









WitMotion WT901C 9-Eixos AHRS IMU — Acelerómetro, Giroscópio, Magnetómetro com Ângulo & Quaternio, Precisão 0,05°, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C 9-Eixos AHRS IMU — Acelerómetro, Giroscópio, Magnetómetro com Ângulo & Quaternio, Precisão 0,05°, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O WitMotion WT901C é um IMU AHRS compacto de 9 eixos que combina um acelerómetro de 3 eixos, giroscópio de 3 eixos e magnetómetro de 3 eixos com a fusão/filtragem de Kalman da WitMotion para fornecer ângulos (roll/pitch/yaw), velocidade angular, aceleração, campo magnético e quaternions. Ele oferece uma precisão estática XY de 0.05° (0.1° dinâmica), suporta taxas de atualização de 0.2–200 Hz e comunica através de TTL, RS232 ou RS485 (Modbus)—ideal para medição de inclinação, vibração e atitude em automação, plataformas de nivelamento, VR/AR e testes industriais.
Principais características
-
Alta precisão AHRS: precisão estática XY 0.05°, dinâmica 0.1°; eixos cartesianos de mão direita.
-
Larga I/O & tensão: TTL 3.3–5 V, RS232/RS485 5–36 V, baud 4 800–230 400 (padrão 9 600).
-
Saída configurável: 0.2–200 Hz (padrão 10 Hz); conteúdos selecionáveis pelo utilizador.
-
Dados completos de 9 eixos: Aceleração, velocidade angular, campo magnético, ângulo & quaternion.
-
Ferramentas de visualização: Software Windows MiniIMU com gráficos em tempo real, registo/exportação de dados brutos (TXT), demonstração de movimento 3D, e calibração magnética visual.
-
Recursos para desenvolvedores: Drivers (CH340/CP2102), manuais/ficha técnica, código de exemplo para 51/C++/STM32/Arduino/Matlab, e aplicativo Android.
-
Instalação flexível: Montagem vertical ou horizontal; compacto 51 × 36 × 15 mm, ~20 g.
html
