Módulo de junta de robô integrado Ti5 Robot CRA-RI60-80-PRO-XX - unidade harmônica, 24–48 V, CAN/EtherCAT, codificador de 17 bits
Módulo de junta de robô integrado Ti5 Robot CRA-RI60-80-PRO-XX - unidade harmônica, 24–48 V, CAN/EtherCAT, codificador de 17 bits
Ti5 Robot
Não foi possível carregar a disponibilidade de recolha
Visão geral
O robô Ti5 CRA-RI60-80-PRO-XX é uma junta integrada compacta de eixo oco para humanoides, cobots e manipuladores móveis. Ela combina uma redutor harmônico ultrafino, motor de torque sem moldura, Servo drive FOC, e codificador magnético absoluto em um módulo, entregando saída com folga quase zero, baixo ruído e alta densidade de torque. A junta suporta PODE ou EtherCAT, codificadores simples ou duplos, e um freio de retenção opcional. Estão disponíveis dois comprimentos: o PRO-XX padrão e o estendido PRO-XX-B (corpo mais longo, maior inércia do rotor, furo passante maior).
Principais características
-
Junta tudo-em-um: redutor harmônico + motor de torque + driver FOC + encoder absoluto.
-
Reação quase nula na saída; controle suave de baixa velocidade e baixo ruído acústico.
-
Projeto de eixo oco para passagem de cabos/vias aéreas; múltiplas taxas de redução.
-
Codificador absoluto, 17 bits, memória de posição de perda de potência; opcional codificador duplo versão.
-
Comunicação: PODE ou EtherCAT selecionável.
-
Poder: 24–48 V, driver integrado, classe de potência do motor de 300 W.
-
Freio de retenção opcional; IP/à prova d'água & baixa temperatura personalização disponível.
-
Pronto para aplicação para gimbals, humanoides, cobots, equipamentos industriais, robôs de patrulha e dispositivos marítimos.
Especificações
Elétrica & Controle (compartilhado por PRO-XX/PRO-XX-B)
-
Potência nominal do motor: 300 W
-
Tensão de alimentação: 24–48 V CC
-
Corrente contínua máxima: 6,7 A; corrente nominal: 5 A
-
Resistência de fase: 0,33 Ω
-
Constante de torque: 0,096 N·m/A
-
Indutância: 0,074 mH
-
Pares de pólos: 10
-
Codificador: absoluto de 17 bits; opções de codificador simples/duplo
-
Ônibus: PODE (padrão) ou EtherCAT (opção)
Mecânico (eixo oco)
-
Furo passante (PRO-XX): Ø15 mm
-
Furo passante (PRO-XX-B): Ø18 mm
-
Comprimento (PRO-XX): 70,4 ± 0,5 mm; peso ≈1,01 kg; inércia do rotor ≈441 g·cm²
-
Comprimento (PRO-XX-B): 92,9 ± 0,5 mm; peso ≈1,17 kg; inércia do rotor ≈595 g·cm²
-
Montagem: círculo de parafuso frontal (saída oca); redutor harmônico integrado
-
Opções: freio de retenção; codificador simples/duplo; CAN/EtherCAT; impermeabilização & pacote de baixa temperatura
Opções de redutor & desempenho (lado de saída)
Reação negativa: tão baixa quanto 10–20 segundos de arco dependendo da proporção.
| Taxa de redução | Pico de torque de partida/parada (N·m) | Torque de carga médio máximo (N·m) | Torque nominal a 2000 rpm/relação (N·m) | Velocidade de pico (rpm) | Velocidade nominal a ½ torque nominal (rpm) | Folga (arcsec) |
|---|---|---|---|---|---|---|
| 51:1 | 42 | 32 | 19,8 | 82 | 68 | 20 |
| 81:1 | 53 | 33 | 27,5 | 51 | 43 | 20 |
| 101:1 | 66 | 49 | 30 | 41 | 34 | 10 |
| 121:1 | 66 | 49 | 30 | 32 | 24 | 10 |
Notas:
• Os dados acima são lidos das fichas técnicas do produto CRA-RI60-80-PRO-XX e PRO-XX-B.
• O PRO-XX-B compartilha a mesma tabela de torque/velocidade; ele fornece um furo passante maior e maior inércia com o corpo mais longo.
Aplicações
-
Humanoide &robôs de serviço: articulações do ombro, cotovelo, quadril, joelho e tornozelo com alta densidade de torque.
