Junta robótica integrada Ti5 CRA-RI50-70-PRO-XX - Engrenagem harmônica, eixo oco, 24–48V 150W, codificador de 17 bits, CAN/EtherCAT
Junta robótica integrada Ti5 CRA-RI50-70-PRO-XX - Engrenagem harmônica, eixo oco, 24–48V 150W, codificador de 17 bits, CAN/EtherCAT
Ti5 Robot
Não foi possível carregar a disponibilidade de recolha
Visão geral
O robô Ti5 CRA-RI50-70-PRO-XX é uma junta robótica integrada de eixo oco e compacta que combina uma redutor harmônico de precisão, motor de torque sem moldura, Unidade FOC, e codificador absoluto em um módulo. Com um 80 mm de diâmetro externo, Furo passante de 10 mm, 150 W de potência, e 24–48 V fornecimento, ele entrega até Pico de 34 N·m (dependente da razão) com reação quase nula e baixo ruído. A comunicação é selecionável entre PODE e EtherCAT; codificadores simples ou duplos e um freio eletromagnético A variante (-B) está disponível. Esta junta foi projetada para robôs colaborativos, manipuladores móveis, gimbals com rotação horizontal e vertical, equipamentos industriais, robôs de inspeção de energia e plataformas marítimas.
Principais características
-
Junta tudo-em-um: redutor harmônico + motor de torque BLDC + driver FOC + encoder absoluto em um corpo compacto selado.
-
Eixo oco: Passagem central de 10 mm para cabos/linhas aéreas.
-
Feedback de alta precisão: codificador absoluto de 17 bits, memória multi-voltas de desligamento; codificador simples/duplo opções.
-
Saída de baixa folga: estágio harmônico com ~10–20 segundos de arco reação (por proporção).
-
Quieto & suave: motor de torque com grande contagem de polos para estabilidade em baixa velocidade e baixo ruído acústico.
-
Opções de interface: PODE ou EtherCAT ônibus; opcional freio de retenção (sufixo do modelo -B).
-
Personalizável: versões à prova d'água/baixa temperatura disponíveis de fábrica.
Modelos & Opções
-
CRA-RI50-70-PRO-XX - padrão, sem freio (≈ 60 ± 0,5 mm comprimento, ≈0,65 kg, inércia ≈ 124 g·cm²)
-
CRA-RI50-70-PRO-XX-B — com freio (comprimento ≈81,7 ± 0,5 mm)
-
Ônibus: PODE ou EtherCAT
-
Codificador: Solteiro ou Dual codificador
Desempenho avaliado por relação de transmissão
| Relação de transmissão | Torque de pico de partida/parada (N·m) | Torque de carga médio máximo (N·m) | Torque nominal @ 2000 rpm/relação (N·m) | Velocidade de pico de saída (rpm) | Velocidade nominal a ½ rpm | Reação (arco-segundo) |
|---|---|---|---|---|---|---|
| 51:1 | 23 | 8.6 | 6.6 | 97 | 75 | 20 |
| 81:1 | 29 | 13,5 | 9.6 | 61 | 46 | 20 |
| 101:1 | 34 | 13,5 | 9.6 | 49 | 37 | 10 |
Observações: Os valores de velocidade/torque de saída são referentes à saída do redutor. A especificação de menor folga se aplica à variante 101:1.
Elétrica &Dados do motor
-
Poder: 150 W
-
Tensão de alimentação: 24–48 VCC
-
Corrente máxima contínua: 5 A | Corrente nominal: 3,6 A | Resistência de fase: 0.47 Ω
-
Constante de torque: 0,089 N·m/A | Indutância: 0,215 mH | Pares de pólos: 10
-
Resolução do codificador: absoluto de 17 bits (memória desligada)
-
Controle orientado a campo (FOC) integrado
Interface Mecânica
-
Diâmetro externo: Ø80 mm
-
Círculo de parafuso: Ø64 mm (flange frontal)
-
Furo passante: Ø10 mm
-
Comprimento total: 60 ± 0,5 mm (padrão) / 81,7 ± 0,5 mm (-B com freio)
-
Massa: ~0,65 kg (padrão)
-
Inércia (rotor): ~124 g·cm² (padrão)
-
A face frontal fornece vários fixadores M3; padrão de furos detalhado conforme desenho mecânico.
Conectividade
-
Ônibus: PODE ou EtherCAT
-
Variantes: Codificador único / Codificador duplo
-
Opção de freio: -B os modelos incluem um freio de retenção integrado.
