






Atuador de junta integrado do robô Ti5 CRA-RI100-142-PRO-XX, 1 kW, 24–48 V, até 169 N·m, IP65, CAN/EtherCAT, 51–161:1, freio opcional
Atuador de junta integrado do robô Ti5 CRA-RI100-142-PRO-XX, 1 kW, 24–48 V, até 169 N·m, IP65, CAN/EtherCAT, 51–161:1, freio opcional
Ti5 Robot
Não foi possível carregar a disponibilidade de recolha
Visão geral
O Robô Ti5 CRA-RI100-142-PRO-XX é um atuador articulado compacto e integrado que combina um servomotor de ímã permanente, um redutor de precisão, um codificador e uma carcaça selada. Faz parte da série PRO, projetada para humanoides, exoesqueletos, cobots, AGVs e mecanismos industriais, apresentando alta densidade de torque, baixo ruído e proteção IP65. A interface do controlador é selecionável (CAN ou EtherCAT), o feedback pode ser codificador simples ou duplo, e um freio de retenção está disponível como uma opção. A Eixo oco de 32 mm simplifica o roteamento de cabos ou pneumáticos através da junta.
Principais características
-
Torque nominal de até 169 N·m (dependente da proporção) com saída suave e de baixo custo
-
IP65 selado carcaça para operação resistente a poeira e água
-
24–48 V CC, 1 kW classe PMSM com alta eficiência
-
CAN ou EtherCAT barramento de campo; codificador incremental simples/duplo (17 bits)
-
Freio de retenção opcional (-B) para posicionamento seguro e retenção de energia desligada
-
Saída de eixo oco (Ø32 mm); amigável para cabeamento direto
-
Vida longa & alta confiabilidade; baixo ruído, alta precisão
-
Chicote pré-cabeado (5 metros) para integração rápida
Especificações
Elétrica & Geral
-
Modelo: CRA-RI100-142-PRO-XX (-B = com freio)
-
Tipo de motor: Síncrono de ímã permanente
-
Potência nominal: 1000 W
-
Tensão de alimentação: 24–48 V CC
-
Corrente nominal: 15,8 A | Corrente contínua máxima: 16,9 A
-
Resistência de fase: 0,12 Ω | Indutância: 0,3 mH
-
Pares de pólos: 8 | Constante de torque: 0,175 N·m/A
-
Codificador: Incremental, 17 bits, simples ou duplo
-
Ônibus: PODE (EtherCAT selecionável)
-
Proteção: IP65
-
Faixa de rotação: 60°
-
Furo passante: Ø32 mm
-
Ambiente operacional: até 60 °C
-
Comprimento do cabo: 5 metros
Envelope mecânico
-
Sem freio: Comprimento 95,7 ± 0,5 mm, massa 3,8 kg, inércia do rotor 3601 g·cm²
-
Com freio (-B): Comprimento 115,7 ± 0,5 mm, massa 4,5 kg, inércia do rotor 4237 g·cm²
Nota: “100-142” no nome do modelo denota a classe de diâmetro externo nominal e a série de comprimento axial.
Desempenho por Taxa de Redução — Sem freio
| Razão | Torque de pico de partida/parada (N·m) | Torque de carga médio máximo permitido (N·m) | Torque nominal a 2000 rpm/relação (N·m) | Velocidade de pico de saída (rpm) | Velocidade nominal a ½ torque nominal (rpm) | Folga (arcsec) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Desempenho por Taxa de Redução — Com freio (-B)
As classificações de torque e velocidade são idênticas às da versão sem freio; dimensões/peso/inércia são diferentes (veja acima).
| Razão | Torque de pico de partida/parada (N·m) | Torque de carga médio máximo permitido (N·m) | Torque nominal a 2000 rpm/relação (N·m) | Velocidade de pico de saída (rpm) | Velocidade nominal a ½ torque nominal (rpm) | Folga (arcsec) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Aplicações
-
Robôs humanoides: articulações do ombro/quadril/joelho/tornozelo que requerem atuação selada e de alto torque
-
Robôs colaborativos (cobots): movimento suave e de baixo ruído com redundância do codificador
-
Exoesqueletos &dispositivos de reabilitação: juntas compactas de alto torque com segurando o botão de desligar (-B)
-
Gimbals &unidades de pan-tilt: posicionamento preciso com baixa folga
-
AGVs &máquinas especiais: áspero IP65 juntas para locais empoeirados ou úmidos
-
Automotivo &mecanismos marinhos: atuação selada para sistemas de movimento auxiliares
Detalhes

Especificações do atuador CRA-RI100-142-PRO-XX: 51-161 relações de engrenagem, 267-459 N.m torque máximo, motor de 1000 W, alimentação de 24-48 V, barramento CAN, peso de 3,8 kg, inércia de 3601 g·cm², resolução do encoder de 17 RPM.
