



Robô Ti5 CRA-RI40-52-PRO-XX Atuador de junta de robô integrado, acionamento harmônico, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, eixo oco, codificador simples/duplo (opção de freio)
Robô Ti5 CRA-RI40-52-PRO-XX Atuador de junta de robô integrado, acionamento harmônico, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, eixo oco, codificador simples/duplo (opção de freio)
Ti5 Robot
Não foi possível carregar a disponibilidade de recolha
Visão geral
O robô Ti5 CRA-RI40-52-PRO-XX é um módulo articulado compacto e integrado que combina um motor de torque sem estrutura, um redutor harmônico de precisão, um servo driver e um codificador magnético em uma única unidade IP65. Com alimentação de 24–48 V CC e potência nominal de 90 W, ele fornece torque nominal de 7 N·m e velocidade de saída nominal de 80 rpm para robôs humanoides, exoesqueletos, braços colaborativos, gimbals, AGVs e outras aplicações de ponta. Um furo central de passagem permite o roteamento de cabos; configurações de codificador simples ou duplo e uma opção de freio de retenção estão disponíveis. A comunicação é CAN por padrão, com EtherCAT selecionável.
Principais características
-
Motor integrado + acionamento + redutor harmônico + encoder (magnético)
-
Torque nominal 7 N·m; velocidade de saída nominal 80 rpm; potência de 90 W
-
Duas taxas de redução: 51:1 ou 101:1
-
Alta precisão: codificador de 17 bits, folga típica de 40 segundos de arco (51)/30 segundos de arco (101)
-
Baixo ruído, baixo desgaste; design de alta densidade de torque
-
Proteção IP65; baixa temperatura opcional &personalização à prova d'água
-
Barramento de comunicação: CAN (padrão) ou EtherCAT (opcional)
-
Opções de codificador simples/duplo; versões com freio ou sem freio
-
Furo passante para fiação: 12 mm (padrão)/11 mm (freio)
-
Aplicações típicas: humanoides, articulações de robôs colaborativos, exoesqueletos, pan-tilts, equipamentos industriais, robôs de inspeção de energia, sistemas marítimos/veiculares
Desempenho por relação de transmissão
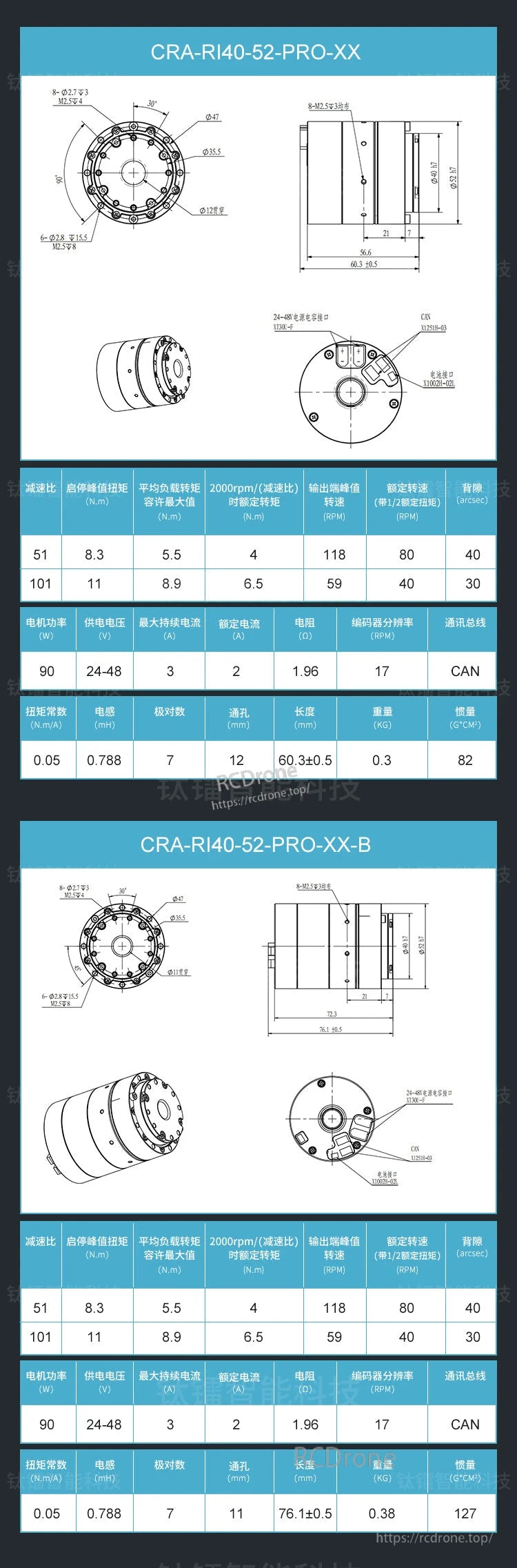
| Item | 51:1 | 101:1 |
|---|---|---|
| Pico de torque de partida/parada (N·m) | 8.3 | 11 |
| Torque de carga médio máximo permitido (N·m) | 5.5 | 8.9 |
| Torque nominal a 2000 rpm/(relação) (N·m) | 4 | 6,5 |
| Velocidade de pico de saída (rpm) | 118 | 59 |
| Velocidade nominal a ½ torque nominal (rpm) | 80 | 80 |
| Folga (arcsec) | 40 | 30 |
Especificações elétricas
-
Tensão de alimentação: 24–48 V CC
-
Corrente nominal/contínua: 2 A (máx. contínuo 3 A)
-
