










Ti5 ROBOT CRA-RI60-70-PRO Motor 300W 24-48V Módulo de Junta (51/81/101/121) Codificador 16Bits
Ti5 ROBOT CRA-RI60-70-PRO Motor 300W 24-48V Módulo de Junta (51/81/101/121) Codificador 16Bits
Ti5 ROBOT
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O Motor Ti5 ROBOT CRA-RI60-70-PRO é um módulo de junta leve, projetado para juntas robóticas compactas onde são necessários alta densidade de torque e feedback preciso. Integra componentes chave da junta, como o encoder, placa de controle, estator/rotor do motor e redutores harmónicos numa estrutura modular.
Principais Características
- Módulo de junta leve e compacto: Design de pequeno tamanho para juntas robóticas com espaço limitado.
- Conceito ultra-leve: Redução de peso declarada em mais de 1/3, ajudando a reduzir o consumo de energia operacional.
- Desempenho mais forte (declarado): Padrões de desempenho de grau industrial; a densidade de torque declarada é o dobro da de produtos semelhantes.
- Modularização: Seis módulos são descritos como interoperáveis; três séries são descritas como adaptáveis a diferentes cenários, apoiando a melhoria da eficiência de produção.
- Estrutura de junta integrada: Tampa traseira do motor, placa de controle, codificador, carcaça do estator, rotor do motor, estator do motor, redutores harmônicos e tampa flexspline.
- Vantagem de produção em massa (declarada): Hardware subjacente descrito como controlável; uma cadeia de ferramentas de software completa é descrita para desenvolvimento de robôs e aceleração de P &D.
- Gráfico de comparação de densidade de torque: Título do gráfico mostrado como “Comparação da densidade de torque de produtos de junta convencionais (Nm/kg)” com valores mostrados: 250+ (Ti5 Robot Próxima Geração), 254 (Uma marca americana), 192 (Modelo de produção em massa do Ti5 Robot), 80.4 (Uma marca chinesa), 53.5 (Uma marca canadiana), 33.8 (Uma marca sul-coreana).
Para suporte de seleção e questões de integração, contacte [email protected] or visite https://rcdrone.top/ .
Aplicações
- Robôs Humanoides
- Braços Robóticos
- Exoesqueletos
- Robôs Quadrúpedes
- Veículos AGV
- Robôs ARU
Especificações
| Parâmetro | Valor |
|---|---|
| Modelo do Motor | CRA-RI60-70-PRO-XX / CRA-RI60-70-PRO-XX-B |
| Relação de Redução | 51 / 81 / 101 / 121 |
| Torque de Pico de Arranque-Paragem | 42 / 53 / 66 / 66 N.m |
| Torque Máximo Médio Permitido | 32 / 33 / 49 / 49 N.m |
| 2000 Rpm/(Relação de Redução) Torque Nominal a esta velocidade | 19.8 / 27.5 / 30 / 30 N.m |
| Saída Final Velocidade Rotacional de Pico | 82 / 51 / 41 / 32 RPM |
| Velocidade Nominal | 68 / 43 / 34 / 24 RPM |
| Potência do Motor | 300 W |
| Tensão de Alimentação | 24-48 V |
| Corrente Contínua Máxima | 6.7 A |
| Corrente Nominal | 5 A |
| Resolução do Encoder | 16Bit |
| Desvio Traseiro | 20 / 20 / 10 / 10 arcsec |
| Constante de Torque | 0.096 N.m/A |
| Furo | 18 mm |
| Comprimento: Sem travão / Com travão | 72.5±0.5 mm / 93±0.5 mm |
| Peso: Sem travão / Com travão | 0.73 kg / 0.88 kg |
| Inércia: Sem travão / Com travão | 394,8 g·cm² / 492 g·cm² |
Manuais
Detalhes

Uma plataforma de módulo de junta compacta e leve para juntas robóticas com espaço limitado que ainda necessitam de alta densidade de torque e feedback preciso.

O design integrado da junta combina o motor, encoder e eletrónica de controlo numa estrutura modular para simplificar a integração da junta.


Os componentes principais da junta—placa de controlo, encoder, rotor/estator do motor e redutor harmónico—estão integrados numa única montagem pronta para a junta.
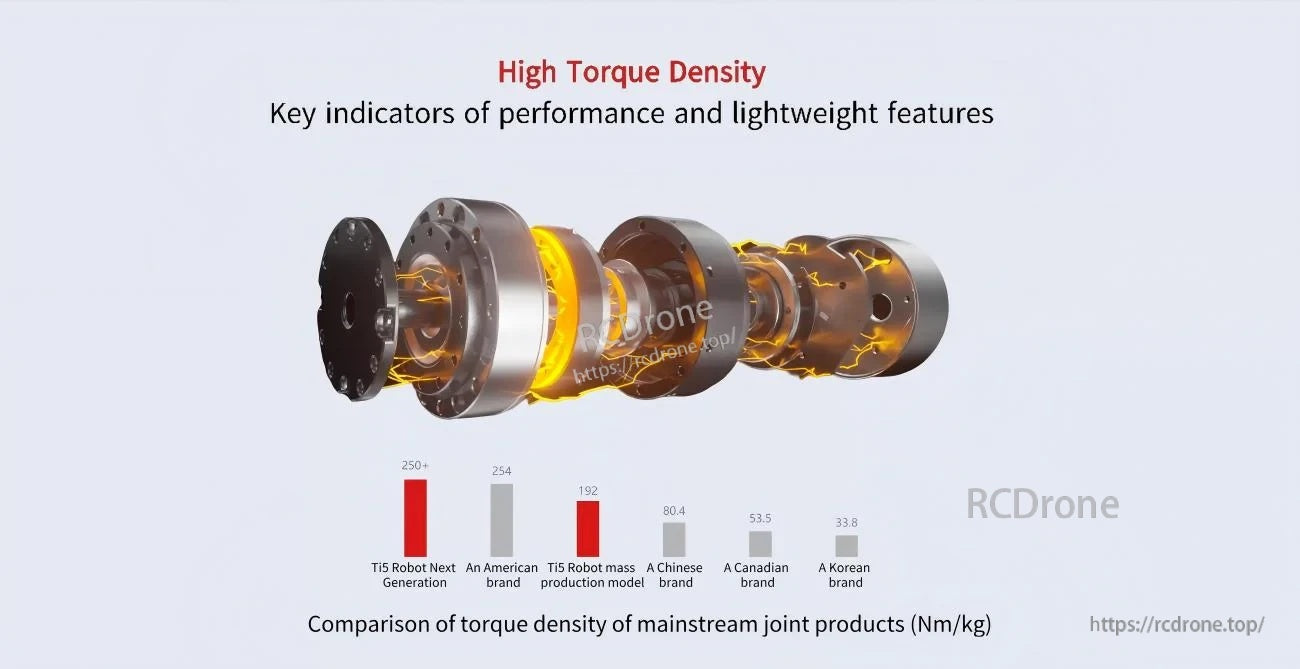
A comparação da densidade de torque (Nm/kg) ajuda a avaliar o desempenho do módulo de junta entre os modelos de Robot Ti5 e outros produtos convencionais.
Related Collections










