WitMotion WT61 IMU (MPU6050) – Acelerómetro 6 Eixos + Giroscópio com Saída de Ângulo, Kalman AHRS, TTL Serial, 20/100 Hz, 3.3–5 V para Arduino/Raspberry Pi/PC
WitMotion WT61 IMU (MPU6050) – Acelerómetro 6 Eixos + Giroscópio com Saída de Ângulo, Kalman AHRS, TTL Serial, 20/100 Hz, 3.3–5 V para Arduino/Raspberry Pi/PC
WitMotion
Não foi possível carregar a disponibilidade de recolha
Visão Geral
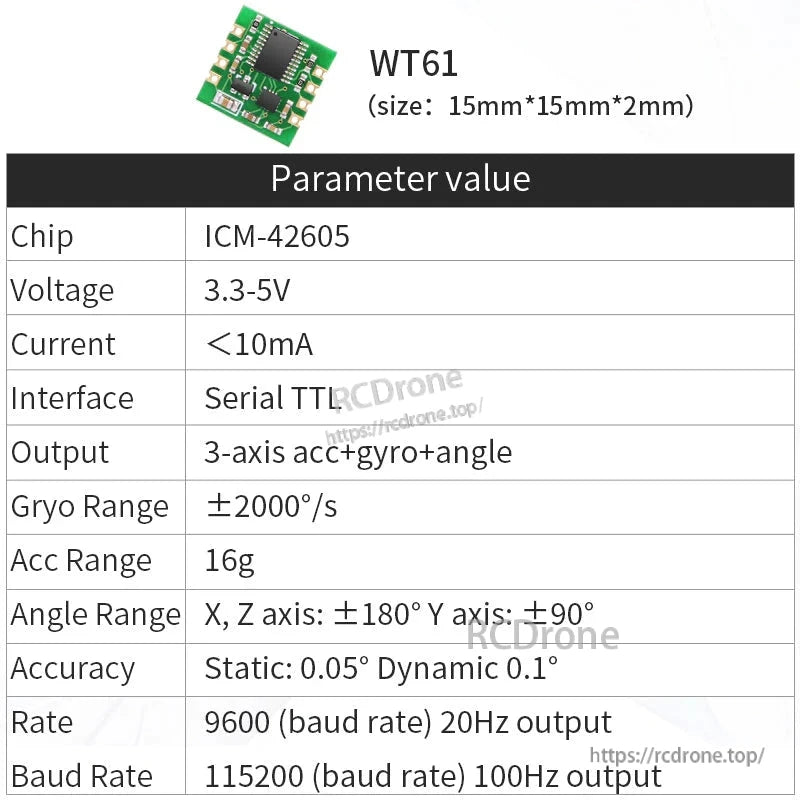
O WitMotion WT61 é um sensor de atitude MEMS de 6 eixos que fornece 3 eixos de aceleração, 3 eixos de velocidade angular e ângulo fundido (roll/pitch/yaw). Utiliza um MCU de 48 MHz com um IMU embutido (MPU6050, conforme a nomenclatura do modelo) e a fusão dinâmica + filtragem de Kalman da WitMotion para oferecer alta estabilidade, baixo ruído e resultados de ângulo precisos. O módulo comunica-se via Serial TTL e é pequeno (15,24 × 15,24 × 2 mm, ~1 g), tornando-o fácil de embutir em dispositivos IoT, robôs, máquinas móveis, monitoramento estrutural, eletrónica de consumo e gadgets de VR.
Principais Características
-
3 saídas: aceleração, velocidade angular e ângulo (atitude).
-
Algoritmo de fusão: fusão dinâmica + filtragem de Kalman; herança de algoritmo de atitude de grau de satélite; precisão do ângulo 0,05° (estático), 0,1° (dinâmico).
-
Hardware de alta qualidade: MCU de núcleo de 48 MHz, chip de potência estável, pads de cobre imersos em ouro, sensor MEMS embutido.
-
Pequena & luz: 15,24 × 15,24 × 2 mm, ~1 g; montagem horizontal/vertical suportada.
-
Taxas de dados selecionáveis & baud: 20 Hz / 100 Hz taxa de retorno; 9600 / 115200 bps.
-
Aplicativo Android + software Windows: plotagem em tempo real, gravação, visualização de dados brutos, exportação TXT, visualizador de demonstração 3D e rica configuração (largura de banda, taxa de saída, colocação, limiares, sono, redefinição do eixo Z).
-
Exemplos de SDK &: Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C++.
-
Documentação & ferramentas: folha de dados, manual, MiniIMU.exe, drivers CH340/CP2102, vídeos de demonstração.
-
Qualidade & suporte: relatório de calibração de fábrica mostrado; RoHS, CE, ISO 9001.
Especificações Técnicas
| Item | Detalhes |
|---|---|
| Modelo / Marca | WT61 / WitMotion |
| Tensão de Alimentação | 3.3 V ~ 5 V |
| Corrente | < 10 mA |
| Interface | Serial TTL |
| Conteúdo da Saída | Aceleração de 3 eixos, velocidade angular de 3 eixos, ângulo |
| Faixa de Aceleração | ±2/±4/±8/±16 g (adaptativo) |
| Faixa de Giroscópio | ±2000 °/s |
| Faixa de Ângulo | X, Z: ±180°; Y: ±90° |
| Precisão do Ângulo | X/Y estático 0.05°; dinâmico 0.1° |
| Estabilidade (desvio) | Acel: 0.01 g; Giro: 0.05 °/s; Ângulo (XY): 0.01° |
| Taxa de Retorno | 20 Hz / 100 Hz |
| Taxa de Baud | 9600 / 115200 bps |
| Resolução de Aceleração | ±2 g: 0.061 mg/LSB (16384 LSB/g); ±4 g: 0.12 mg/LSB (8192 LSB/g); ±8 g: 0.25 mg/LSB (4096 LSB/g); ±16 g: 0.5 mg/LSB (2048 LSB/g) |
