








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – Acelerómetro, Giroscópio e Inclinómetro de 6 Eixos, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – Acelerómetro, Giroscópio e Inclinómetro de 6 Eixos, ROS/Matlab
WitMotion
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O WitMotion HWT601-AGV-485 é um sensor de atitude/direção de 6 eixos projetado para robôs AGV, drones e plataformas autónomas. Combina aceleração de 3 eixos + velocidade angular de 3 eixos e fornece ângulo de 3 eixos &e quaternion através de RS485 (Modbus) a até 200 Hz. O módulo apresenta filtragem dinâmica de Kalman, calibração de prato giratório de alta precisão, aquisição de viés automática/manual, energia de backup para salvar a direção em caso de falta de energia, e uma carcaça à prova d'água/dustproof IP67. Também suporta cascateamento em múltiplos níveis (até 32 unidades) para medição de atitude sincronizada.
Principais Características
-
Ângulo de alta precisão: precisão XY 0.1°; precisão Z 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Desvio do giroscópio estável: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
Entrada ampla 9–36 V, corrente de operação ≈ 8 mA @12 V.
-
RS485 Modbus, baud 4,800–230,400 bps.
-
Amostragem: leitura de pedido-resposta até 200 Hz.
-
Algoritmo: fusão de filtro de Kalman e algoritmo dedicado de direção AGV.
-
Software: suite gratuita para PC com painéis ao vivo, gráficos de curvas, visualização 3D (carro/esfera/cubo/plano), configuração (desvio, referência de ângulo, calibração de aceleração, fatores de escala), gravação de dados &e salvamento direto, e importação para Matlab.
-
Amigável para desenvolvedores: programas de exemplo e suporte de código para ROS, Linux, C/C#, Python.
-
Ambiental: IP67, -40~80 °C (variante de tabela -40~85 °C mostrada).
-
Cascata: até 32 sensores em RS485 para medição de atitude simultânea.
Diretrizes de Instalação
-
Monte o sensor em uma superfície apertada, plana e estável; bases irregulares causam erro de ângulo (veja FIG.1–2).
-
Mantenha o eixo do sensor paralelo ao eixo medido; evite ângulos entre eixos (veja FIG.3–4).
-
Este modelo suporta apenas instalação horizontal.
Software &e Visualização
-
Painel de Dados Poderoso (ângulos, taxa, aceleração, magnetismo, quaternion, portas, temperatura, voltagem, etc.).
-
Painel de Configuração: taxa de baud, endereço do dispositivo, aquisição automática de viés, reinício do eixo Z, calibração de aceleração, referência de ângulo, calibração manual positiva/negativa e fatores de escala.
-
Modelos 3D para monitorização intuitiva de movimento e curvas em tempo real com atualizações dinâmicas.
-
Visualização de dados brutos e salvamento de arquivos para fácil coleta; importação de análise Matlab suportada.
-
Demonstrativos ROS IMU INS: visualização de rastreamento de atitude e exibição de dados de atitude (yaw/roll/pitch, velocidade angular, aceleração linear).
html
Especificações
Interface &e Desempenho
| Item | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Interface / Protocolo | RS485 / Modbus | RS485 / Modbus |
| Taxa de transmissão | 4,800–230,400 bps | 4,800–230,400 bps |
| Dados de saída | Aceleração de 3 eixos, velocidade angular, ângulo, quaternion | Mesmo |
| Frequência de amostragem | Até 200 Hz (pedido–resposta) | Até 200 Hz |
| Precisão do ângulo XY | 0.1° | 0. 1° |
| Precisão do ângulo Z (erro de rotação de 360°) | 0.1° | 0.15° |
| Faixa de aceleração / resolução | ±4 g / 0.0001 g/LSB | Mesma |
| Faixa de giroscópio / resolução | ±250 °/s / 0.0122 (°/s)/LSB | Mesma |
| Faixa de ângulo / resolução | XZ: ±180°; Y: ±90° / 0.0059° | Mesma |
| Instabilidade de viés do giroscópio (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| Coeficiente de temperatura (XYZ) | 0.002°/°C | 0.002°/°C |
Elétrico, Mecânico &e Ambiente
-
Tensão de alimentação: 9–36 V; Corrente de operação: ≈ 8 mA (12 V)
-
Dimensões: 55 × 36.8 × 24 mm; Comprimento do cabo: 1 m
-
Proteção: IP67
-
Temperatura de operação: -40~80 °C (a variante da tabela também mostra -40~85 °C)
-
Instalação: Montagem horizontal apenas
-
Cascata: Até 32 unidades em RS485
Áreas de Aplicação
AGV/AMR e robôs móveis, drones/UAVs, veículos logísticos não tripulados e módulos de percepção de condução autónoma.
