Drone de pesquisa SU17 - Desenvolvimento de drone industrial de código aberto PX4 com LiDAR MID-360, SLAM de câmera quádrupla, EGO-Swarm
Drone de pesquisa SU17 - Desenvolvimento de drone industrial de código aberto PX4 com LiDAR MID-360, SLAM de câmera quádrupla, EGO-Swarm
RCDrone
Não foi possível carregar a disponibilidade de recolha
Visão geral
O SU17 Research Drone é um quadricóptero de alto desempenho com Bateria de 6000mAh, LiDAR MID-360 para mapeamento 3D, sistema SLAM de quatro câmeras para localização precisa e integrada Posicionamento GPS+GLONASS. Com um peso de decolagem de 2,3 kg e um capacidade de carga útil de 200 g, oferece 21 minutos de tempo de voo no modo de posicionamento visual. Alimentado pelo software Prometheus, ele suporta reconhecimento de alvos, planejamento de caminho e navegação autônoma, tornando-o um nível industrial solução para pesquisa e inovação.
Parâmetros de Hardware
Aeronave
| Parâmetro | Descrição |
|---|---|
| Tipo de aeronave | Quadricóptero |
| Peso de decolagem (aprox.) | 2,3 kg (com capa protetora e bateria) |
| Distância diagonal | 320 milímetros |
| Dimensões | Comprimento: 442 mm, Largura: 388 mm, Altura: 174 mm (excluindo capa protetora) |
| Carga Útil Máxima | 200 g |
| Tempo de voo pairando | Aproximadamente 13 min (com hover em 100%, não abaixo de 0%), posicionamento visual: 21 min |
| Precisão de pairar | GPS: Vertical ±1,5 m, Horizontal ±2,0 m |
| SLAM 3D LiDAR: Vertical ±0,08 m, Horizontal ±0,08 m | |
| SLAM visual de 4 câmeras: Vertical ±0,05 m, Horizontal ±0,05 m | |
| Nível de resistência ao vento | Nível 4 |
| Temperatura de operação | -10°C a 40°C |
| Chip MCU principal | STM32H743 |
| UMI | ICM42688/IMC088 |
| Barômetro | MS5611 |
| Bússola | QMC5883L |
| Interface | USB Tipo C |
Computador de bordo
| Parâmetro | Descrição |
|---|---|
| Processador | Intel Core i5-8365U |
| Capacidade de memória | 8 GB |
| Frequência de memória | LPDDR3@2133MHz |
| Armazenar | SSD NVMe de 256 GB |
| Porta de rede | Baidu Apollo Ethernet X2, 12V@3A powefornecimento r, suporta IEEE 1588-2008 (PTP v2) |
| Porta serial | Porta serial TTL X2, 5V/3.3V@500mA power fornecimento |
| USB | Tipo C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
Bateria de energia
| Parâmetro | Descrição |
|---|---|
| Modelo | SU17-L |
| Tipo de Bateria | Bateria de polímero de lítio de alta pressão |
| Tensão nominal | 26,4 V (máx.), 21 V (mín.) |
| Tensão de armazenamento | 22,8 V (típico) |
| Capacidade Nominal | 6000mAh |
| Peso | 680 g |
| Dimensões | Comprimento: 85,2 mm, Largura: 86.5 mm, Altura: 135 mm |
Controle remoto
| Parâmetro | Descrição |
|---|---|
| Modelo | QE-2 |
| Canais | 8 |
| Potência de transmissão | 18~20 dBm |
| Peso | 294,1 g |
Gimbal
| Parâmetro | Descrição |
|---|---|
| Ângulo controlável | -90° ~ 30° (eixo de inclinação) |
| Protocolo de streaming | RTSP (padrão) |
| Formato de codificação | H.264 |
| Resolução | 1080P a 25 fps |
| Campo de visão diagonal (D) | 120° |
| Campo de visão vertical (V) | 54° |
| Campo de visão horizontal (H) | 95° |
Transmissão de Imagem
| Parâmetro | Descrição |
|---|---|
| Frequência de operação | 2,4 GHz |
| Potência de transmissão | 18dBm |
| Alcance da comunicação | 3Km (Sem Interferência, Sem Obstáculo) |
| Alcance da imagem | 1Km (Interferência Mínima, Sem Obstáculos) |
| Largura de banda máxima | 40 Mbps |
Câmera de profundidade quádrupla
| Parâmetro | Descrição |
|---|---|
| Acelerador de Visão | VPU Intel Movidius Myriad X |
| Resolução Máxima | 1296x816 |
| Taxa máxima de quadros | 1280x800 a 120 fps |