| Tamanho / Peso | 15.24 × 15.24 × 2 mm (0.6″ × 0.6″ × 0.08″) / ~1 g |
| Temperatura de Operação | –40 °C a +85 °C |
| Definição do Eixo | Coordenadas cartesianas, regra da mão direita |
| Montagem | Horizontal ou Vertical |
Pinout & Mecânico
Contorno da placa (mm): A = 15.24, B = 15.24, C = 2.54, D = 12.7, E = 2.
Pinos:
| # | Nome | Função |
|---|---|---|
| 1 | D0 | NC reservado |
| 2 | VCC | 3.3–5 V |
| 3 | RT | Dados seriais entrada, Nível TTL |
| 4 | TX | Dados seriais saída, Nível TTL |
| 5 | GND | Terra |
| 6 | SWIM | Interface de dados SWIM |
| 7 | D2 | NC reservado |
| 8 | VCC | 3.3–5 V |
| 9 | SCL | NC reservado |
| 10 | SDA | NC reservado |
| 11 | GND | Terra |
| 12 | D3 | NC reservado |
Fiação do MCU (diagrama mostrado): TTL serial para o MCU host com TX↔RX cruzado (VCC, TX, RX, GND).
Software, Apps & Ferramentas
-
App Android: conectar via USB-para-TTL + OTG do telefone; gráficos em tempo real para Acel/Girosc/Ângulo; Gravar botão; menu de módulos (3-eixos / 6-eixos / 9-eixos / BLE5.0 / WT901-WIFI); ricas Config páginas (calibração de aceleração, direção de instalação, taxa de recuperação, largura de banda de medição, limiar de detecção estática, seleção de padrão).
-
Windows PC (MiniIMU.exe): medidores de atitude ao vivo, curvas em tempo real (“Medição de Dados Sólida como Rocha”), Armazenamento de Dados & Exportar (dados brutos e analisados para formato TXT/CSV), Menu de Configuração (baudrate 115200, modo=Serial, seleção de direção, largura de banda e.g. , 94 Hz, modo de espera, redefinir eixo Z para 0°).
-
Demo 3D: visualiza o movimento do sensor; código fonte 3D oferecido (como indicado).
-
Dispositivo de teste: clipe plug-and-play opcional para fiação sem soldagem (vendido separadamente).
Algoritmos & Desempenho
-
Algoritmo WitMotion × Filtro de Kalman: derivado de Determinação de Atitude de Satélite Aeroespacial métodos; combina fusão cinética, filtragem digital, estimativa de estado; fornece o declarado 0.05°/0.1° precisão do ângulo e excelente estabilidade de viés/baixo ruído (gráfico e emblemas mostrados).
Aplicações Típicas
Dispositivos IoT, monitorização ambiental, proteção de estruturas de edifícios, robótica & automação, energia & petróleo, máquinas móveis , indústria mineira, eletrónica de consumo, gadgets VR.
Conformidade & Suporte
-
Certificados mostrados: Relatório de Calibração, RoHS, CE, ISO 9001.
-
Notas do cartão comparativo: testado na fábrica antes do envio, SDK disponível, garantia de 12 meses, suporte técnico vitalício da WitMotion R&D.
Notas & Acessórios
-
Incluído: módulo WT61.
-
Opcional: conversor USB-para-TTL, adaptador OTG para telefone, dispositivo de teste grampo.
-
Utilize a convenção de coordenadas de mão direita e siga as direções de instalação horizontal/vertical mostradas no software para melhor precisão.
Detalhes

