








Módulo de Junta Ti5 ROBOT CRA-RI30-40-PRO Motor 36W 24-48V Encoder 16Bits Redução 51/101
Módulo de Junta Ti5 ROBOT CRA-RI30-40-PRO Motor 36W 24-48V Encoder 16Bits Redução 51/101
Ti5 ROBOT
Não foi possível carregar a disponibilidade de recolha
Visão Geral
Ti5 ROBOT CRA-RI30-40-PRO é um motor de módulo de junta leve projetado para a atuação de juntas em robótica. Os destaques visíveis do produto incluem: “Módulo de junta leve”, “Chave de avanço de hardware central”, “Leve: tamanho pequeno, desempenho poderoso” e “Alta Densidade de Torque (indicadores chave de desempenho e características leves)”.
Para orientação de configuração e suporte técnico, entre em contato https://rcdrone.top/ ou envie um e-mail para [email protected].
Principais Características
Leve
- Ultra-leve com maior usabilidade.
- Reduzir o peso em mais de 1/3.
- Reduzir significativamente o consumo de energia operacional.
Desempenho mais forte
- Padrões de desempenho de grau industrial.
- A densidade de torque é o dobro da de produtos semelhantes.
- Classe automóvel, anti-estático, anti-vibração.
Modularização
- Seis módulos estão integrados organicamente.
- Três séries podem adaptar-se de forma abrangente a clientes em diferentes cenários.
- Reduzir significativamente a dificuldade de produção; melhorar a eficiência de produção.
Composição do módulo interno (rotulado)
- Tampa traseira do motor
- Placa de controlo
- Encoder
- Carcaça do estator
- Rotor do motor
- Estator do motor
- Redutores harmónicos
- Capa Flexspline
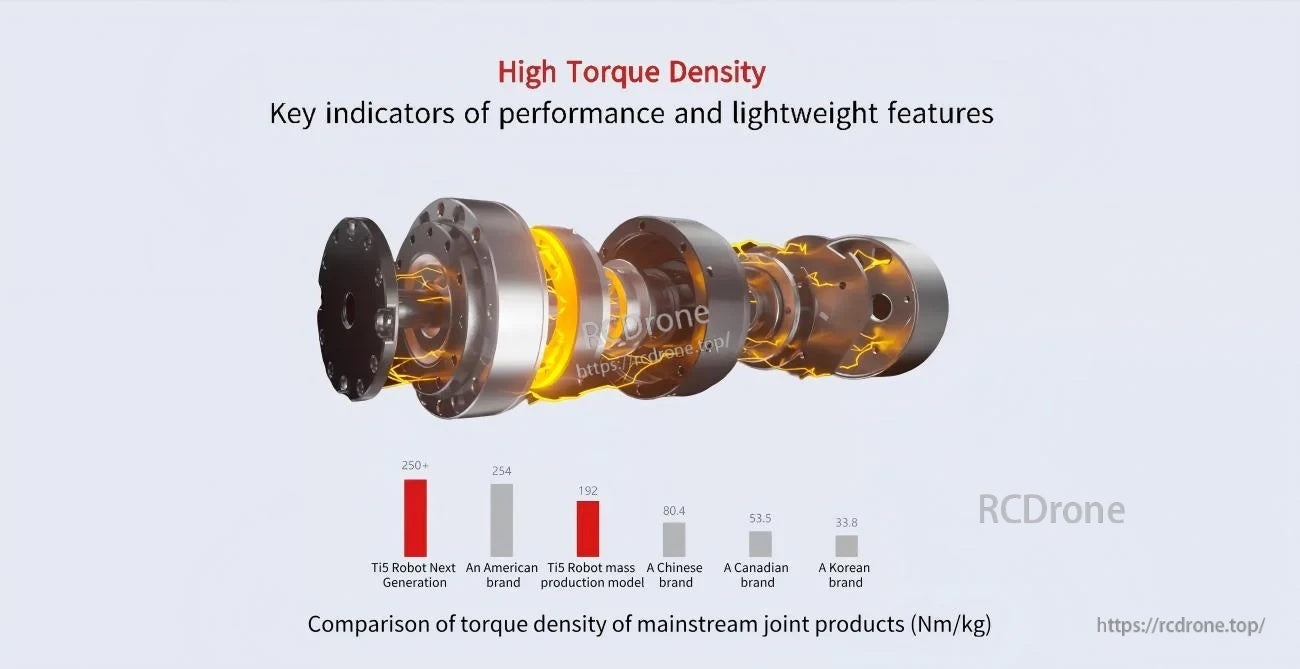
Comparação da densidade de torque (Nm/kg)
“Comparação da densidade de torque de produtos de junção mainstream (Nm/kg)” valores mostrados:
- Robô Ti5 Próxima Geração: 250+
- Uma marca americana: 254
- Modelo de produção em massa do Robô Ti5: 192
- Uma marca chinesa: 80.4
- Uma marca canadiana: 53.5
- Uma marca coreana: 33.8
Declarações de produção em massa e desenvolvimento (como mostrado)
- Vantagem de produção em massa líder da indústria.
- Todo o hardware subjacente pode ser controlado, e a taxa de localização pode atingir 100%.
- Possui uma cadeia de ferramentas de software completa para desenvolvimento de robôs, ajudando a acelerar a pesquisa e o desenvolvimento.
Aplicações
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
Especificações
| Parâmetro | Valor |
|---|---|
| Modelo do Motor | CRA-RI30-40-PRO-XX / CRA-RI30-40-PRO-XX-B |
| Relação de Redução | 51 / 101 |
| Torque de Pico de Arranque-Paragem | 3.3 / 4.8 N.m |
| Torque Máximo Médio Permitido | 2.3 / 3.3 N.m |
| 2000 Rpm/(Relação de Redução) Torque Nominal a esta velocidade | 1.8 / 2.4 N·m |
| Velocidade Rotacional Máxima de Saída | 118 / 59 RPM |
| Velocidade Nominal | 90 / 45 RPM |
| Potência do Motor | 36 W |
| Tensão de Alimentação | 24-48 V |
| Corrente Contínua Máxima | 2 A |
| Corrente Nominal | 1 A |
| Resolução do Encoder | 16 Bit |
| Folga Traseira | 40 / 40 arcsec |
| Constante de Torque | 0.024 N·m/A |
| Furo | 6 mm |
| Comprimento: Sem travão / Com travão | 60±0.5 mm / 78.6±0.5 mm |
| Peso: Sem travão / Com travão | 0.19 kg / 0.27 kg |
| Inércia: Sem travão / Com travão | 27.4 g·cm² / 45.1 g·cm² |
Manuais
Detalhes

Construído para juntas robóticas compactas, a série CRA-RI30-40-PRO visa alto desempenho em um formato leve.

Uma arquitetura modular integrada combina várias seções funcionais em um módulo pronto para juntas para simplificar as montagens.

Um layout interno fortemente integrado suporta a implementação pronta para produção e uma cadeia de ferramentas completa para desenvolvimento de robôs.

A densidade de torque é enfatizada como um indicador chave de desempenho leve para módulos de juntas.
Related Collections