| Tipo de obturador | Obturador global |
| Formato de codificação | Fluxo único de 8/10 bits |
| Campo de visão | Campo de visão diagonal de 150°, campo de visão horizontal de 127,4°, campo de visão vertical de 79,7° |
| Número de sensores | 4 (2 dianteiros + 2 traseiros) |
| UMI | IMC270 |
GNSS
| Parâmetro | Descrição |
|---|---|
| Precisão horizontal | 1,5 m CEP (com SBAS) |
| Precisão de velocidade | 0,05 m/s |
| Modo de operação | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
Carregador
| Parâmetro | Descrição |
|---|---|
| Modelo | LK150-2640500 |
| Tensão de entrada CA | 100 V ~ 240 V |
| Tensão de entrada CC | 26.4V |
| Peso | 460 g |
| Corrente de carga | 5A |
LiDAR 3D
| Parâmetro | Descrição |
|---|---|
| Modelo | MID-360 |
| Comprimento de onda do laser | 905 nm |
| Faixa de medição | 40 m @ 10% de refletividade |
| Campo de visão | Horizontal 360°, Vertical -7° ~ 52° |
| Alcance mínimo | 0,1 m |
| Frequência de ponto | 10 Hz (típico) |
| Saída de ponto | 200.000 pontos/s |
| Interface de dados | Ethernet 100 BASE-TX |
| Sincronização de dados | IEEE 1588-2008 (PTP v2), GPS |
| IMU integrado | ICM40609 |
| Tensão de alimentação | 7~27V |
| Dimensões | 65 mm (L) x 65 mm (P) x 60 mm (A) |
| Peso | 115 g |
| Temperatura de operação | -20°C ~ 55°C |
Parâmetros de software
Computador de bordo
| Parâmetro | Descrição |
|---|---|
| Modelo | Intel Core i5-8365U |
| Sistema | Ubuntu 20.04 |
| Nome de usuário | amo |
| Senha | amo |
| ROS | noético |
| CV aberto | 4.7.0 |
| Sistema de Posicionamento Visual | BSA_SLAM V1 |
Software Prometeu
| Parâmetro | Descrição |
|---|---|
| Versão | v2.0 |
| Sistema PrometheusGroundStation | v1.24.11.27 (versão final baseada no registro de lançamento do Wiki) |
Detalhes
Edição de Pesquisa SU17
Drone de pesquisa de qualidade de nível industrial
- LiDAR 3D opcional: Permite mapeamento, posicionamento e prevenção de obstáculos na navegação.
- Software de drone autônomo Prometheus: Rico em demonstrações para rápido domínio do controle do drone.
- Plataforma de voo de nível industrial: Estável e aberto, estabelecendo um novo padrão para desempenho de drones de pesquisa.

Principais características
A Pesquisa SU17 Plataforma de desenvolvimento de drones (referido como SU17) adota um design integrado, incorporando controladores de voo, computadores de bordo, módulos SLAM de quatro câmeras, câmeras de nuvem e módulos de transmissão de imagem para integração de alto nível, melhorando significativamente a estabilidade e a confiabilidade do hardware. Equipado com o software de drone autônomo Prometheus, o SU17 suporta recursos como reconhecimento de alvo, rastreamento e planejamento de caminho para vários cenários de controle de voo.
Ele integra opcionalmente o MID-360 3D LiDAR, combinado com o algoritmo FAST-LIO para atingir 3D LiDAR SLAM, oferecendo informações precisas de sensoriamento ambiental e posicionamento. Emparelhado com o algoritmo de planejamento de caminho EGO-Swarm, ele permite mapeamento 3D eficiente em tempo real e prevenção de obstáculos em ambientes complexos.




Sistema de software Prometheus V2
A plataforma de desenvolvimento é construída na estrutura de código aberto ROS e Prometheus, oferecendo funcionalidades ricas e extensas APIs de desenvolvimento secundário para reprogramação eficiente. Ela fornece acesso a informações de posicionamento, modos de voo, status da bateria, dados IMU e outras interfaces de dados de sensor e estado do drone, juntamente com interfaces de controle para posição, velocidade, aceleração e atitude.
