


Atuador de junta de eixo oco do robô Ti5 CRA-RI60-70-PRO-S-XX, 24–48 V CAN/EtherCAT, IP65, 51–102:1, pico de até 66 N·m, opção de freio -B
Atuador de junta de eixo oco do robô Ti5 CRA-RI60-70-PRO-S-XX, 24–48 V CAN/EtherCAT, IP65, 51–102:1, pico de até 66 N·m, opção de freio -B
Ti5 Robot
Não foi possível carregar a disponibilidade de recolha
Visão geral
O Robô Ti5 O CRA-RI60-70-PRO-S-XX é uma junta robótica integrada compacta, de eixo oco, para braços, humanoides, exoesqueletos, mecanismos de UAV e plataformas móveis. Ele combina um motor de torque BLDC sem moldura, redutor de precisão, encoder magnético absoluto (simples ou duplo) e interface de acionamento em um módulo IP65. A arquitetura PRO-S prioriza a miniaturização e a resposta dinâmica rápida, mantendo uma alta relação carga/peso. A comunicação é CAN por padrão, com EtherCAT disponível. Uma versão de freio de fábrica "-B" adiciona um freio de retenção para segurança ao desligar. (Todos os valores abaixo são obtidos das folhas de dados e capturas de tela do produto fornecidas.)
Principais características
-
Módulo de junta compacta de eixo oco (série Ø60/Ø70) para fácil roteamento de cabos e sistemas pneumáticos
-
Relações 51, 81, 101, 102 com baixa folga (até 10 segundos de arco dependendo da relação)
-
Torque máximo de até 66 N·m; torque nominal de até 30 N·m (condição de relação de 2000 rpm)
-
Resposta rápida; design de alta relação carga/peso (≈0,69 kg padrão/≈0,84 kg com freio)
-
Invólucro IP65 à prova de poeira/água, estrutura de alumínio
-
Codificador magnético absoluto de 17 bits; opções de codificador simples ou duplo
-
Alimentação 24–48 V DC, barramento CAN (EtherCAT opcional); eixo passante Ø18 mm
-
A variante “-B” adiciona freio de desligamento; corpo mais longo e maior inércia para retenção
Especificações
Elétrica comum & mecânico
-
Potência do motor: 300 W
-
Tensão de alimentação: 24–48 V DC
-
Corrente contínua máxima: 6,7 A; Corrente nominal: 5 A; Resistência de fase: 0,33 Ω
-
Constante de torque: 0,096 N·m/A; Indutância: 0,074 mH; Pares de pólos: 10
-
Codificador: magnético absoluto, 17 bits; selecionável simples/duplo
-
Comunicação: CAN (EtherCAT opcional)
-
Furo passante: 18 mm; Proteção: IP65
Por relação de transmissão (CRA-RI60-70-PRO-S-XX)
| Razão | Torque de pico de partida/parada (N·m) | Torque máximo contínuo/médio (N·m) | Torque nominal a 2000 rpm/relação (N·m) | Velocidade de pico de saída (rpm) | Velocidade nominal a ½ torque nominal (rpm) | Folga (arcsec) |
|---|---|---|---|---|---|---|
| 51 | 42 | 32 | 19,8 | 82 | 68 | 20 |
| 81 | 53 | 33 | 27,5 | 51 | 43 | 20 |
| 101 | 66 | 49 | 30 | 41 | 34 | 10 |
| 102 | 66 | 49 | 30 | 32 | 24 | 10 |
Fator de forma & inércia
-
Padrão (-XX): comprimento 70,7 ± 0,5 mm; peso 0,69 kg; inércia do rotor 382 g·cm²
-
Com freio (-XX-B): comprimento 89,7 ± 0,5 mm; peso 0.84 kg; inércia do rotor 538 g·cm²
Outros dados de catálogo
-
Valor de referência de torque nominal: 30 N·m
-
Velocidade nominal típica: 30 rpm (dependente da relação)
-
Temperatura de operação: até 60 °C
-
Montagem: montagem por parafuso; interface de eixo chaveada
Observações: encoder simples/duplo, opção de freio e tipo de barramento podem ser selecionados no pedido; EtherCAT mostrado como "Ether-cat" nas capturas de tela. Todas as dimensões e classificações acima foram retiradas diretamente das folhas fornecidas para CRA-RI60-70-PRO-S-XX e CRA-RI60-70-PRO-S-XX-B.
