Sensor Acelerómetro de Alta Precisão WitMotion WT61C (MPU6050) - 6 Eixos Acc+Giro+Ângulo AHRS IMU para Arduino / TTL & RS232
Sensor Acelerómetro de Alta Precisão WitMotion WT61C (MPU6050) - 6 Eixos Acc+Giro+Ângulo AHRS IMU para Arduino / TTL & RS232
WitMotion
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O WitMotion WT61C é um IMU AHRS de 6 eixos com uma excelente relação custo-benefício, que combina um acelerómetro de 3 eixos e um giroscópio de 3 eixos para fornecer aceleração, velocidade angular e ângulo em 3 eixos (roll/pitch/yaw). Alimentado pelo algoritmo de fusão WitMotion (Kalman), oferece uma precisão de ângulo estático XY de 0,05° (0,1° dinâmico), tornando-o ideal para a deteção de inclinação, vibração e atitude em projetos embutidos, robótica, automação, plataformas de nivelamento e integrações de VR/AR. Suporta interfaces seriais TTL (3,3–5 V) e RS232 (5–36 V) e funciona perfeitamente com Arduino, STM32, C/C++ e MATLAB utilizando o SDK e as ferramentas para PC fornecidas.
Principais Características
-
Saídas de 6 Eixos: aceleração de 3 eixos, velocidade angular de 3 eixos, além de ângulo em 3 eixos.
-
Alta precisão: XY estático 0.05°, dinâmico 0.1°; estabilidade de aceleração 0.01 g.
-
Amplas gamas: Aceleração ±16 g; Giroscópio ±2000 °/s; Ângulo X/Z ±180°, Y 90°.
-
Taxa de saída ajustável: 0.2–100 Hz; baud 9600 / 115200 bps.
-
Interface dupla: TTL 3.3–5 V ou RS232 5–36 V para fácil integração com MCU/industrial.
-
Algoritmo de Fusão WitMotion: Filtragem de Kalman com compensação de deriva para atitude estável.
-
Configurável via software: Calibração de aceleração, orientação de colocação, largura de banda, taxa de saída, redefinir o eixo Z para 0°.
-
Recursos para desenvolvedores: Software gratuito para Windows PC (MiniIMU.exe), drivers (CH340/CP2102), manual &e folha de dados, SDK para 51 serial, C/C++, STM32, Arduino, MATLAB, além de aplicativo Android e vídeos de demonstração.
-
Ferramentas de dados: Visualização de dados brutos, gráficos em tempo real, exportação TXT, e uma demonstração de movimento 3D (código fonte disponível mediante solicitação).
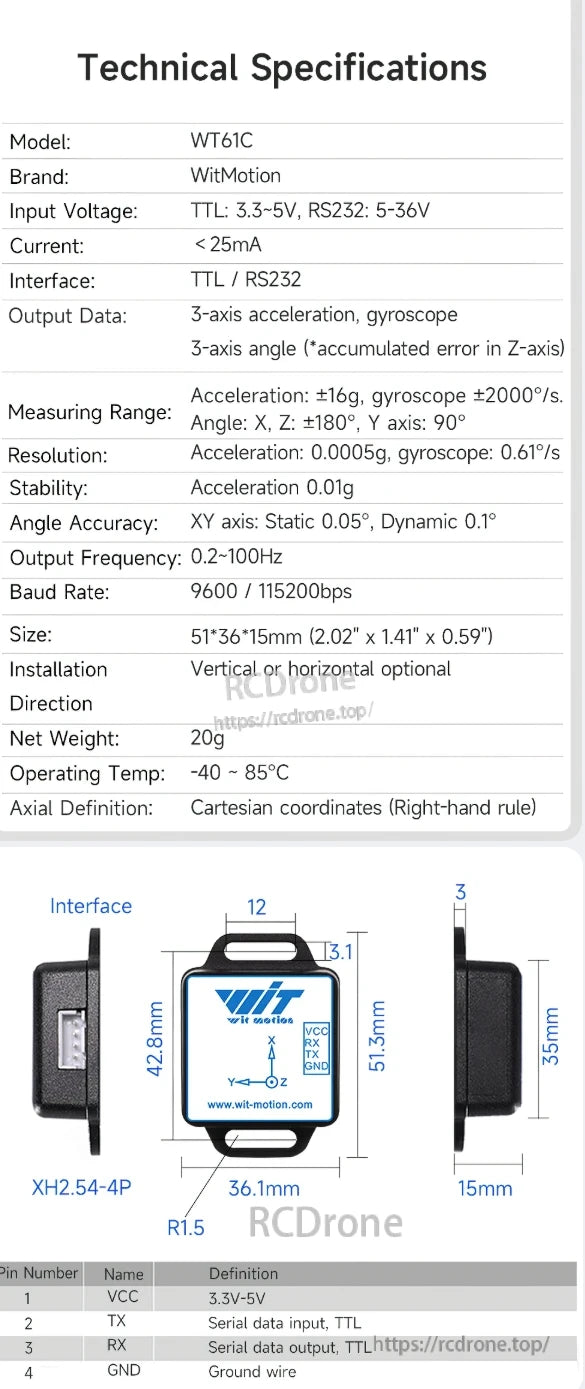
Especificações Técnicas
-
Modelo: WT61C
-
Marca: WitMotion
-
Tensão de Entrada: TTL: 3.3–5 V; RS232: 5–36 V
-
Corrente: < 25 mA
-
Interface: TTL / RS232
-
Dados de Saída: aceleração de 3 eixos, giroscópio de 3 eixos, ângulo de 3 eixos (erro acumulado no eixo Z)
-