-
Braços robóticos colaborativos: eixos precisos com pouca folga para controle suave da força.
-
Gimbals &unidades de pan-tilt: rastreamento silencioso, estável e de baixa velocidade com memória de posição absoluta.
-
Equipamentos industriais & manipuladores AGV/AMR: atuação integrada compacta para espaços apertados.
-
Robôs de patrulha e inspeção de energia; dispositivos marítimos/de bordo (com opção à prova d'água).
Detalhes
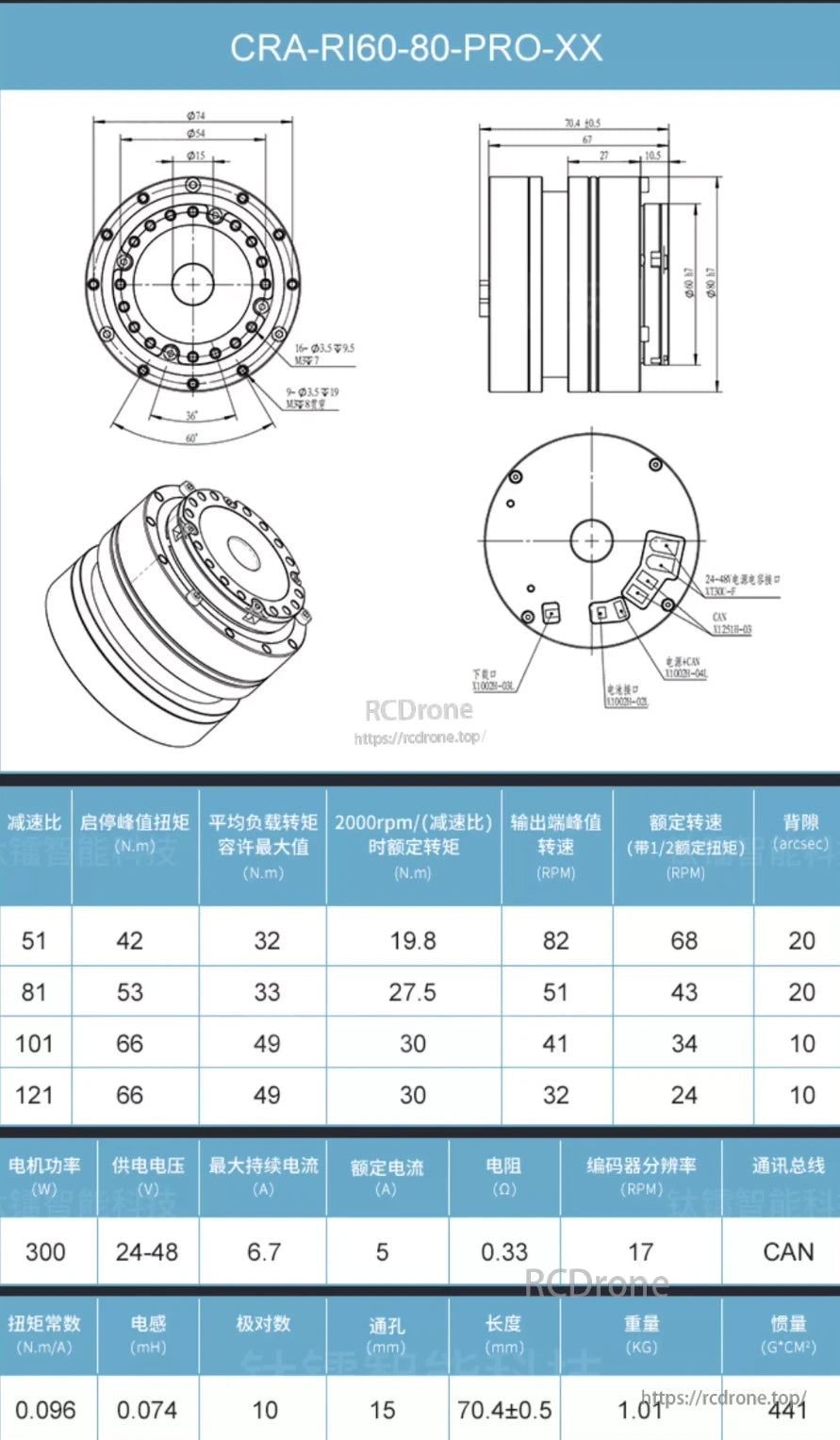
Especificações do módulo de articulação do robô CRA-RI60-80-PRO-XX: motor de 300 W, entrada de 24-48 V, barramento CAN, codificador CPR 17, comprimento de 70,4 mm, peso de 1,01 kg, múltiplas relações de transmissão com dados de torque e velocidade fornecidos.