Nomenclatura de Modelos &e Seleção
-
HWT601-AGV-485 – maior precisão no eixo Z (0.1°) e menor instabilidade de viés Z (2°/h).
-
WT601-AGV-485 – especificações padrão do eixo Z (0.15°, 5°/h).
Escolha HWT601 quando a precisão do cabeçalho Z for crítica.
Detalhes

Sensor de atitude de 6 eixos de alta precisão com aceleração de 3 eixos, velocidade angular, ângulo e quaternão. Apresenta algoritmo de cabeçalho AGV, proteção IP67, filtragem de Kalman, aquisição automática de viés e suporte a software para PC.
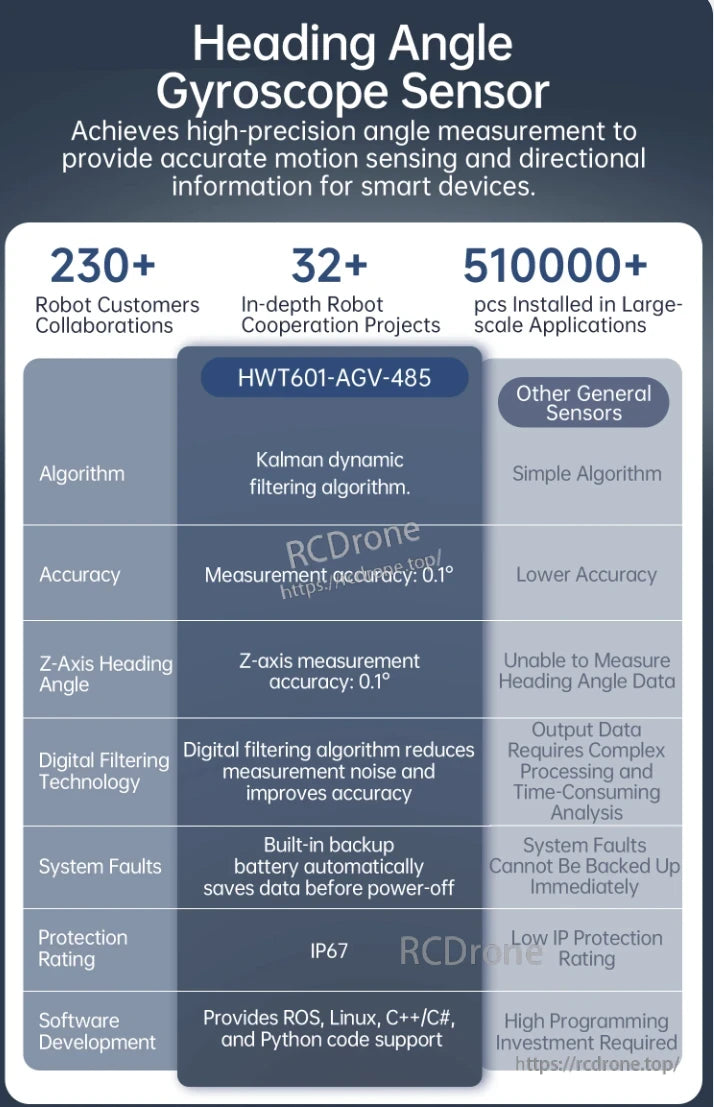
O Sensor de Giroscópio de Ângulo de Cabeçalho HWT601-AGV-485 oferece medição de ângulo de alta precisão com filtragem de Kalman, precisão de 0.1°, redução de ruído digital, proteção IP67 e suporta ROS, Linux, C++ e Python. Mais de 230 colaborações robóticas e mais de 510.000 instalações.