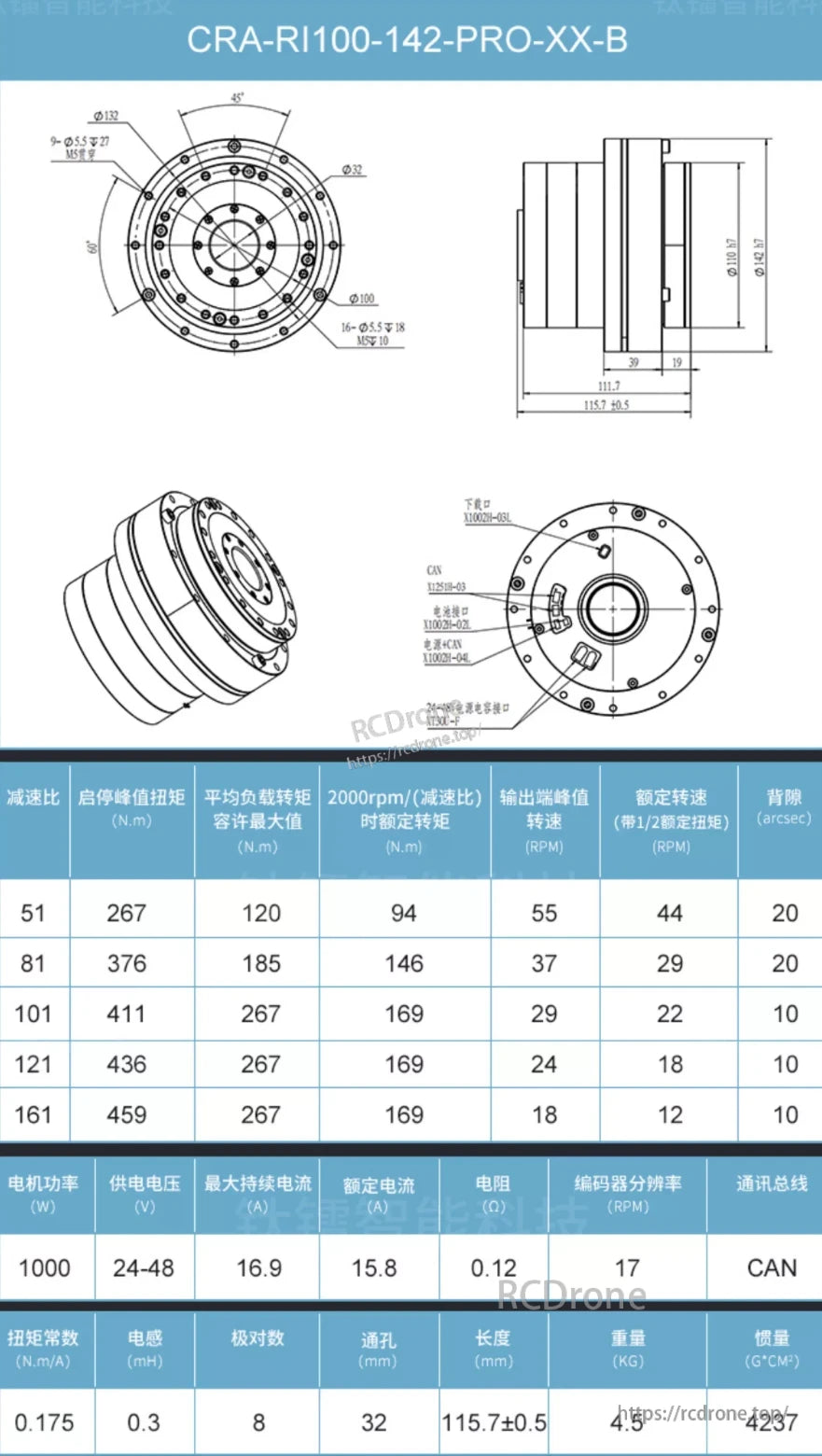
Especificações do atuador CRA-RI100-142-PRO-XX-B: motor de 1000 W, 24-48 V, corrente nominal de 15,8 A, resolução do codificador de 17 RPM, barramento CAN, peso de 4,5 kg, comprimento de 115,7 mm, múltiplas relações de transmissão com dados de torque e velocidade.
Related Collections