Faixa de Medição: Acel ±16 g; Giroscópio ±2000 °/s; Ângulo X/Z ±180°, Y 90°
-
Resolução: Acel 0.0005 g; Giroscópio 0.61 °/s
-
Estabilidade: Acel 0.01 g
-
Precisão do Ângulo: XY estático 0.05°, dinâmico 0.1°
-
Frequência de Saída: 0.2–100 Hz
-
Taxa de Baud: 9600 / 115200 bps
-
Tamanho: 51 × 36 × 15 mm (≈ 2.02″ × 1.41″ × 0.59″)
-
Instalação: Vertical ou horizontal
-
Peso Líquido: 20 g
-
Temperatura de Operação: −40 ~ 85 °C
-
Definição de Eixo: Coordenadas cartesianas, regra da mão direita
Pinout (XH2.54-4P, TTL)
-
VCC — 3.3–5 V
-
TX — Dados seriais entrada, TTL
-
RX — Dados seriais saída, TTL
-
GND — Terra
Protocolo de Saída de Ângulo (cabeça do quadro 0x55 0x53)
| Índice | Byte | Significado |
|---|---|---|
| 0 | 0x55 | Cabeçalho |
| 1 | 0x53 | Identificar como pacote de ângulo |
| 2 | RollL | Byte baixo do ângulo do eixo X |
| 3 | RollH | Byte alto do ângulo do eixo X |
| 4 | PitchL | Byte baixo do ângulo do eixo Y |
| 5 | PitchH | Y-axis angle high byte |
| 6 | YawL | Ângulo do eixo Z byte baixo |
| 7 | YawH | Ângulo do eixo Z byte alto |
| 8 | VL | Versão do firmware baixo |
| 9 | VH | Versão do firmware alto |
| 10 | Soma | Checksum |
Decodificação do ângulo (°):
-
Roll = ((RollH<<8)|RollL) / 32768 * 180 -
Pitch = ((PitchH<<8)|PitchL) / 32768 * 180 -
Yaw = ((YawH<<8)|YawL) / 32768 * 180
Checksum:Soma = 0x55 + 0x53 + RollH + RollL + PitchH + PitchL + YawH + YawL + VH + VL
(Os pacotes de aceleração e velocidade angular seguem um formato semelhante.)
Software &e Integração
-
Ferramentas Windows mostram quadros brutos, dados analisados, gráficos ao vivo e medidores de atitude; suportam gravação &e exportação TXT.
-
Demo 3D visualiza movimento; o código fonte pode ser fornecido.
-
Conexão MCU: serial direta para Arduino/MCU; TTL é recomendado para uma integração mais simples.
Aplicações Típicas
-
Automação &e robótica, monitorização de ângulo de inclinação, plataformas de nivelamento, monitorização de vibrações, testes industriais, integração IoT, headsets VR/AR.
Detalhes

IMU rentável com precisão de 0,05° nos eixos X e Y. Recursos de inclinação, vibração e detecção de atitude utilizando o Algoritmo de Fusão WitMotion. Inclui funções de aceleração, giroscópio, ângulo, vibração, filtragem de Kalman e MCU.
O sensor WitMotion WT61C oferece aceleração de 3 eixos e giroscópio com faixa de ±16g/±2000°/s, resolução de 0.0005g, interface TTL/RS232, taxa de transmissão de 9600/115200bps, operação de -40°C a 85°C e dimensões de 51.3×36.1×15mm.