Aplicações típicas
-
Braços robóticos colaborativos e de mesa, robôs de serviço
-
Gimbals e sistemas de câmera pan-tilt
-
UGVs móveis de manipulação e inspeção de energia
-
Módulos de automação industrial e equipamentos marítimos
O que está incluído
-
Junta integrada CRA-RI50-70-PRO-XX (proporção selecionada & opções)
-
Conectores de acoplamento ¶fusos básicos (por kit)
-
Desenho mecânico & pinagem (digital)
Código de pedido (exemplo)
CRA-RI50-70-PRO-XX-(B, T, 2E, IPXX)
-
XX: relação de transmissão (51/81/101)
-
B: com freio (em branco = sem freio)
-
T/2E: opções de codificador simples/duplo
-
IPXX: classificação à prova d'água opcional (mediante solicitação)
Detalhes

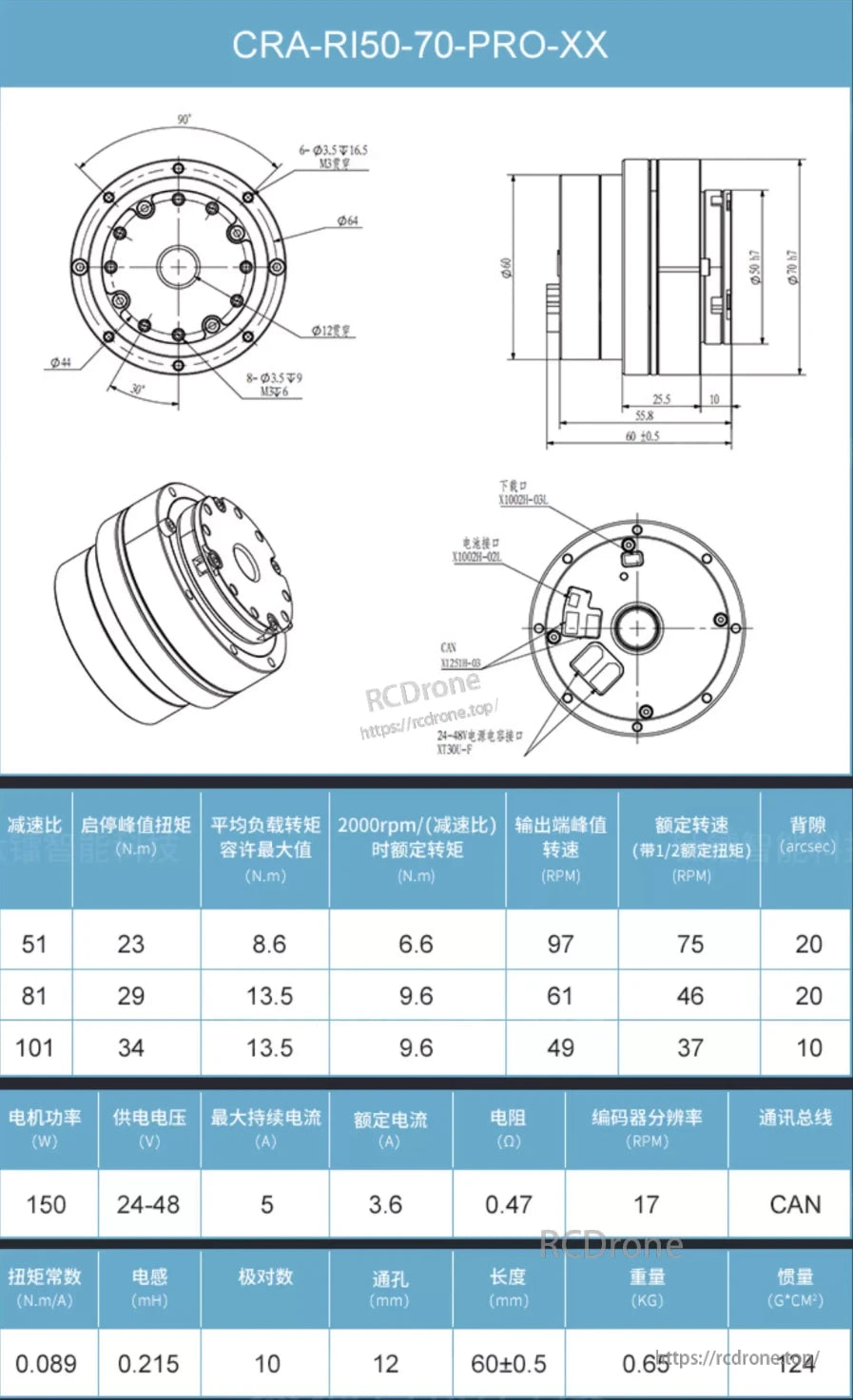
Especificações da junta robótica CRA-RI50-70-PRO-XX: motor de 150 W, 24-48 V, barramento CAN, relações de transmissão 51-101, torque máximo de até 34 N.m, comprimento de 60 ± 0,5 mm, peso de 0,65 kg, inércia de 124 g·cm².