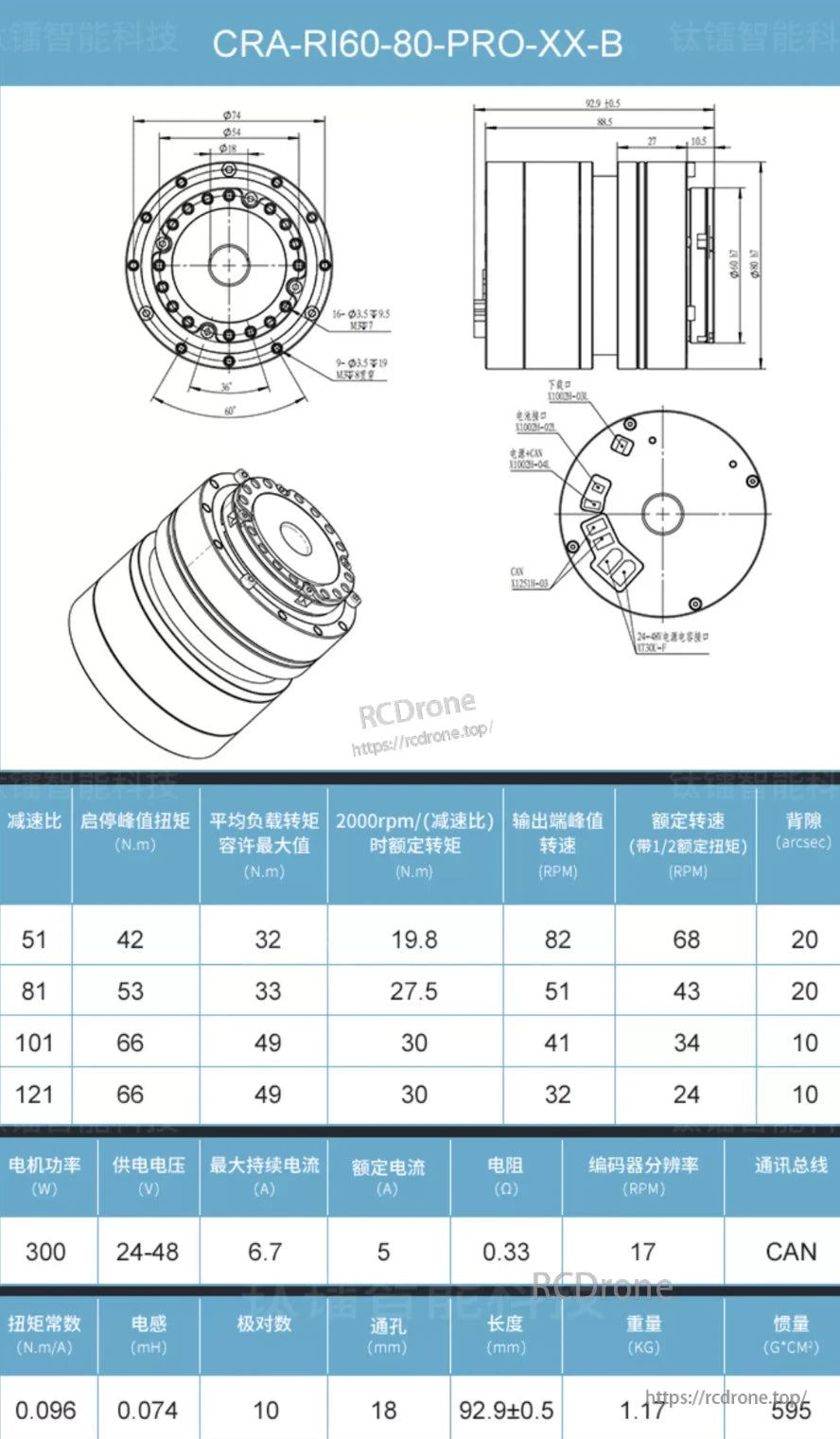
Módulo robótico CRA-RI60-80-PRO-XX-B com motor de 300 W, alimentação de 24-48 V, comunicação CAN, resolução de encoder de 17 RPM e múltiplas relações de transmissão. As principais especificações incluem torque, velocidade, corrente e dimensões.
Related Collections