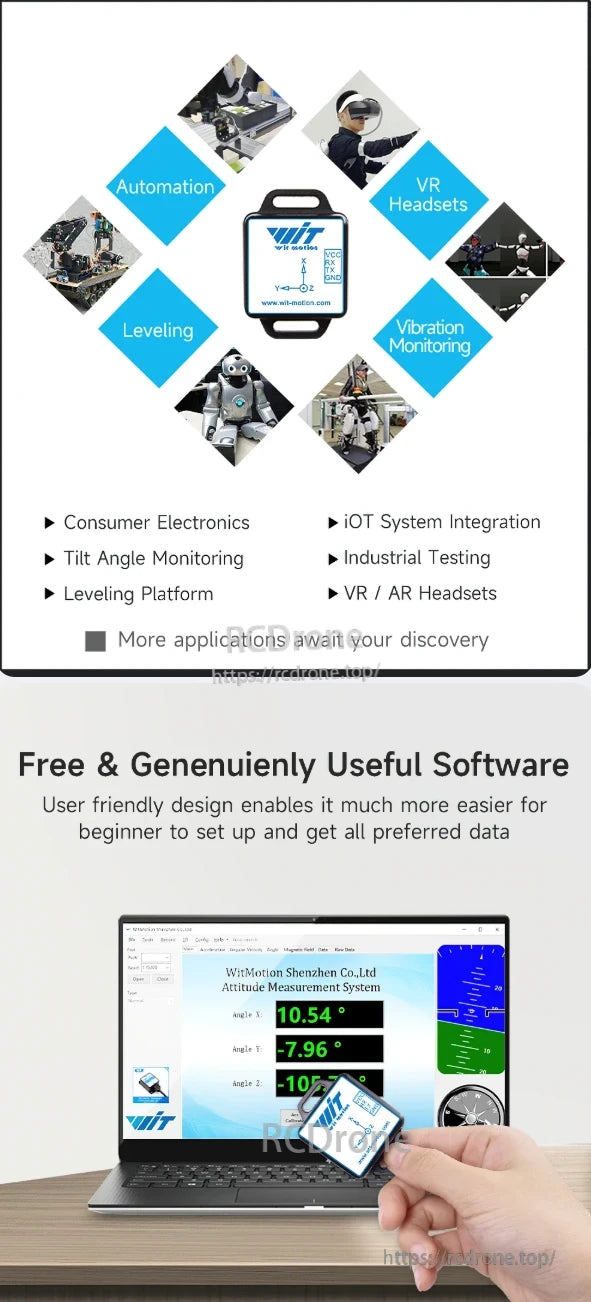
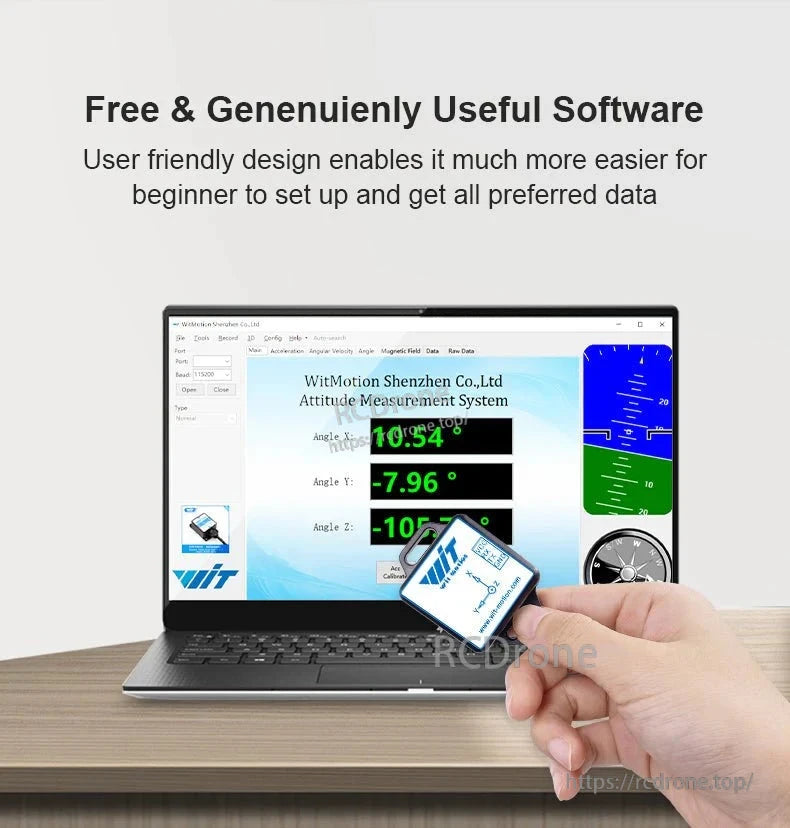
O sensor acelerômetro WitMotion WT61C permite automação, headsets de VR, nivelamento e monitoramento de vibração. Inclui software gratuito para fácil configuração, exibindo dados de atitude em tempo real com uma interface amigável para eletrônicos de consumo, IoT, testes industriais e mais aplicações.