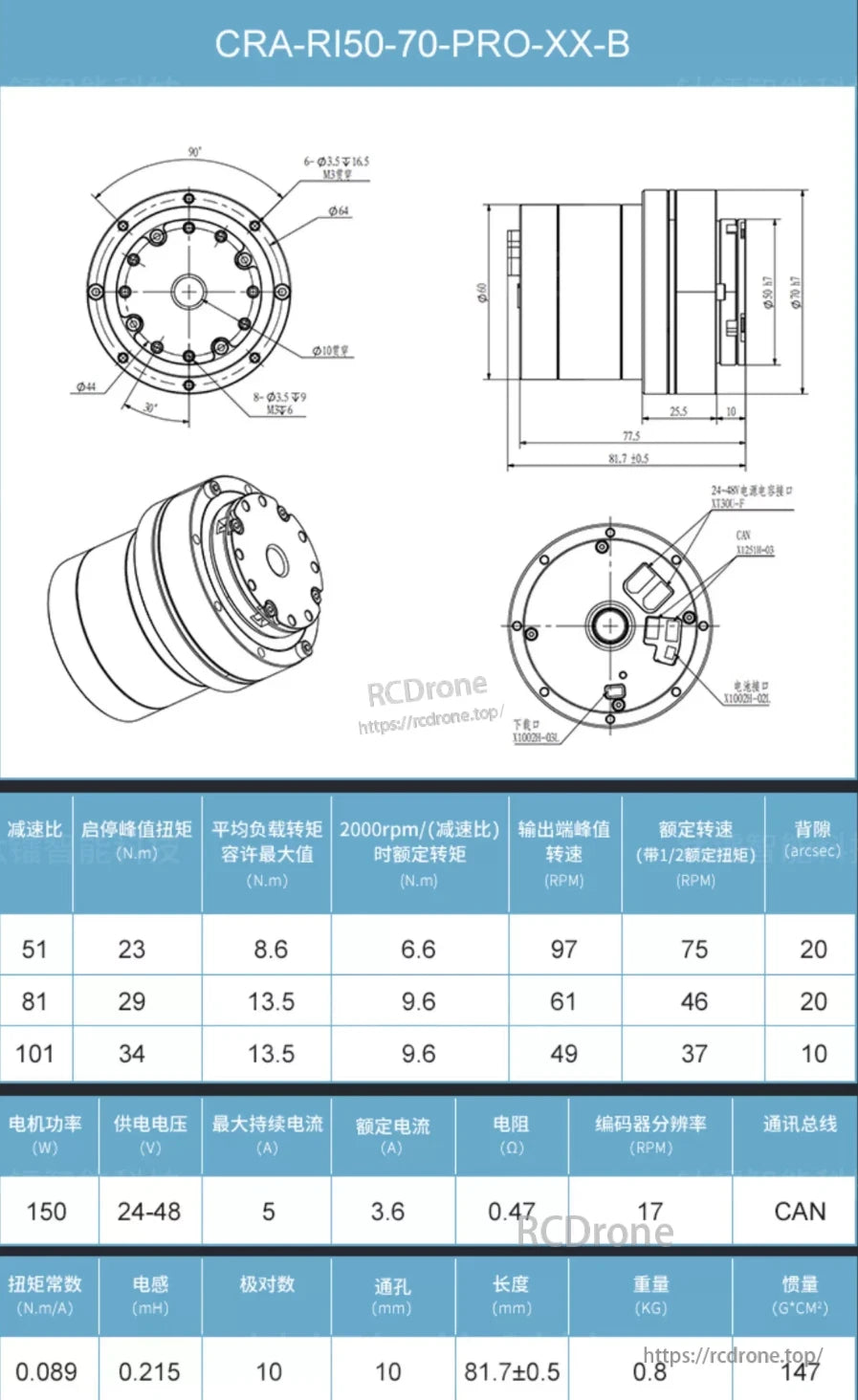
Junta robótica com relações de transmissão de 51, 81 ou 101, potência de 150 W, alimentação de 24–48 V, comunicação CAN, resolução de codificador de 17 RPM, comprimento de 81,7 ± 0,5 mm e peso de 0,8 kg.
Related Collections