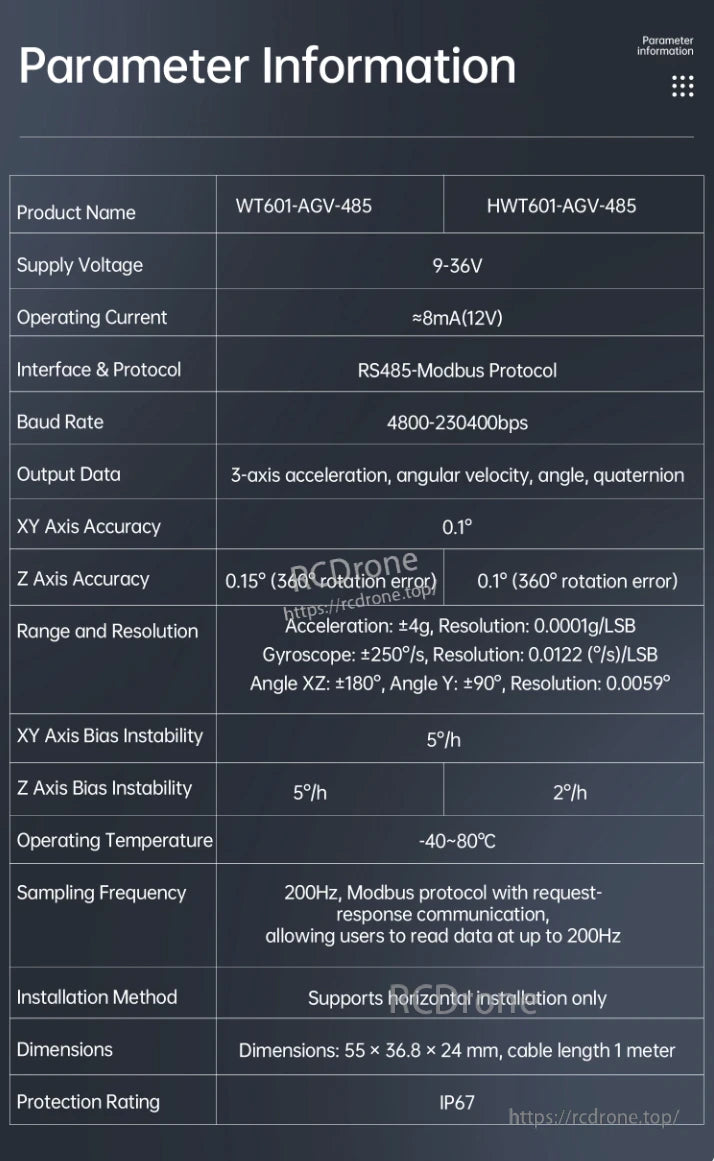
A IMU HWT601-AGV oferece alimentação de 9-36V, RS485-Modbus, amostragem a 200Hz, aceleração de ±4g, giroscópio de ±250°/s, classificação IP67, operação de -40~80°C. Fornece dados 3-eixos precisos e de alta resolução.
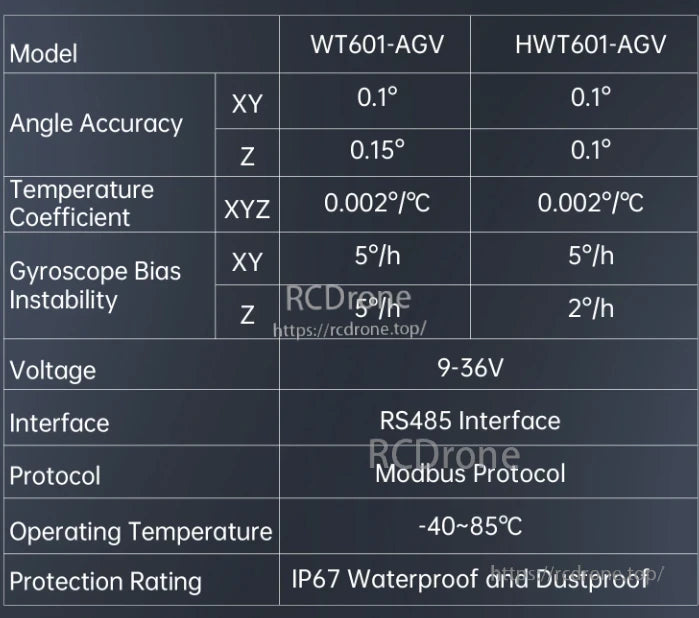
A IMU HWT601-AGV oferece uma precisão de ângulo de 0.1° nos eixos XY e Z com um coeficiente de temperatura de 0.002°/°C em XYZ. A instabilidade do viés do giroscópio é de 5°/h (XY) e 2°/h (Z). Funciona com 9–36V, utiliza RS485 com Modbus e opera de -40 a 85°C. Classificada como IP67, oferece proteção contra água e poeira. A variante WT601-AGV tem especificações semelhantes, mas com precisão de 0.15° no eixo Z e instabilidade de viés de 5°/h no eixo Z. Ambos os modelos garantem desempenho confiável em ambientes exigentes.