O WitMotion WT61 IMU fornece uma precisão de inclinação de 0,05 graus, filtragem digital, algoritmo de fusão e inclui recursos de aceleração, giroscópio, ângulo, vibração, MCU e filtragem.

O WitMotion WT61 IMU oferece saída de aceleração, giroscópio e ângulo em 3 eixos. Suporta 3.3V-5V, baixo consumo, TTL serial, faixa adaptativa de ±2/4/8/16g, alta precisão, tamanho compacto, peso leve e ampla faixa de temperatura.

O WitMotion WT61 IMU oferece alta precisão com filtragem de Kalman, as certificações incluem RoHS, CE, ISO-9001.Características: MCU de 48MHz, sensor MEMS, chip de potência estável e interface de cobre imersa em ouro.

Algoritmo WitMotion x Filtro de Kalman. O algoritmo WitMotion origina-se do Algoritmo de Determinação de Atitude de Satélites Aeroespaciais, combinado com filtragem de Kalman e fusão dinâmica de movimento. Precisão do ângulo: Eixo X, Y: 0,05° (Estático), 0,1° (Dinâmico). O gráfico exibe dados angulares ao longo do tempo, com linhas azuis, vermelhas e amarelas representando diferentes medições ou saídas filtradas. Os carimbos de data/hora variam de 15:21:09:210 a 15:21:15:223. O eixo vertical varia de -180 a 180 graus.

WitMotion WT61 IMU para IoT, monitorização ambiental, robótica, automação, mineração, pontes, gadgets de VR e aplicações industriais.

A WitMotion IMU oferece alta precisão, estabilidade, tamanho compacto, componentes superiores, SDK, testes de fábrica e suporte vitalício.Inclui filtragem de Kalman, algoritmo de fusão e uma garantia de 12 meses, superando os outros.

O WitMotion WT61 IMU apresenta um layout de 12 pinos com VCC, GND, TX, RX, SCL, SDA, SWIM e portas reservadas; inclui detalhes de tamanho em mm.

O WitMotion WT61 IMU conecta-se via USB a um adaptador OTG para visualização e gravação de dados em smartphone. O aplicativo Android multifuncional exibe dados de sensores em tempo real, incluindo ângulos, aceleração e carimbos de data/hora, com opções para configuração e registro de dados.

O WitMotion WT61 IMU oferece configuração fácil, funcionalidade plug-and-play e medições de atitude em tempo real com leituras de ângulo.

O WitMotion WT61 IMU oferece calibração, medição em tempo real e exportação de dados. Exibe e armazena aceleração, velocidade angular, campo magnético e dados brutos em formato TXT.

A demonstração 3D exibe o movimento do sensor de forma intuitiva. O SDK suporta Matlab, Python, Raspberry Pi, STM32, ROS, Arduino e C++/C#. Conexão serial TTL com MCU; TX e RX estão cruzados.

A demonstração 3D visualiza o movimento do sensor com modelos de carro, capacete, cubo e drone. O SDK suporta Matlab, Python, Raspberry Pi, STM32, ROS, Arduino e C++/C#. Conexão serial via TTL liga o MCU e o módulo com TX e RX cruzados.

Os testes de IMU incluem mesa giratória de 3 eixos, varreduras de vibração, extremos de temperatura, envelhecimento e avaliações de alta temperatura.


O WitMotion WT61 IMU oferece taxa de retorno de 20-100Hz, tensão de 3.3-5V e detecta aceleração, ângulo e giroscópio. Suporta interface TTL, compatível com Android, PC, MCU e Arduino.
Related Collections