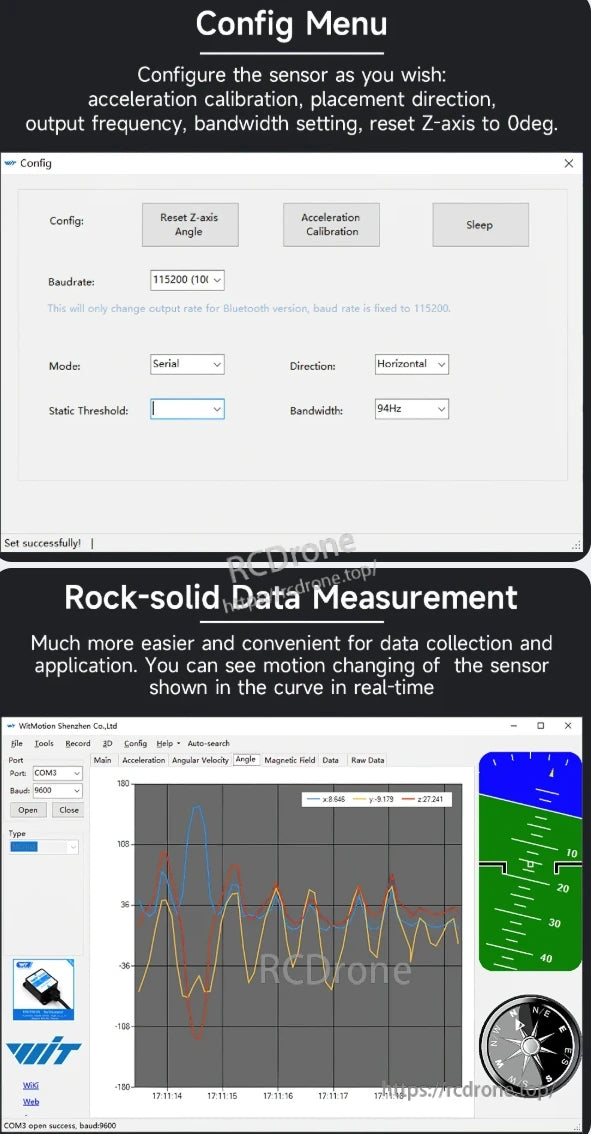
Sensor configurável com calibração de aceleração, configuração de direção e medição de dados em tempo real.As características incluem redefinição do eixo Z, ajuste de largura de banda e exibição de curva de movimento ao vivo para monitorização e análise precisas.
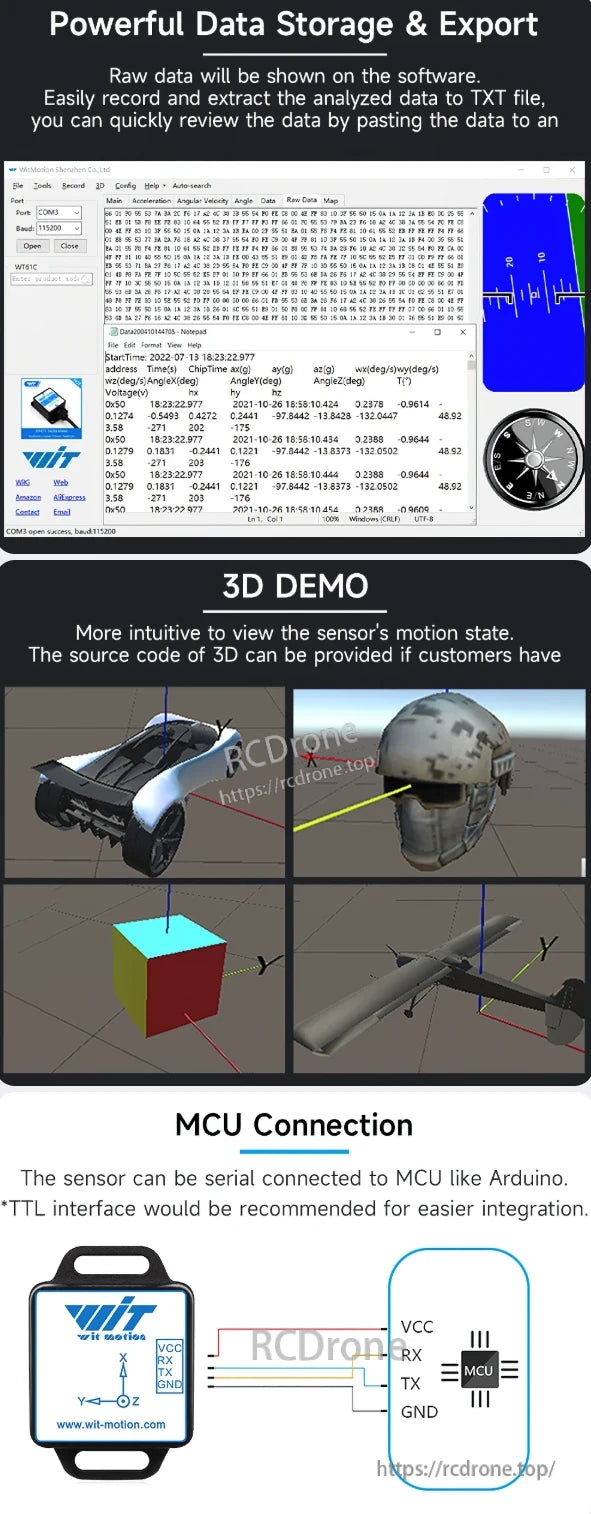
O WitMotion WT61C oferece detecção de movimento de alta precisão com exportação de dados para arquivos TXT, visualização 3D para análise intuitiva de movimento e fácil integração de MCU via interface TTL.