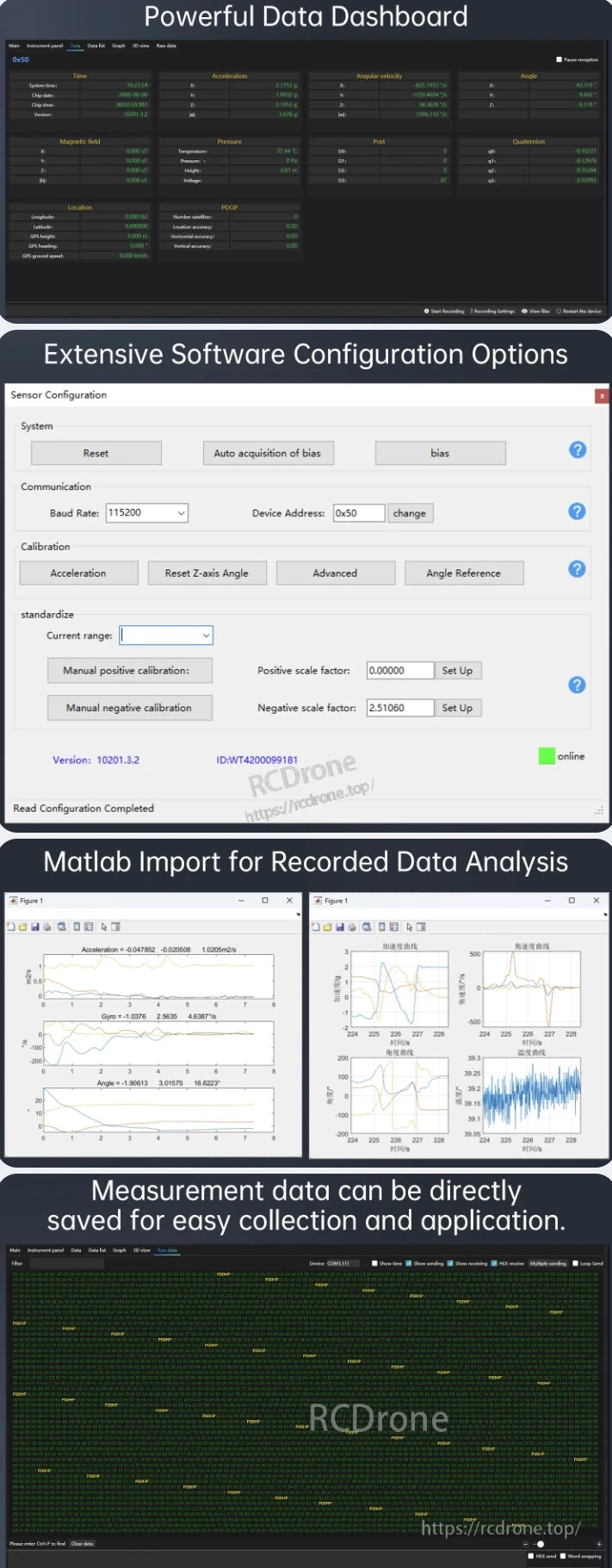
Painel de dados poderoso com leituras de sensores em tempo real, configuração de software extensa, importação de MATLAB para análise e salvamento direto de dados para fácil coleta e aplicação.