Resistência de fase: 1,96 Ω
-
Indutância: 0,788 mH
-
Constante de torque: 0,05 N·m/A
-
Pares de pólos: 7
-
Resolução do codificador: 17 bits (magnético)
Mecânico &e interface
-
Grau de proteção: IP65
-
Velocidade de saída nominal: 80 rpm
-
Comunicação: PODE (padrão)/EtherCAT (opção)
-
Furo de passagem (para fiação): Ø12 mm (padrão)/Ø11 mm (com freio)
-
Comprimento & inércia (sem freio): 60,3 ± 0,5 mm, 82 g·cm²
-
Comprimento & inércia (versão de freio -B): 76,1 ± 0,5 mm, 127 g·cm²
-
Massa: 0.3 kg
-
Comprimento do cabo: 5 metros
-
Ambiente operacional (típico): até 60 °C
-
Materiais: componentes de alumínio com redutor harmônico de precisão
Variantes & Opções
-
Comunicação: CAN ou EtherCAT
-
Codificador: codificador magnético simples ou duplo
-
Freio: sem freio (padrão) ou -B versão com freio de retenção
-
Ambiente: pacote personalizável de impermeabilização e baixa temperatura
-
Notação de série: CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) (indica redutor, contagem do sensor de torque/codificador, relação, proteção, etc.)
Aplicações típicas
Articulações humanoides (ombro/cotovelo/quadril/joelho), braços robóticos colaborativos, atuadores de exoesqueleto, cardãs de panorâmica e inclinação/visão, eixos de automação industrial, UGVs/AGVs de inspeção de energia e mecanismos auxiliares marítimos/veiculares.
Notas
-
Instale usando os padrões de parafusos e tolerâncias especificados mostrados nos desenhos.
-
Confirme a relação, a configuração do codificador, o barramento de comunicação e os requisitos de freio antes de fazer o pedido.
-
Devido à natureza industrial deste produto, as unidades instaladas/usadas normalmente não podem ser devolvidas; consulte os documentos de dimensionamento com a equipe técnica antes da compra.
Detalhes
O atuador articulado robótico Ti5 CRA-R140-52-PRO-XX e -B oferece potência de 90 W, alimentação de 24–48 V, corrente máxima de 3 A, resolução de encoder de 17 RPM, torque, velocidade e comunicação CAN.

O atuador articulado do robô Ti5 modelo CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) inclui freio, sensor de torque, codificadores duplos, classificação à prova d'água, taxa de redução, diâmetro externo e tipo de motor.

Atuadores articulados da série PRO para robôs humanoides, exoesqueletos, robôs colaborativos, automóveis e AGVs. Características: alta robustez, longa vida útil, alta densidade de torque, baixo torque de engrenagem, à prova d'água, à prova de poeira, à prova de explosão, baixo ruído, alta precisão, design de eixo oco.
Related Collections



