






Módulo de Motor Articulado Ti5 ROBOT CRA-RI40-52-PRO Motor 24-48V 90W Relação 51/101 Encoder 16Bits
Módulo de Motor Articulado Ti5 ROBOT CRA-RI40-52-PRO Motor 24-48V 90W Relação 51/101 Encoder 16Bits
Ti5 ROBOT
Não foi possível carregar a disponibilidade de recolha
Visão Geral
Ti5 ROBOT O motor CRA-RI40-52-PRO é um motor de módulo de junta leve para articulações robóticas. O texto em destaque inclui: “MÓDULO DE JUNTA LEVE”, “Chave de avanço do hardware central”, “Leve” e “Tamanho pequeno, desempenho poderoso”.
Principais Características
Leve / tamanho pequeno
- Design ultra-leve com maior usabilidade.
- Redução de peso em mais de 1/3.
- Reduz significativamente o consumo de energia em operação.
Desempenho
- Padrões de desempenho de grau industrial.
- A densidade de torque é o dobro da de produtos semelhantes.
- Grau automotivo, anti-estático, anti-vibração.
Modularização
- Seis módulos estão integrados organicamente.
- Três séries adaptam-se de forma abrangente a clientes em diferentes cenários.
- Reduz significativamente a dificuldade de produção; melhora a eficiência de produção.
Estrutura (rótulos de vista explodida)
- Capa traseira do motor
- Placa de controle
- Encoder
- Carcaça do estator
- Rotor do motor
- Estator do motor
- Redutores harmônicos
- Capa Flexspline
Produção em massa / declarações de plataforma
- Vantagem de produção em massa líder da indústria.
- Todo o hardware subjacente pode ser controlado, e a taxa de localização pode atingir 100%.
- Conjunto completo de ferramentas de software para desenvolvimento de robôs, ajudando a acelerar a pesquisa e desenvolvimento.
- A Plataforma de Desenvolvimento Rápido Ti5 Robot combina hardware e software, com um SDK de código aberto mencionado para disponibilidade futura.
Comparação de densidade de torque (Nm/kg)
- 250+: Ti5 Robot Próxima Geração
- 254: Uma marca americana
- 192: Modelo de produção em massa Ti5 Robot
- 80.4: Uma marca chinesa
- 53.5: Uma marca canadiana
- 33.8: Uma marca coreana
Texto da legenda: “Comparação da densidade de torque de produtos de articulação mainstream (Nm/kg)”.
Para orientação na seleção, questões de documentação ou suporte à integração, entre em contato https://rcdrone.top/ ou envie um e-mail para [email protected].
Aplicações
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
Especificações
| Parâmetro | Valor |
|---|---|
| Modelo do Motor | CRA-RI40-52-PRO-XX / CRA-RI40-52-PRO-XX-B |
| Relação de Redução | 51 / 101 |
| Torque de Pico de Arranque-Paragem | 8.3 / 11 N.m |
| Torque Médio Máximo Permitido | 5.5 / 8.9 N.m |
| 2000 Rpm/(Relação de Redução) Torque Nominal a esta velocidade | 3.5 / 5 N·m |
| Velocidade Rotacional Máxima na Saída | 118 / 59 RPM |
| Velocidade Nominal | 80 / 40 RPM |
| Potência do Motor | 90 W |
| Tensão de Alimentação | 24-48 V |
| Corrente Contínua Máxima | 3 A |
| Corrente Nominal | 2 A |
| Resolução do Encoder | 16 Bit |
| Folga Traseira | 40 / 30 arcsec |
| Constante de Torque | 0.05 N·m/A |
| Furo | 12 mm |
| Comprimento: Sem travão / Com travão | 62 ±0.5 mm / 82 ±0.5 mm |
| Peso: Sem travão / Com travão | 0.32 kg / 0.42 kg |
| Inércia: Sem travão / Com travão | 73 g·cm² / 116.2 g·cm² |
Manuais
Detalhes

Projetado para articulações robóticas compactas onde o baixo peso e a alta densidade de torque são mais importantes.

Um layout interno modular combina motor, reducidor, placa de controle e encoder em um único módulo de articulação integrado.

Construído sobre uma plataforma de produção escalável com uma cadeia de ferramentas de desenvolvimento destinada a acelerar a integração de robôs.

A decomposição a nível de componente ajuda a confirmar o que está incluído dentro do módulo de articulação para planejamento de design e manutenção.
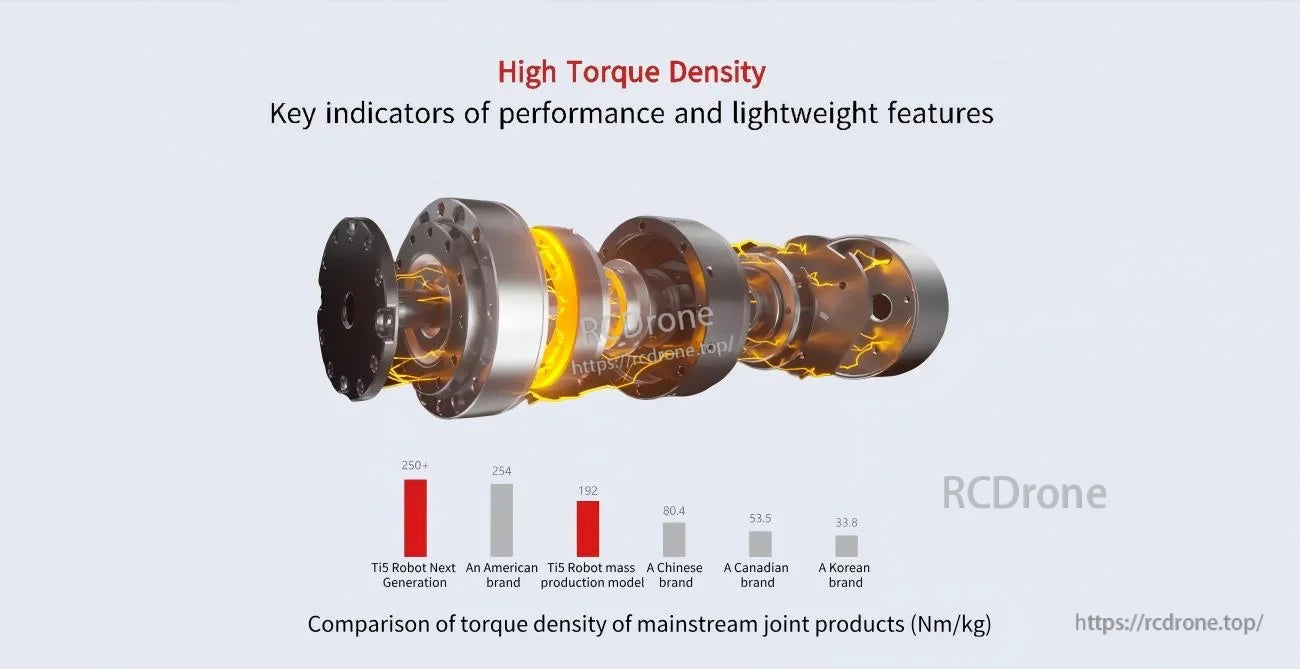
A comparação da densidade de torque (Nm/kg) fornece um contexto rápido em relação a outros produtos de articulação convencionais.
Related Collections