Além disso, inclui exemplos de uso para APIs relacionadas. Além disso, o drone apresenta funções de verificação de segurança para operações de voo (anti-crash), permitindo descida automática em condições anormais, reduzindo o risco de colisões e garantindo um processo de desenvolvimento mais seguro.

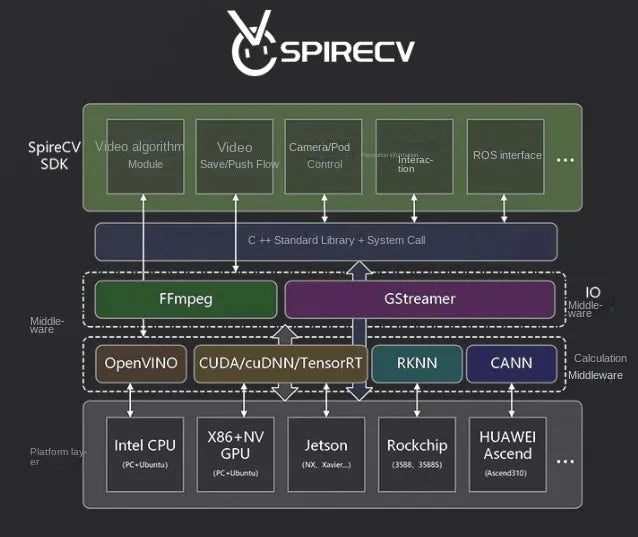
Biblioteca de Visão SpireCV
A SpireCV Vision Library é um SDK de processamento de imagem em tempo real projetado especificamente para sistemas UAV inteligentes. Ela fornece funcionalidades como controle de gimbal e câmera, armazenamento e streaming de vídeo, detecção de alvo, reconhecimento e rastreamento.
Este SDK visa oferecer alto desempenho, confiabilidade e uma interface simplificada para desenvolvedores de sistemas UAV inteligentes. Com uma solução de processamento visual rica em recursos, ele permite que os desenvolvedores implementem com eficiência vários aplicativos complexos baseados em visão.
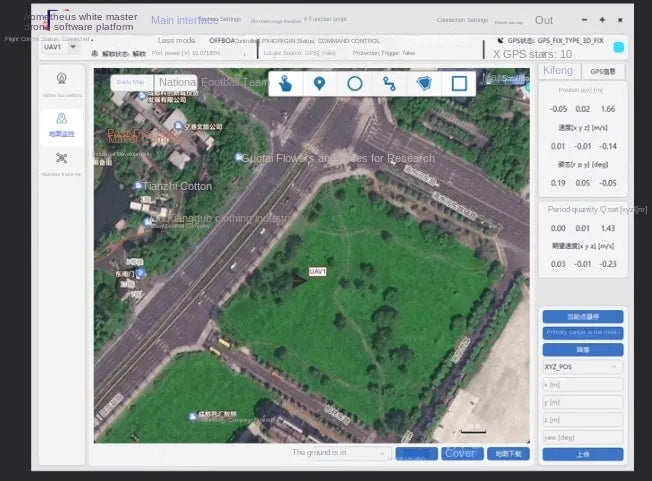
Estação terrestre Prometheus
A Prometheus Ground Station é uma interface de interação humano-drone desenvolvida com base no sistema Prometheus, construída usando tecnologia Qt. Ela permite a replicação rápida das funcionalidades do sistema Prometheus, fornecendo monitoramento em tempo real e visualização 3D do status do drone e dados de controle.
Por meio da estação terrestre, os usuários podem executar comandos como decolagem com um clique, pairar na posição atual, pouso e controle de posição. Além disso, o sistema suporta botões de função personalizados para iniciar scripts definidos pelo usuário ou enviar mensagens personalizadas, melhorando significativamente a conveniência, eficiência e escalabilidade das operações do usuário.
