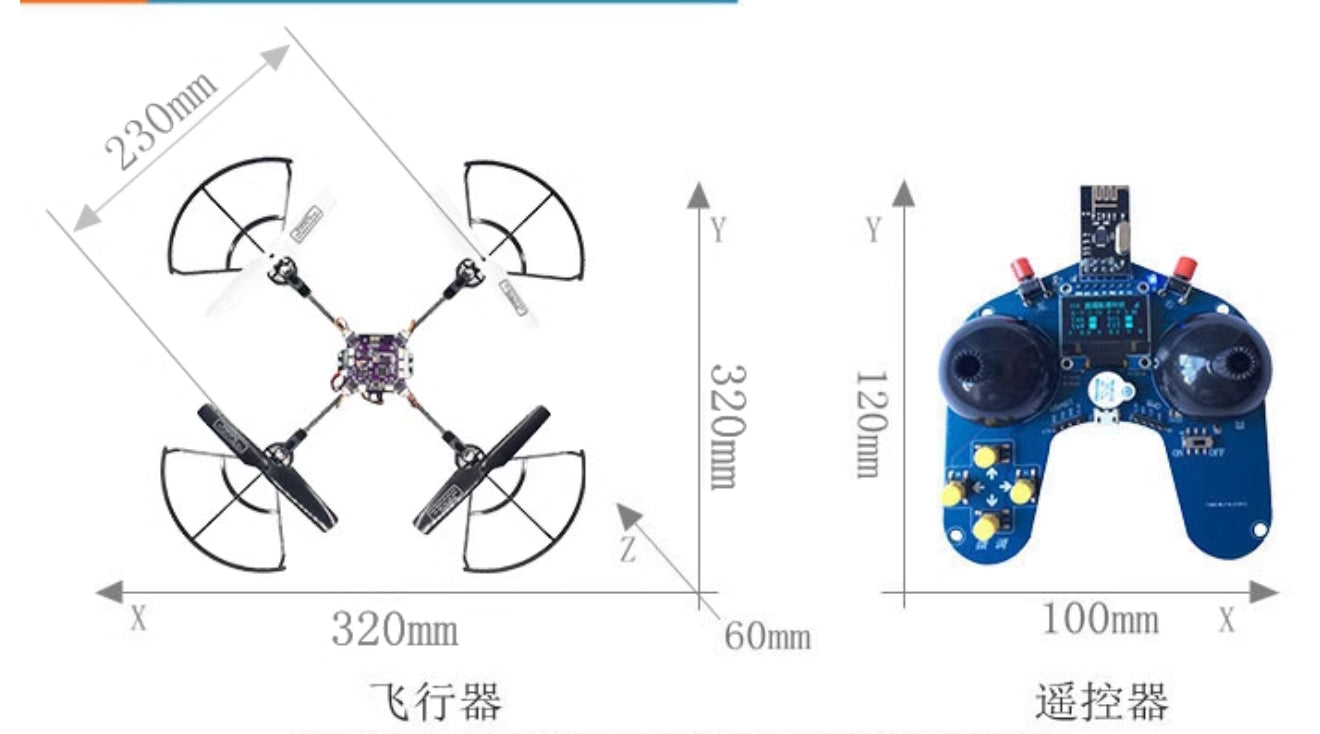
- Peso: 100g (incluindo bateria)
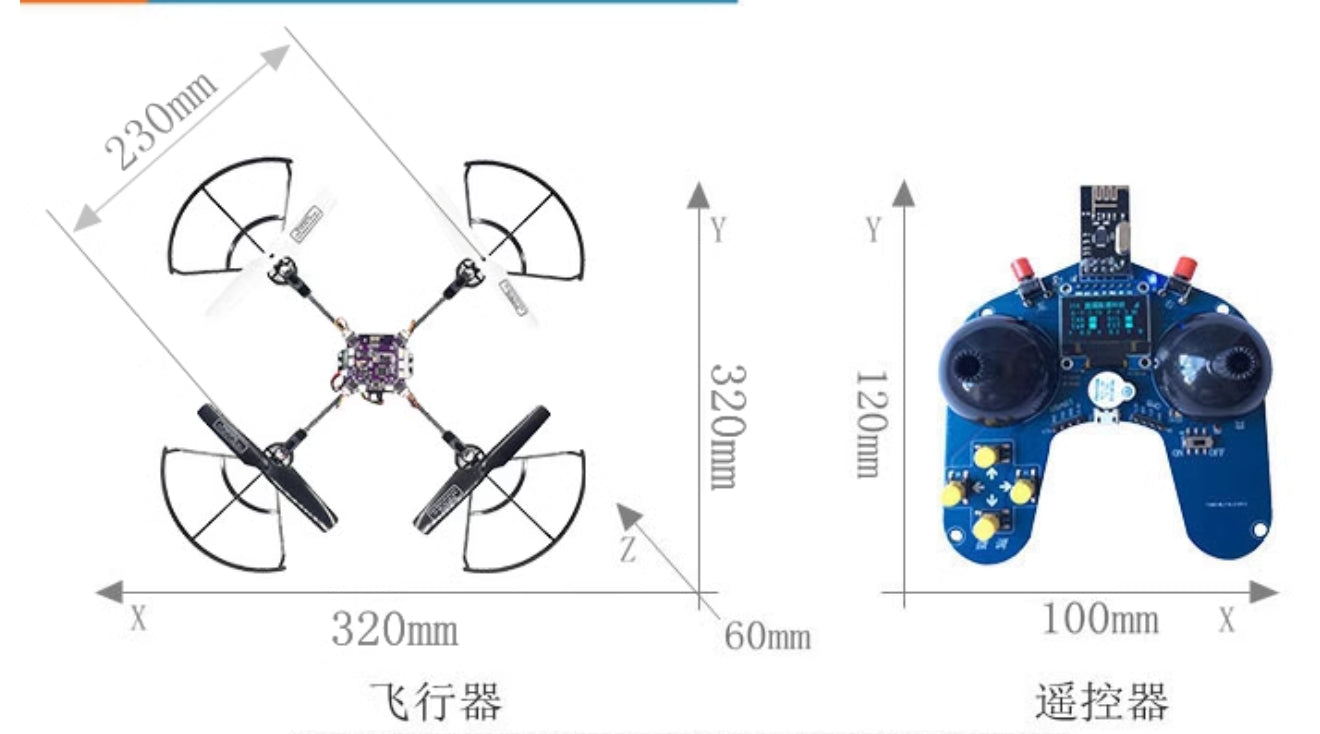
- Tamanho do quadro: 320 mm x 230 mm
- Portas adicionais: SPI x1, UART x2, IIC x1, USB IO x1
- Capacidade de carga útil: 60g
Controle remoto
- Chip principal: STM32F103C8T6
- Módulo sem fio: NRF24L01 (SI24R1)
- Mostrar: OLED de 0,96 polegadas
- Poder: Bateria 3.7V 380mAh
- Distância de controle: >50m (campo aberto)
- Tamanho: 12cm x 10cm
- Peso: 60g
- Recursos adicionais: Botões de calibração, interface de ajuste PID visualizada
Conteúdo da embalagem
- Quadro Quadcopter com eletrônica pré-montada (Controlador de voo baseado em STM32F103C8T6, MPU6050, SPL06-001, PMW3901).
- Controle remoto sem fio STM32 (com display OLED e módulo NRF24L01).
- Baterias:
- Bateria de lítio de 3,7 V e 1200 mAh x1 (tempo de voo de 10 minutos)
- Bateria de lítio de 3,7 V e 380 mAh x1 (tempo de voo de 5 minutos)
- Hélices de reposição (4 peças)
- Cabo de carregamento USB (compatível com 3,7 V–4,2 V)
- Fios de ligação (variado)
- Chave de fenda de precisão
- Rack de depuração PID
- Manual do usuário e tutoriais abrangentes (PDF e vídeo).