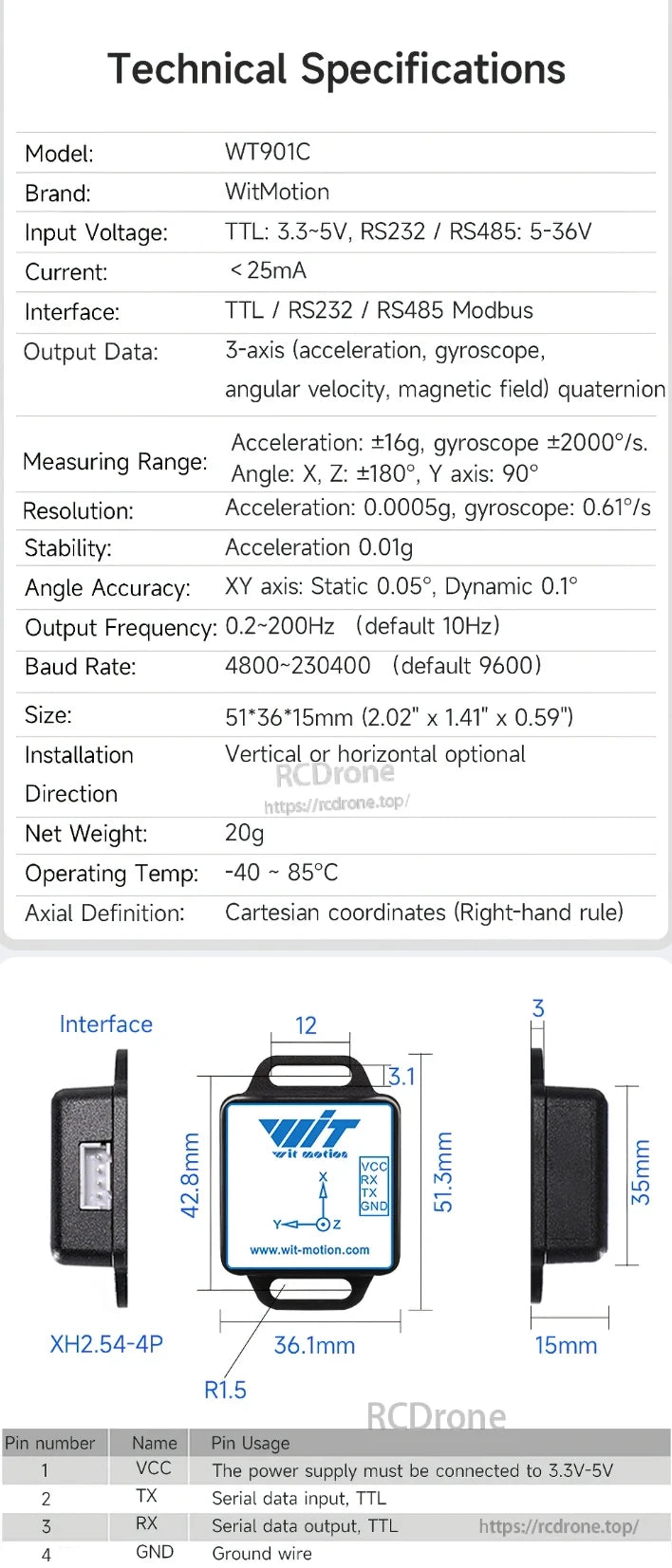
Especificações técnicas
-
Modelo/Marca: WT901C / WitMotion
-
Interfaces: TTL / RS232 / RS485 (Modbus)
-
Tensão de entrada: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
Corrente: < 25 mA
-
Dados de saída: 3-eixos aceleração, giroscópio (velocidade angular), campo magnético, ângulo, quaternion
-
Faixa de medição: Acc ±16 g; Giroscópio ±2000 °/s; Ângulo X,Z ±180°, Y 90°
-
Resolução: Acc 0.0005 g; Giroscópio 0.61 °/s
-
Estabilidade: Acc 0. 01 g
-
Precisão do ângulo: XY estático 0.05°, dinâmico 0.1°
-
Frequência de saída: 0.2–200 Hz (padrão 10 Hz)
-
Taxa de baud: 4 800–230 400 (padrão 9 600)
-
Tamanho / Peso: 51 × 36 × 15 mm / ≈ 20 g
-
Temperatura de operação: −40 ~ 85 °C
-
Definição do eixo: coordenadas cartesianas, regra da mão direita
Dimensões &e conector (versão TTL)
-
Corpo: 51.3 mm (A) × 36.1 mm (L) × 15 mm (P); raio das orelhas de montagem R1.5
-
Conector: XH2.54-4P
-
Pinout (esquerda→direita no rótulo VCC/RX/TX/GND):
-
VCC — alimentação 3.3–5 V
-
TX — Entrada de dados seriais, TTL
-
RX — Saída de dados seriais, TTL
-
GND — terra
-
Nota: O gráfico do eixo está impresso na carcaça (X↑, Y→, Z•), ajudando no alinhamento.
Protocolo de saída de ângulo (quadro 0x55 0x53)
| Byte | Conteúdo | Significado |
|---|---|---|
| 0 | 0x55 | Cabeçalho |
| 1 | 0x53 | ID do quadro de ângulo |
| 2–3 | RollL/RollH | Ângulo do eixo X |
| 4–5 | PitchL/PitchH | Ângulo do eixo Y |
| 6–7 | YawL/YawH | Ângulo do eixo Z |
| 8–9 | VL/VH | Versão do firmware (baixo/alto) |
| 10 | Soma | Checksum |
Conversão de ângulo:Roll = ((RollH<<8)|RollL)/32768*180°Pitch = ((PitchH<<8)|PitchL)/32768*180°Yaw = ((YawH<<8)|YawL)/32768*180°
(Os quadros de aceleração e velocidade angular são semelhantes; consulte o manual.)