Os Kits de Desenvolvimento para o WitMotion WT61C incluem software, drivers e documentação para STM32, Arduino, Windows e Matlab. Inclui SDK, manuais, folhas de dados, vídeos de demonstração e suporte para aplicativo Android.
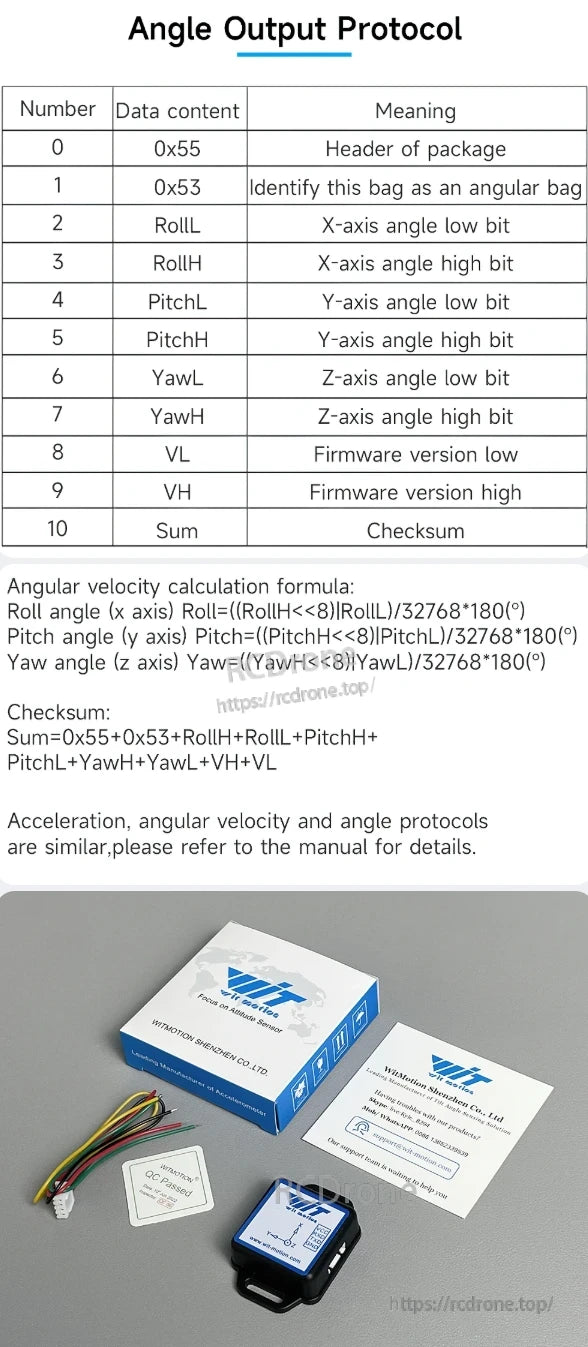
O sensor WitMotion WT61C oferece protocolo de saída de ângulo com rotação, inclinação, guinada, versão de firmware e soma de verificação. Vem com fórmulas de cálculo, documentação, cabos e etiqueta de controle de qualidade.
Related Collections