Junta servo harmônica do robô Ti5 CRA-RI70-90-PRO-XX, 500 W, 24–48 V, 17 bits, CAN/EtherCAT, 51–121:1, IP65 (opção de freio)
Junta servo harmônica do robô Ti5 CRA-RI70-90-PRO-XX, 500 W, 24–48 V, 17 bits, CAN/EtherCAT, 51–121:1, IP65 (opção de freio)
Ti5 Robot
Não foi possível carregar a disponibilidade de recolha
Visão geral
O robô Ti5 CRA-RI70-90-PRO-XX é um módulo robótico de junta integrado que combina um redutor harmônico ultrafino, um motor de torque sem escovas, um servoacionamento FOC e um codificador absoluto em um design compacto de eixo oco. Com potência nominal de 500 W, fornecer 24–48 V, e taxas de redução 51/81/101/121:1, ele fornece alto torque com folga quase zero e posicionamento preciso para humanoides, cobots, gimbals, plataformas móveis e exoesqueletos. Um codificador absoluto de 17 bits garante o controle preciso do servo, e a comunicação CAN ou EtherCAT simplifica a integração do sistema. O módulo é IP65 selado e disponível com ou sem freio (variante -B).
Principais características
-
Servo-junta harmônica integrada: redutor + motor de torque BLDC + encoder absoluto de 17 bits + controlador FOC.
-
Alto torque & baixa folga: até Torque nominal de 50 N·m (dependente da razão) com ≤20/10 arco-segundo retaliação.
-
Múltiplas proporções: 51/81/101/121:1 para equilibrar velocidade e torque.
-
Ampla oferta & potência: 24–48 V, 500 W, projetado para robôs de 24/36/48 V.
-
Eixo oco Ø14,5 mm para roteamento de cabos/linhas aéreas; 10 pares de pólos motor.
-
Comunicações: PODE ou EtherCAT; opções de codificador simples ou duplo.
-
Proteção: IP65 vedação ambiental.
-
Opção de freio: CRA-RI70-90-PRO-XX-B inclui freio de retenção para desligamento seguro.
Especificações
Família modelo: CRA-RI70-90-PRO-XX (padrão)/CRA-RI70-90-PRO-XX-B (com freio)
| Item | Valor |
|---|---|
| Taxas de redução | 51/81/101/121 : 1 |
| Torque nominal a 2000 rpm/relação | 32/42/50/50 N·m |
| Pico de torque de inicialização | 63/91/102/108 N·m |
| Torque de carga máximo permitido (média) | 42/58/61/61 N·m | &
| Velocidade nominal (½ torque nominal) | 61/38/30/25 rpm |
| Velocidade de pico de saída | 77/48/40/30 rpm |
| Retaliação | 20 segundos de arco (51,81); 10 segundos de arco (101,121) |
| Potência do motor | 500 W |
| Tensão de alimentação | 24–48 V CC |
| Corrente nominal/máxima contínua | 6,1 A/8,4 A |
| Resistência de fase/indutância | 0,38 Ω/0,33 mH |
| Constante de torque | 0,118 N·m/A |
| Pares de pólos do motor | 10 |
| Codificador | absoluto de 17 bits (codificador simples ou duplo disponível) |
| Barramento de comunicação | PODE (EtherCAT disponível por opção) |
| Furo de eixo oco | Ø14,5 mm |
| Comprimento do módulo | 71,9 ± 0,5 mm (padrão)/97,4 ± 0,5 mm (-B) |
| Massa | 1,3 kg (padrão)/1,6 kg (-B) |
| Inércia do rotor (ref.) | 594 g·cm² (padrão)/682 g·cm² (-B) |
| Proteção de entrada | IP65 |
| Montagem | Montagem de flange com furos roscados |
Notas
• Os valores de desempenho variam de acordo com a proporção selecionada (51/81/101/121).
• “-B” denota a fábrica freio opção.
• Codificador simples/duplo e CAN/EtherCAT são opções selecionáveis.
Aplicações
-
Robôs humanoides e de serviço: articulações do quadril, joelho, ombro e cotovelo que exigem módulos compactos de alto torque.
-
Braços colaborativos/manipuladores: juntas precisas de baixa folga para cobots de 6/7 eixos.
-
Gimbals &unidades de pan-tilt: posicionamento suave e de alta precisão com roteamento de eixo oco.
-
Robôs móveis &e inspeção: acionamento de rodas/suspensão e mastros de sensores com freio de retenção de posição.
-
Exoesqueletos &dispositivos de reabilitação: juntas leves e de alto torque.
-
Industrial/elétrico &equipamentos marítimos: Atuação conjunta IP65 em ambientes agressivos.