Software &e ferramentas
-
Windows (MiniIMU.exe): configuração do dispositivo (intervalos, largura de banda, taxa de saída), gráficos em tempo real, visualização de dados brutos, visualização de pose 3D, exportar para TXT.
-
Calibração de magnetômetro: fluxo de trabalho de ajuste visual de elipses para reduzir o viés (girar em torno de X/Y/Z).
-
Integração de MCU: conexão serial direta; TTL recomendado para ligação simples de MCU (Arduino/STM32, etc.).
-
Recursos incluídos: Datasheet.pdf, Manual.pdf, drivers CH340 &e CP2102, código de exemplo, Aplicativo Android, vídeos de demonstração.
Aplicações típicas
Automação | Monitorização de inclinação/nível | Monitorização de vibrações | Nivelamento de plataformas | Integração de sistemas IoT | Testes industriais | headsets VR/AR | Eletrónica de consumo.
Detalhes

IMU AHRS rentável com precisão de 0,05° nos eixos X e Y. Apresenta inclinação, vibração e detecção de atitude utilizando o Algoritmo de Fusão WitMotion. Inclui aceleração, giroscópio, ângulo, magnético, filtragem de Kalman e funções de quaternions.
O IMU WitMotion WT901C oferece detecção em 3 eixos com aceleração, giroscópio e magnetómetro. Fornece saída de quaternions. Suporta TTL, RS232, RS485. Mede ±16g, ±2000°/s, ângulos de ±180°. Tamanho compacto de 51×36×15mm. Funciona de -40 a 85°C.

O IMU WitMotion WT901C suporta automação, headsets VR, nivelamento e monitorização de vibrações. É adequado para eletrónica de consumo, IoT, testes industriais e AR/VR. Vem com software gratuito para exibição de dados de ângulo em tempo real.

O menu de configuração do IMU WitMotion WT901C permite a calibração do sensor, configurações de saída de dados e visualização de movimento em tempo real. Suporta algoritmo de 9 eixos, aceleração ajustável, giroscópio, largura de banda e fuso horário GPS. Gráficos em tempo real mostram aceleração e velocidade angular para medições precisas.
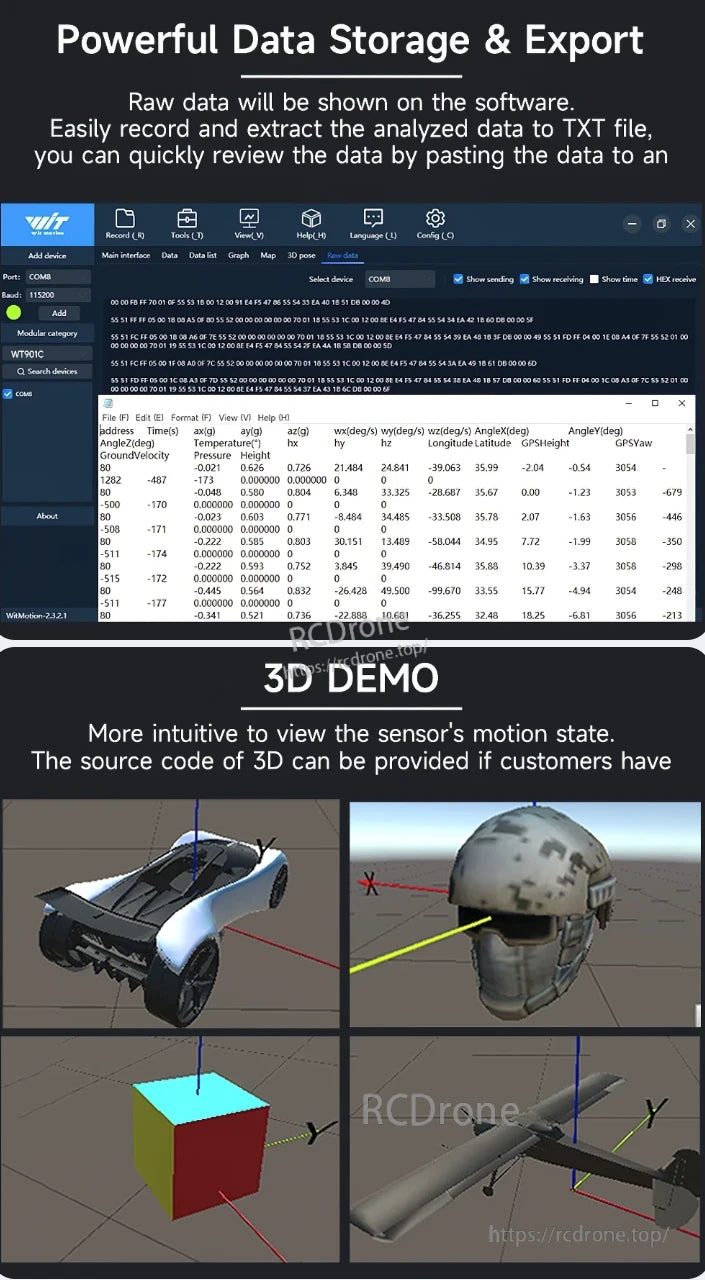
O IMU WitMotion WT901C oferece armazenamento de dados poderoso, fácil exportação em TXT e visualização de movimento 3D com código-fonte disponível.
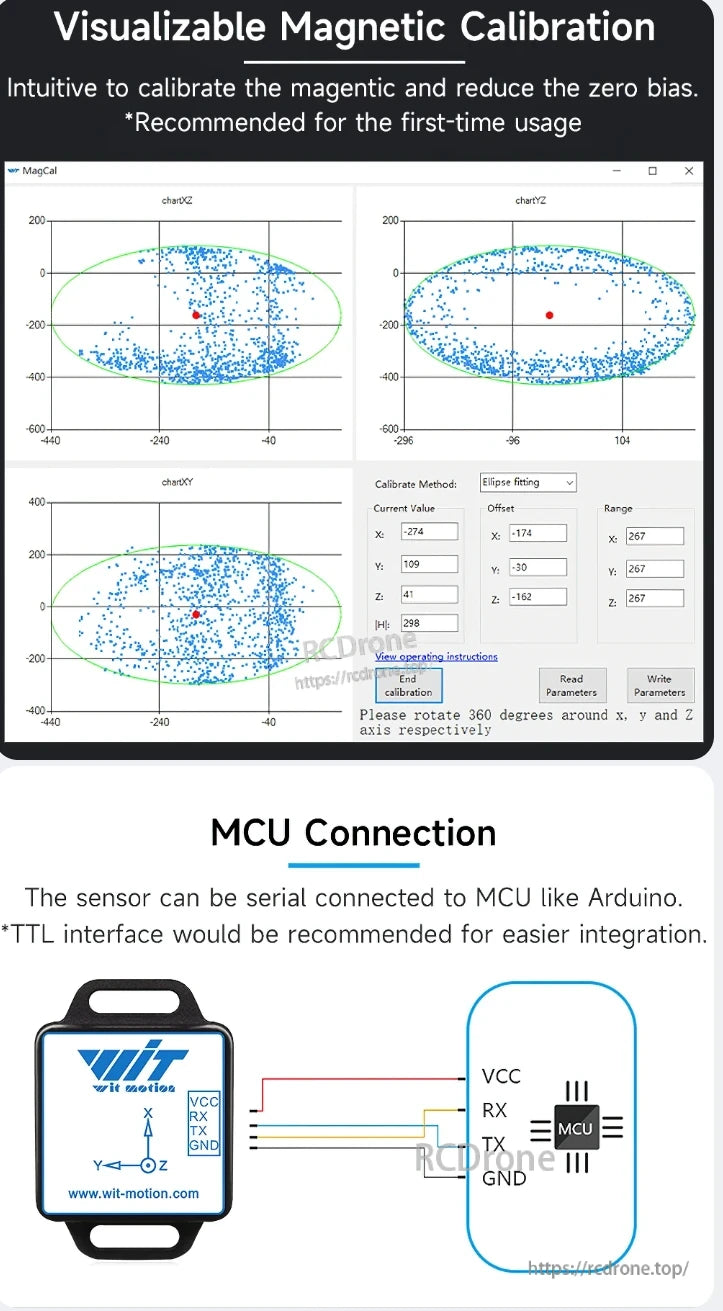
Calibração magnética visualizável para o IMU WT901C com método de ajuste de elipse. Conexão do MCU via interface TTL recomendada. O sensor conecta-se a MCUs semelhantes ao Arduino usando os pinos VCC, RX, TX, GND.