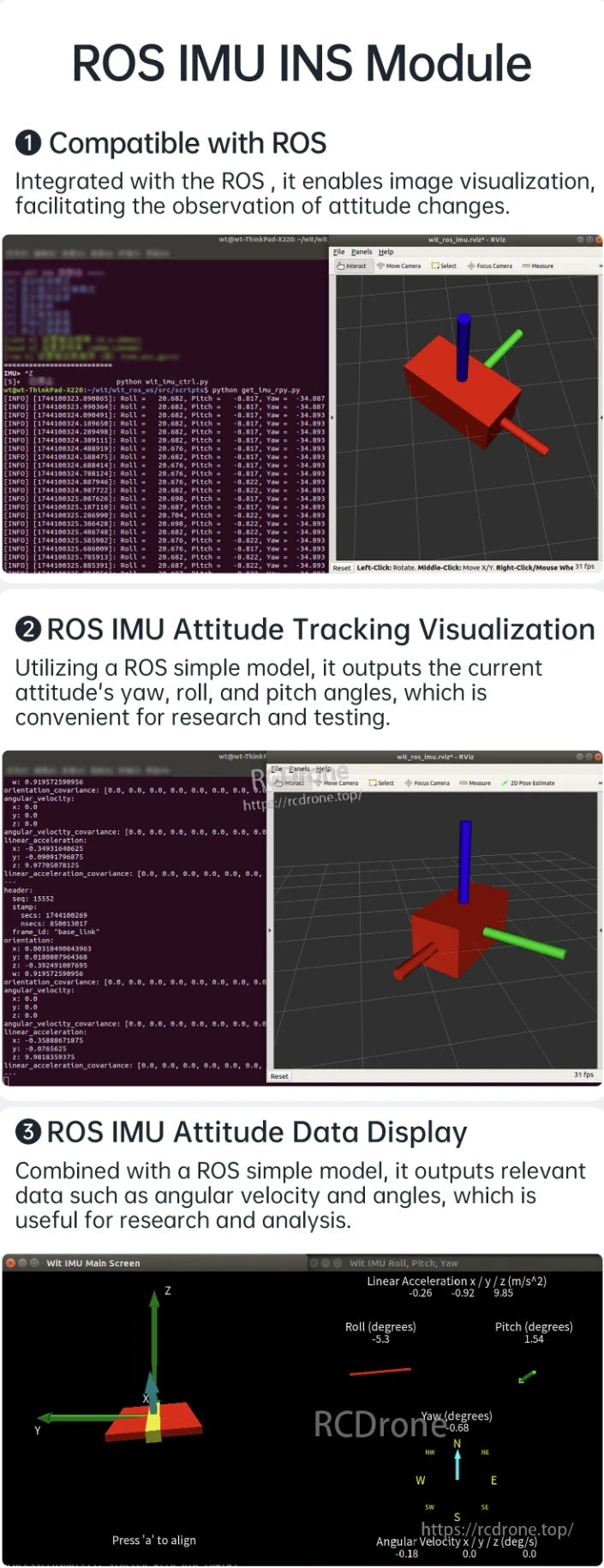
O Módulo ROS IMU INS oferece compatibilidade com ROS, visualiza o rastreamento de atitude e exibe em tempo real o roll, pitch, yaw, velocidade angular e aceleração linear para pesquisa e análise.