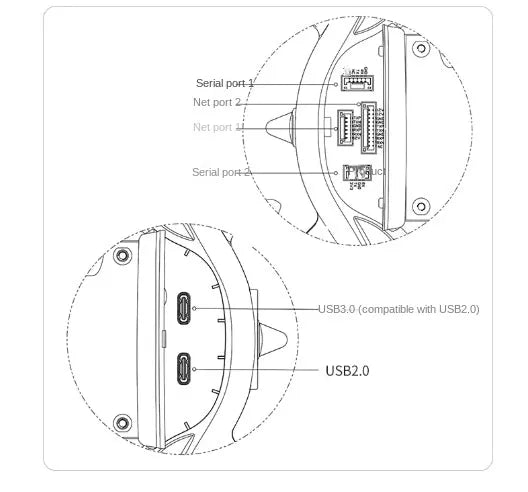
Expansão poderosa
Portas de expansão de hardware
-
Porta serial 1
-
Porta serial 2
-
Porta de rede 1
-
Porta de rede 2
-
Portas USB:
- USB 3.0 (compatível com USB 2.0)
- USB 2.0
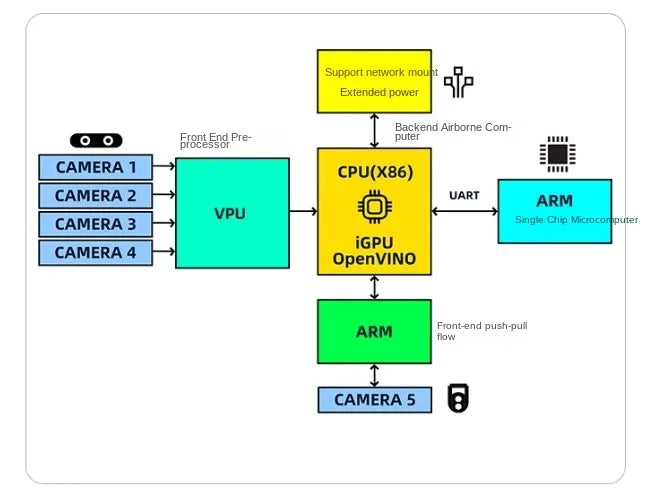
Estrutura de Hardware
A imagem ilustra a arquitetura de hardware do drone SU17, destacando a integração de vários componentes para processamento avançado de dados e controle do sistema:
-
Câmeras (câmera 1-4):
Conectado a um VPU (Unidade de Processamento de Visão) para pré-processamento front-end. -
VPU:
Lida com dados visuais de diversas câmeras e os encaminha para as unidades de processamento. -
Processador (X86) com iGPU e OpenVINO:
Serve como a principal unidade computacional para processamento de backend, suportando recursos de expansão conectados à rede para maior poder computacional. -
Microcontrolador ARM Single-Chip:
Interage com a CPU por meio de uma interface UART para funcionalidades de controle adicionais. -
Pipelining Front-End e Câmera 5:
Gerenciado por um processador ARM dedicado para maior otimização de dados.
Esta estrutura integra múltiplas unidades de processamento, suportando análise de imagem em tempo real, tarefas computacionais avançadas e comunicação contínua entre componentes de hardware. Ela garante o manuseio eficiente de operações complexas em aplicações de pesquisa e desenvolvimento.
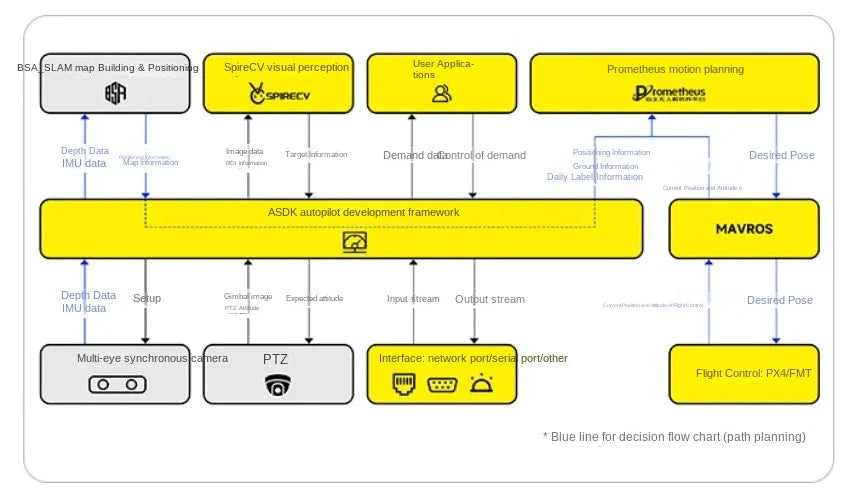
Estrutura de software
O diagrama ilustra a arquitetura de software do drone SU17, destacando a integração de vários sistemas para funcionalidade autônoma:
-
BSA_SLAM (Mapeamento e Localização):
- Fornece mapeamento espacial e dados de posicionamento.