Detalhes
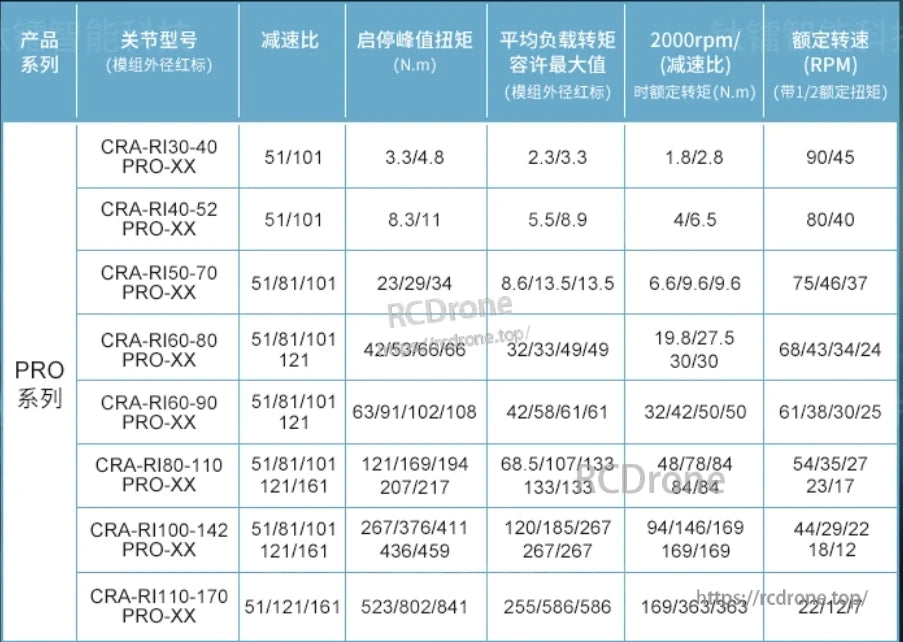
As especificações da série Ti5 Robot CRA Servo Joint PRO incluem números de modelo, relações de transmissão, torque de pico, torque de carga, torque nominal a 2000 rpm e velocidades nominais em várias configurações.
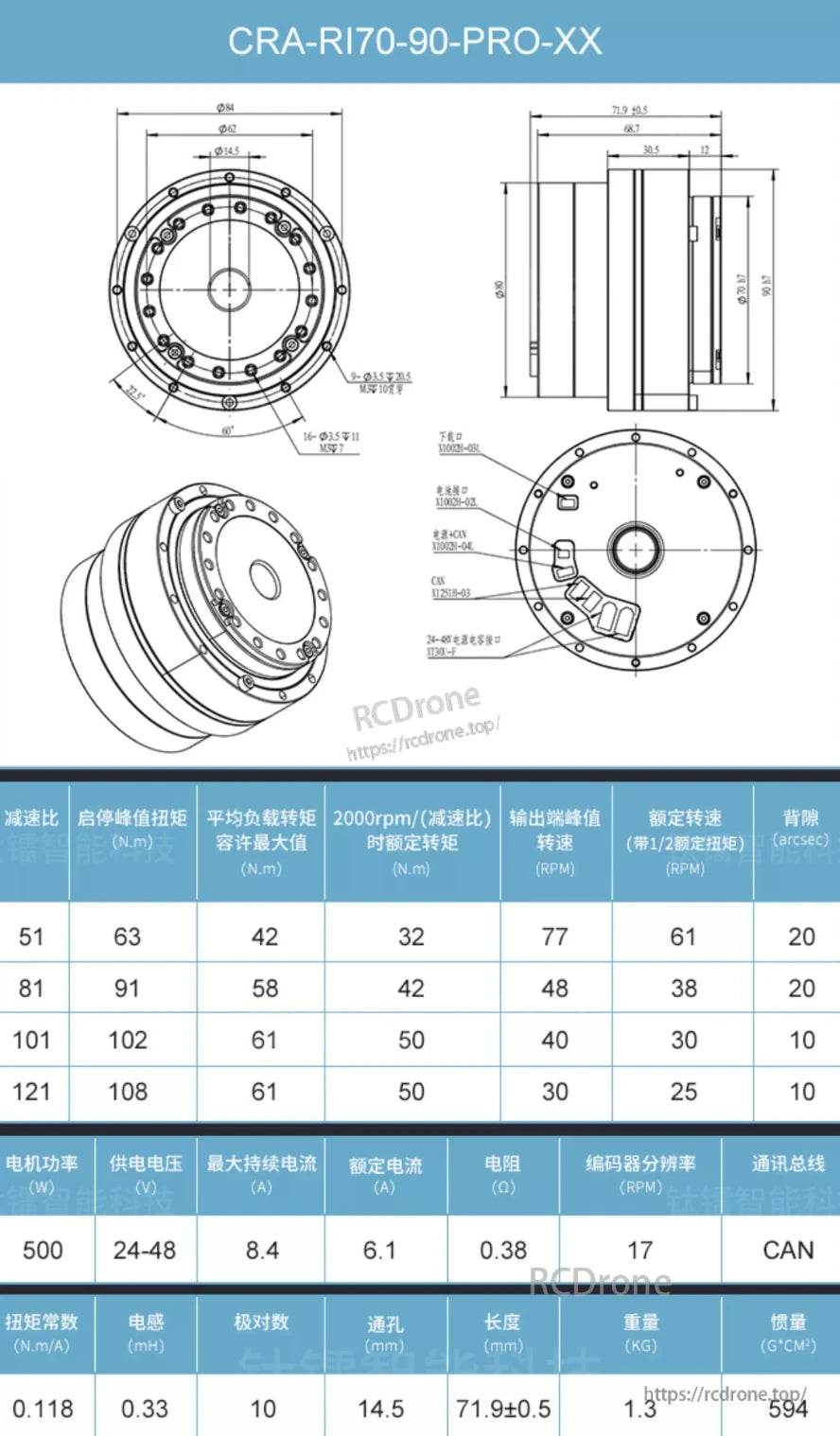
Especificações da junta servo CRA-RI70-90-PRO-XX: motor de 500 W, 24-48 V, barramento CAN, resolução do encoder de 17 RPM, peso de 1,3 kg, múltiplas relações de engrenagem, torque máximo de até 108 N.m, 594 g·cm² de inércia.