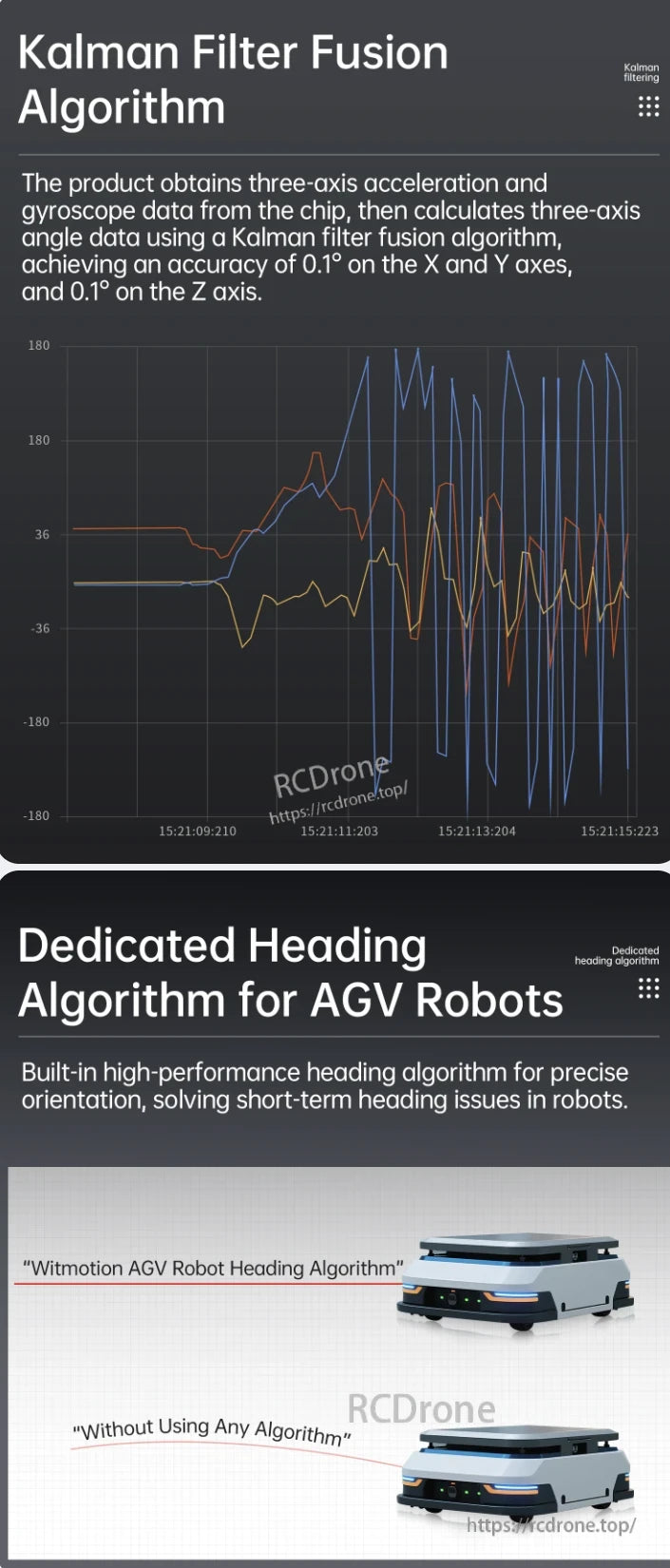
O WitMotion HWT601 AGV IMU fornece dados de ângulo precisos em 3 eixos com uma precisão de 0,1° utilizando fusão de filtro de Kalman. Seu algoritmo de direção dedicado garante uma orientação estável do robô, melhorando significativamente o desempenho em comparação com sistemas sem tais algoritmos.
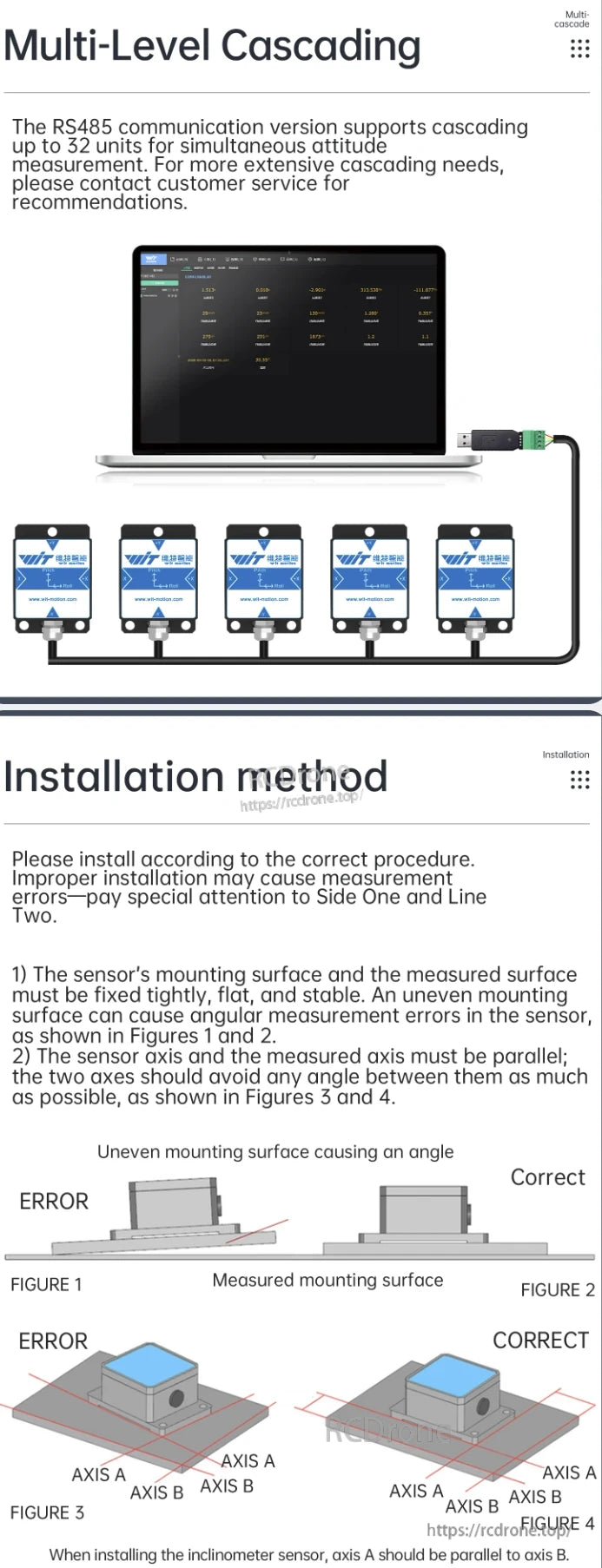
O WitMotion HWT601 AGV IMU suporta até 32 unidades em cascata via RS485 para medição de atitude. Assegure uma montagem plana e estável e eixos alinhados para precisão.