- Integra entradas de sensor de profundidade e IMU para percepção precisa do ambiente.
-
SpireCV Visão Percepção:
- Processa dados visuais, incluindo detecção de objetos, informações de ROI e rastreamento de alvos.
-
Aplicações do usuário:
- Interfaces para tarefas orientadas pelo usuário, como visualização de dados e entrada de comandos.
-
Planejamento de movimento Prometheus:
- Lida com o planejamento de trajetória usando dados de posição, velocidade e alvo.
-
Estrutura de direção autônoma ASDK:
- Atua como camada de processamento central, gerenciando o fluxo de dados entre sensores, câmeras, módulos de nuvem e interfaces externas.
- Suporta múltiplos canais de entrada/saída (por exemplo, portas de rede, portas seriais).
-
MAVROS:
- Comunica-se com sistemas de controle de voo (PX4/FMT) para controle de estado e posição de voo.
-
Módulo de Nuvem e Câmeras Multi-Sync:
- Integra dados baseados em nuvem para processamento avançado.
- Sincroniza entradas visuais para operações de alta precisão.
Linhas Azuis: Representam caminhos de tomada de decisão para planejamento de trajetória.
Esta arquitetura demonstra um design modular e extensível, permitindo uma comunicação perfeita entre vários componentes de hardware e software para uma operação robusta do drone.
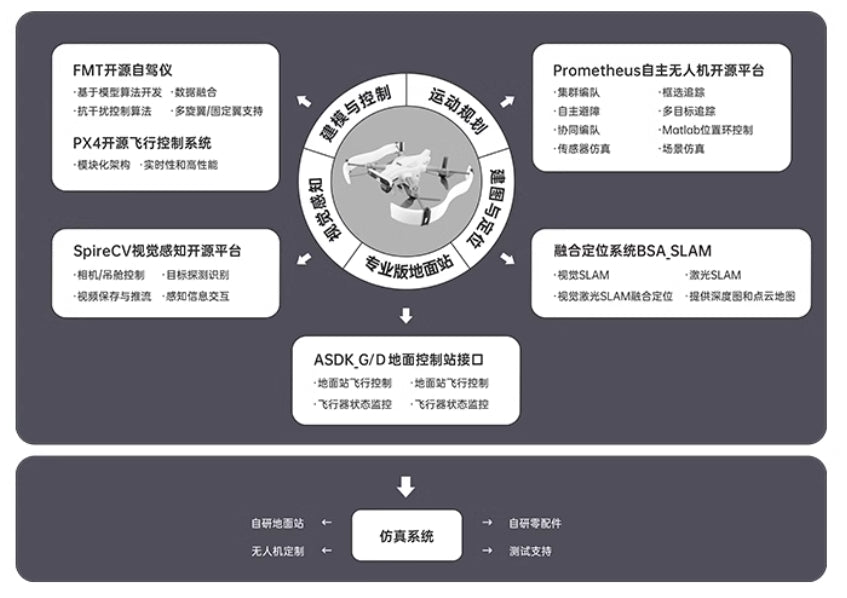
Abertura Inteligente: Solução Integrada de Sistema UAV
O diagrama apresenta uma arquitetura abrangente e aberta para sistemas de drones, enfatizando a modularidade e a integração entre vários componentes:
-
Componentes principais:
- Piloto automático de código aberto FMT: Fornece controle de voo confiável com base no desenvolvimento modular, suportando diversos ambientes e integração de dados.
- Sistema de controle de voo PX4: Garante estabilidade e suporta personalização modular avançada.
- Plataforma de Percepção de Visão SpireCV: Concentra-se no processamento de imagens, incluindo detecção de objetos, rastreamento e streaming de vídeo em tempo real.
-
Estruturas-chave:
- Plataforma UAV autônoma Prometheus: Inclui controle de vários drones, planejamento de movimento, navegação colaborativa e simulações do mundo real.
- Sistema BSA_SLAM: Combina SLAM baseado em visão e SLAM baseado em LiDAR para posicionamento e mapeamento precisos.
- Interface de controle de estação terrestre ASDK G/D: Permite comunicação perfeita entre estações terrestres e UAVs para monitoramento e ajustes em tempo real.
-
Integração de fluxo de trabalho:
- Destaca processos como planejamento de movimento, mapeamento de ambiente e navegação autônoma.