Recursos adicionais destacados
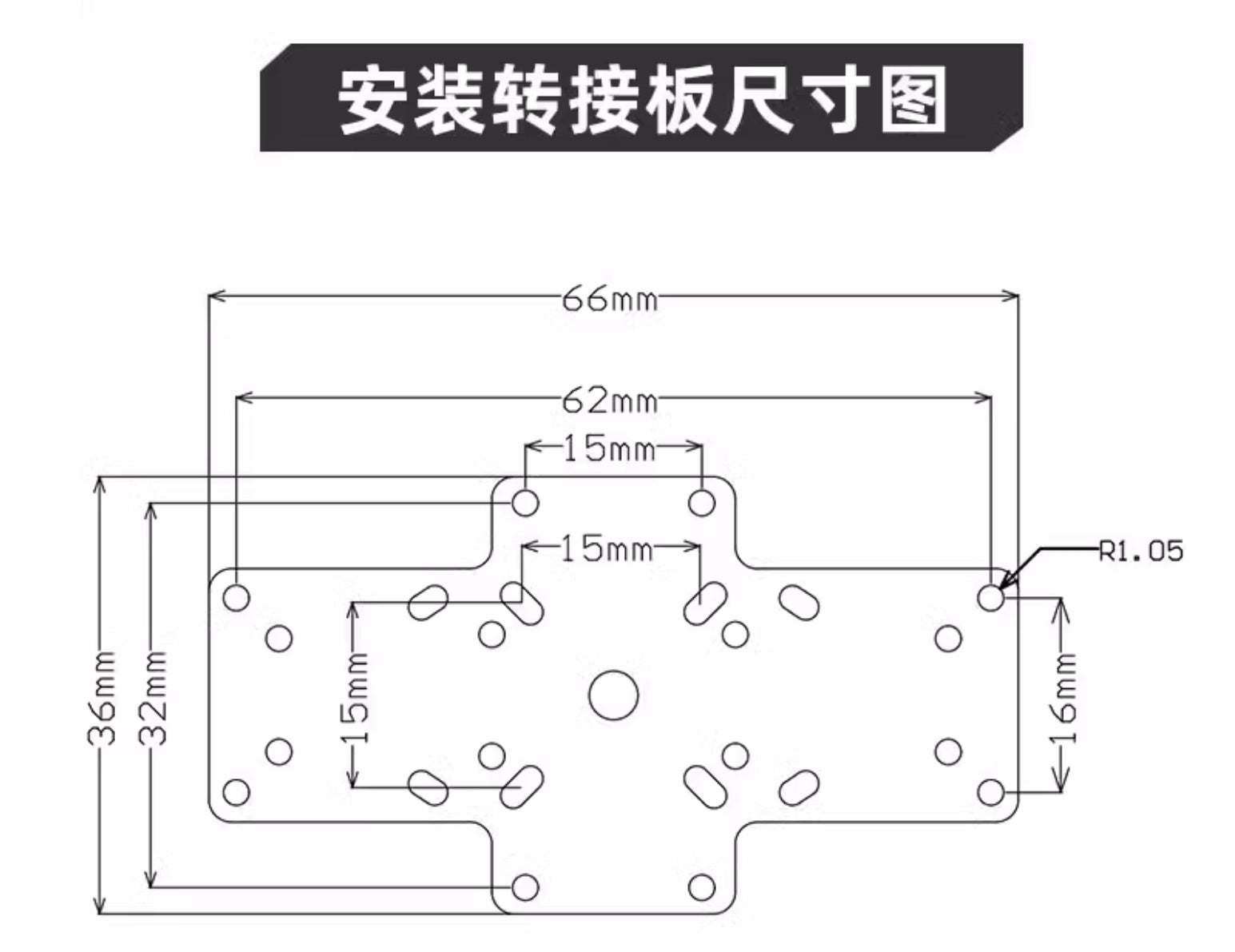
- Posicionamento preciso dos componentes: Cada parte soldada é marcada, incluindo portas para alimentação, SPI, IIC, USB e conectores de motor.
- Ferramentas de depuração modulares: O posicionamento do sensor de fluxo óptico e barométrico garante dados de voo precisos para ajuste de PID.
- Extensões da placa de desenvolvimento: Permite a integração de câmeras e sensores para fotografia aérea e gravação de vídeo.
- Interface visualizada: Dados do quadricóptero exibidos em tempo real via software de PC para depuração e otimização.
Aplicações:
- Uso educacional: Perfeito para projetos de aprendizagem STEM e cursos de engenharia.
- Competições: Ideal para Drone faça você mesmo desafios e competições de robótica.
- Amadores: Projeto envolvente para entusiastas e criadores de tecnologia.
- Desenvolvimento avançado: Oferece suporte ao desenvolvimento secundário para aplicativos personalizados.
Aviso de segurança:
Garanta condições de teste seguras usando o rack de depuração incluso. Evite voar em áreas lotadas ou perigosas. Siga as instruções de montagem e manuseie os componentes soldados com cuidado.
Com seu design modular, flexibilidade de código aberto e amplos recursos de aprendizagem, o kit quadricóptero STM32 DIY de código aberto é sua porta de entrada para dominar a tecnologia e a programação de drones.




Este é um conjunto de placa PCB para sistemas de televisão com chip STM3ZF103C8T6F, projetado para transmissão e recepção de vídeo de alta qualidade.


OnF STM32F Blue Pill, 7% i: STM32 BRB+ de alta frequência, 10 Ohm x 7 HhJfV: Controle remoto STM32. Tela: OLED de 0,96 polegadas IM Et: 2,4C IMHM: ~20°C a ~60°C JE+HFZ: >50x (Watt), EFt) 7ARh: 12cm x 6cm InLaR: 3,7V, 380mAh, Peso: 60g