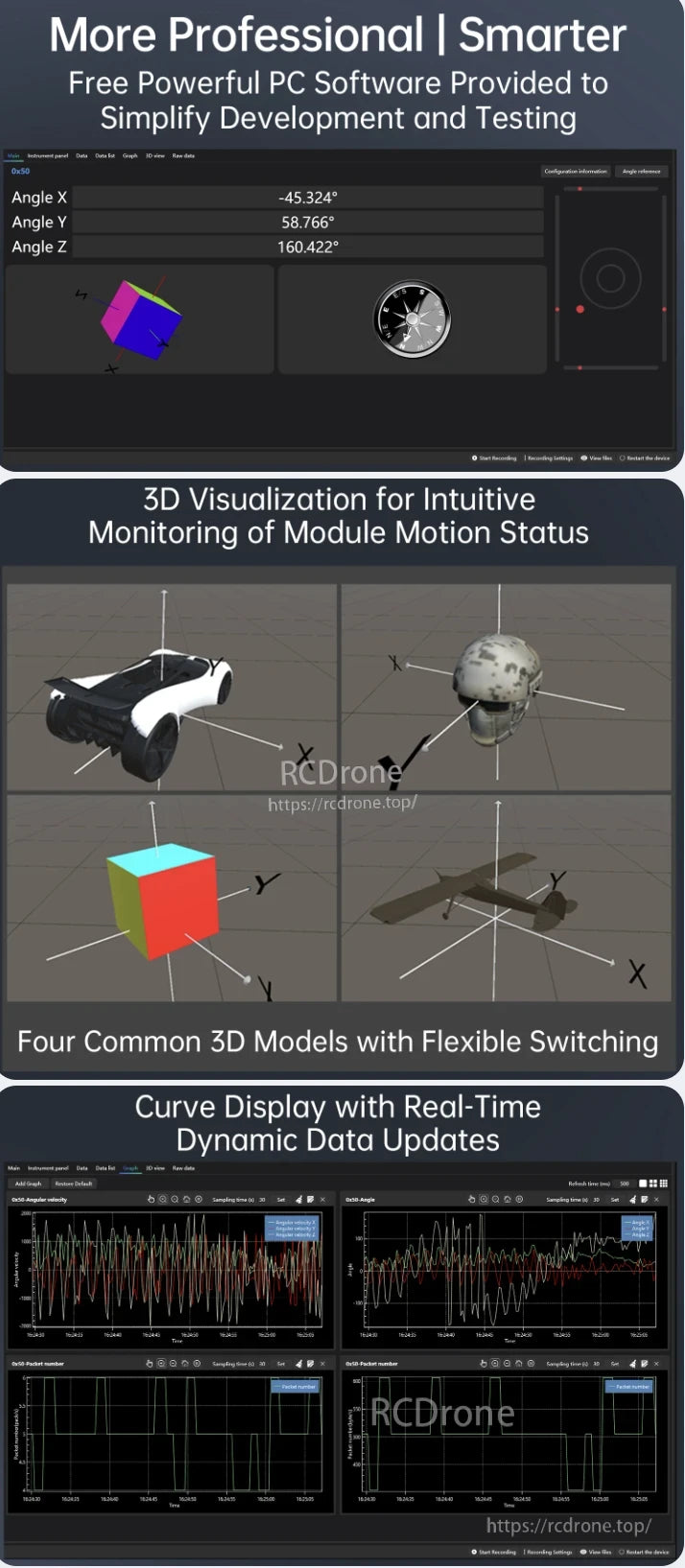
O software profissional para PC do WitMotion HWT601 AGV IMU oferece visualização 3D em tempo real, monitoramento de ângulo e exibição de curvas dinâmicas.As características incluem rastreamento de movimento intuitivo, troca de modelo flexível e atualizações de dados em tempo real para um desenvolvimento e teste eficientes.