- Integração com estações terrestres profissionais para controle de trajetória, prevenção de obstáculos e gerenciamento de dados em tempo real.
-
Suporte de Simulação:
- Inclui um sistema de simulação para testes de missão autônoma, controle de UAV e validação de componentes.
Este sistema demonstra uma solução de ponta para o desenvolvimento de UAV autônomos, com recursos escaláveis para pesquisa, aplicação e testes em diversos cenários.
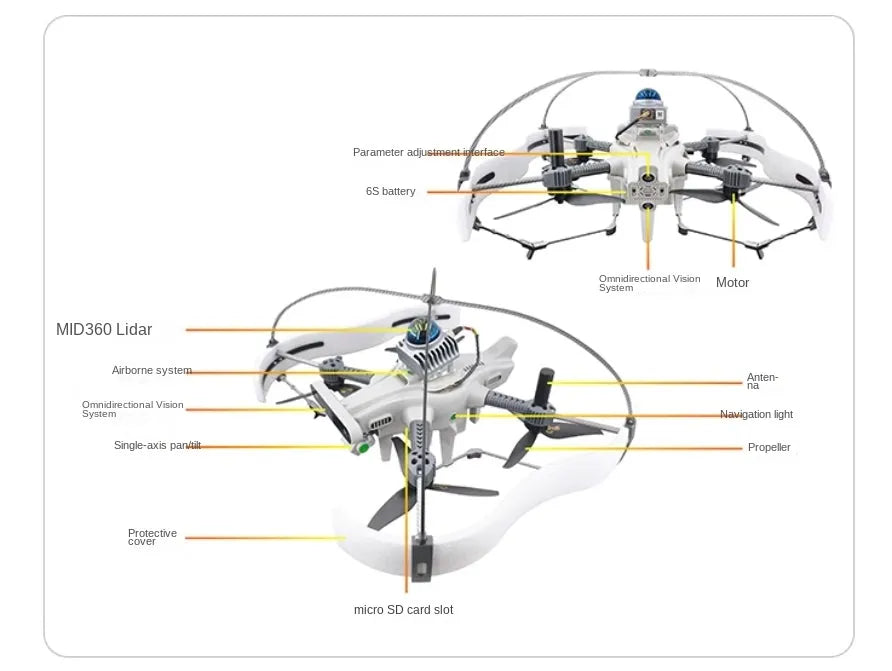
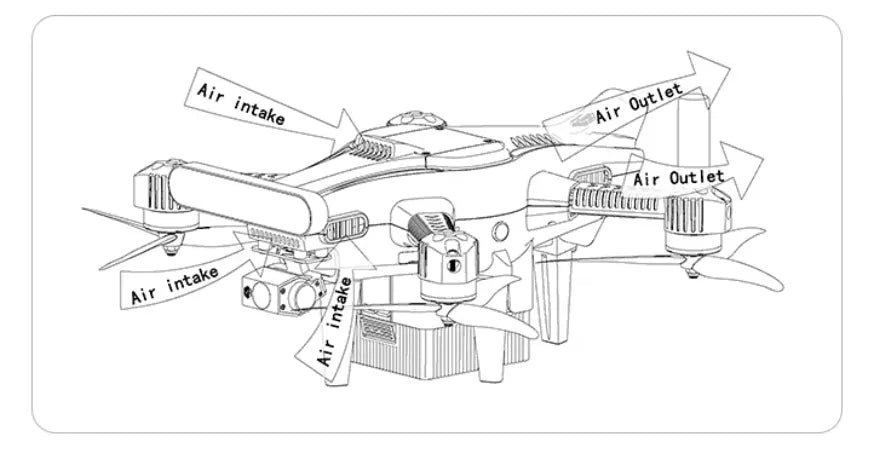
os componentes estruturais do drone de pesquisa SU17, enfatizando sua estabilidade e design avançado. Os principais recursos incluem o MID360 LiDAR para mapeamento preciso, um sistema de visão omnidirecional para uma percepção ambiental abrangente, uma gimbal de eixo único para imagens estabilizadas e um robusto Bateria 6S para maior potência. Outros componentes essenciais incluem o sistema de hélice, antena, luzes de navegação, e um Slot para cartão micro SD para armazenamento de dados. O design integra hardware de ponta, garantindo confiabilidade e alto desempenho para várias aplicações de pesquisa.
Related Collections