Aplicações
-
Braços robóticos industriais e colaborativos de 6 eixos
-
Articulações humanoides (ombro, cotovelo, quadril, joelho)
-
Exoesqueletos e dispositivos de reabilitação
-
Gimbals/mecanismos de UAV e manipuladores de luz
-
Mecanismos AGV/AMR, pequenas máquinas-ferramentas e automação de laboratório
Detalhes
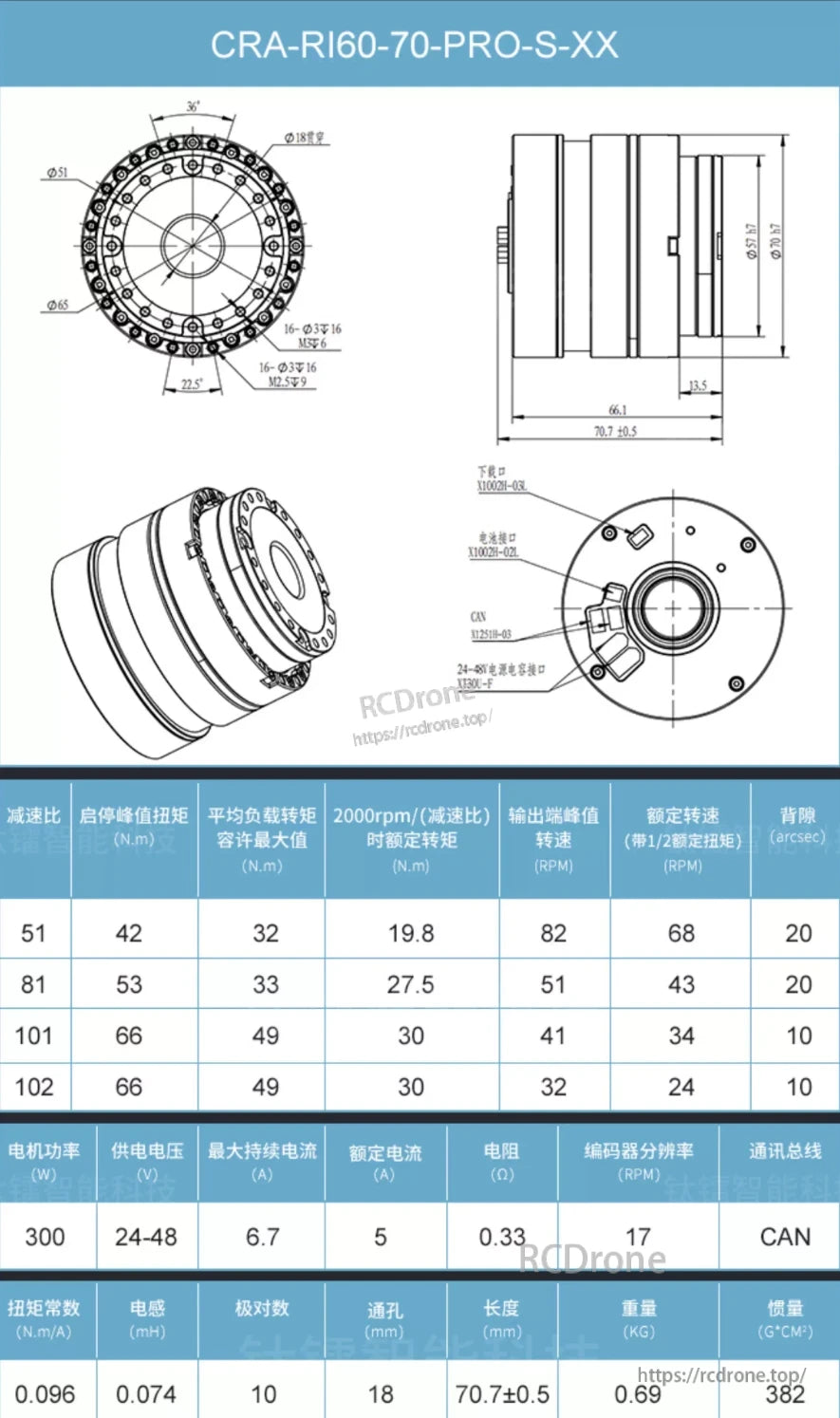
Especificações do atuador CRA-RI60-70-PRO-S-XX: motor de 300 W, 24-48 V, corrente nominal de 5 A, resolução do encoder de 17 RPM, comunicação CAN, peso de 0,69 kg, inércia de 382 G·CM², múltiplas relações de transmissão com dados de torque e velocidade.

Especificações do atuador CRA-RI60-70-PRO-S-XX-B: motor de 300 W, 24-48 V, corrente nominal de 5 A, resistência de 0,33 Ω, resolução do encoder de 17 RPM, barramento CAN, peso de 0,84 kg, inércia de 538 G·cm². Dimensões: comprimento de 89,7 ± 0,5 mm, Ø 70,37 mm.
Related Collections