A documentação de suporte inclui programas de exemplo para STM32, Arduino, 51 UART, Windows C++ e Matlab para ajudar os desenvolvedores a aplicar o produto utilizando tutoriais e exemplos de código.
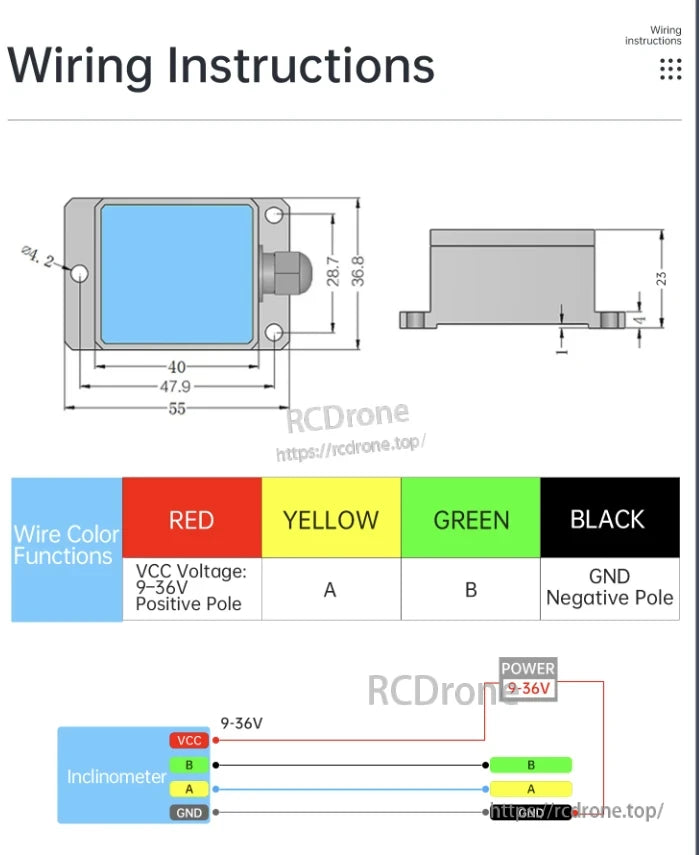
Guia de fiação do WitMotion HWT601 AGV IMU: vermelho (9-36V), amarelo (A), verde (B), preto (GND). Dimensões e diagrama de conexão fornecidos.

WitMotion HWT601 AGV IMU para drones, condução autónoma, robôs móveis e veículos logísticos não tripulados.
Related Collections