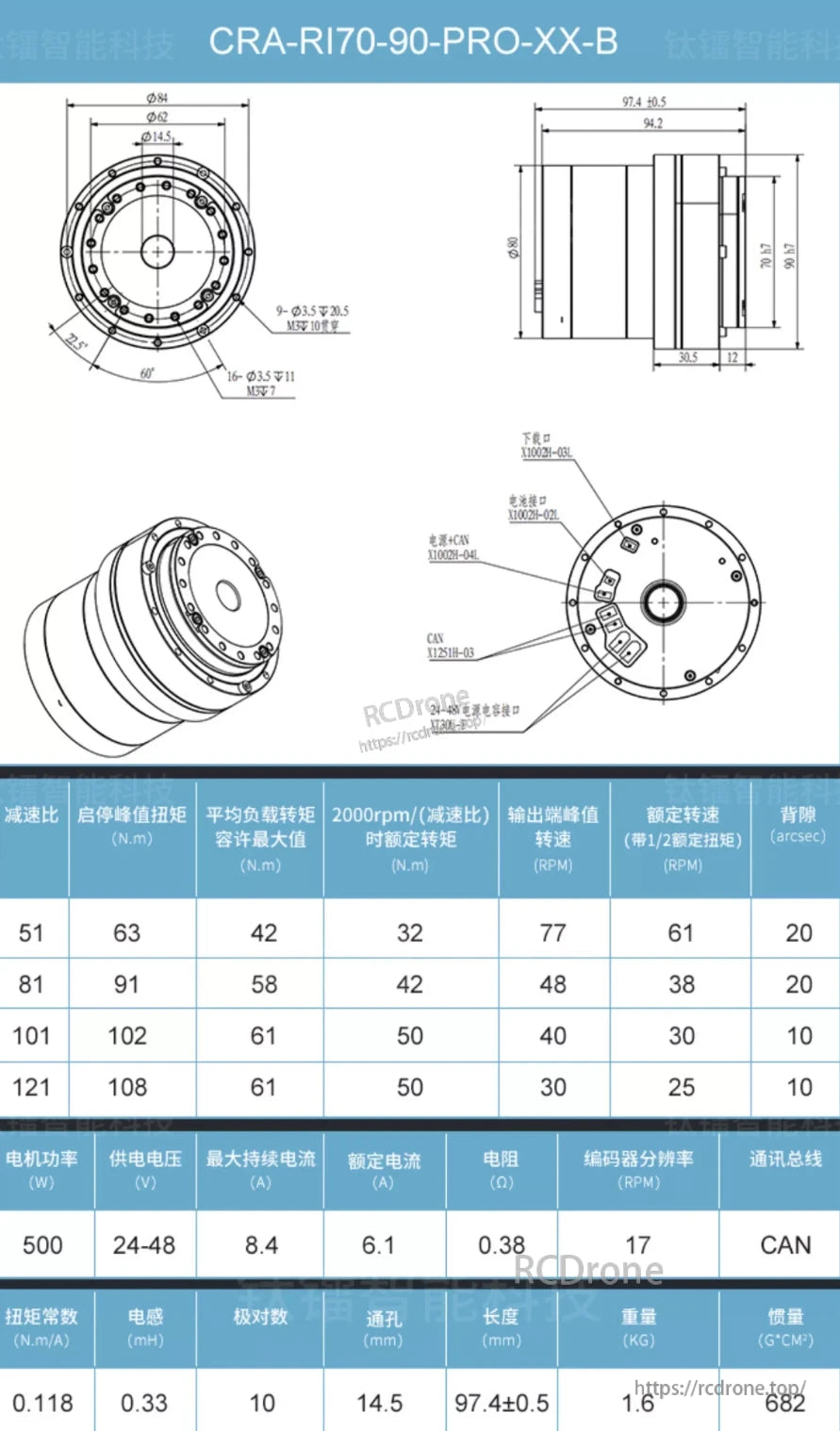
Especificações da junta servo CRA-R170-90-PRO-XX-B: motor de 500 W, 24-48 V, barramento CAN, resolução de encoder de 17 RPM, peso de 1,6 kg, múltiplas relações de transmissão com dados de torque e velocidade fornecidos.
Related Collections