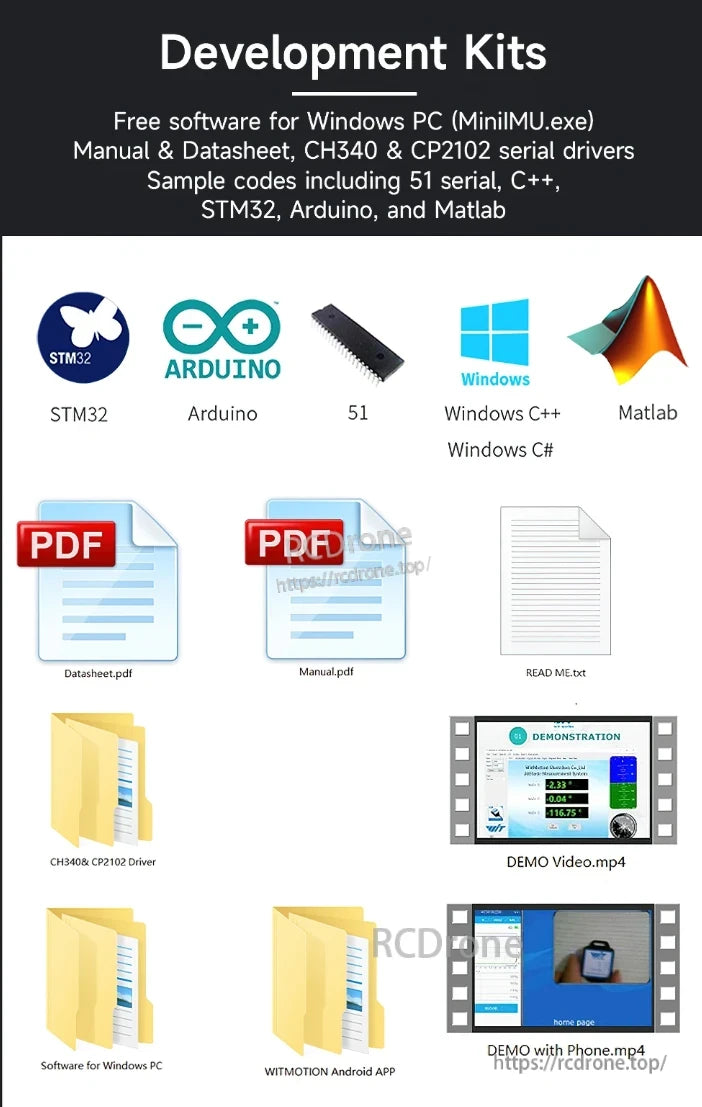
Os Kits de Desenvolvimento incluem software gratuito para Windows, manual, folha de dados, drivers CH340 & CP2102, códigos de exemplo para 51, C++, STM32, Arduino e Matlab, juntamente com vídeos de demonstração e aplicativo para Android.
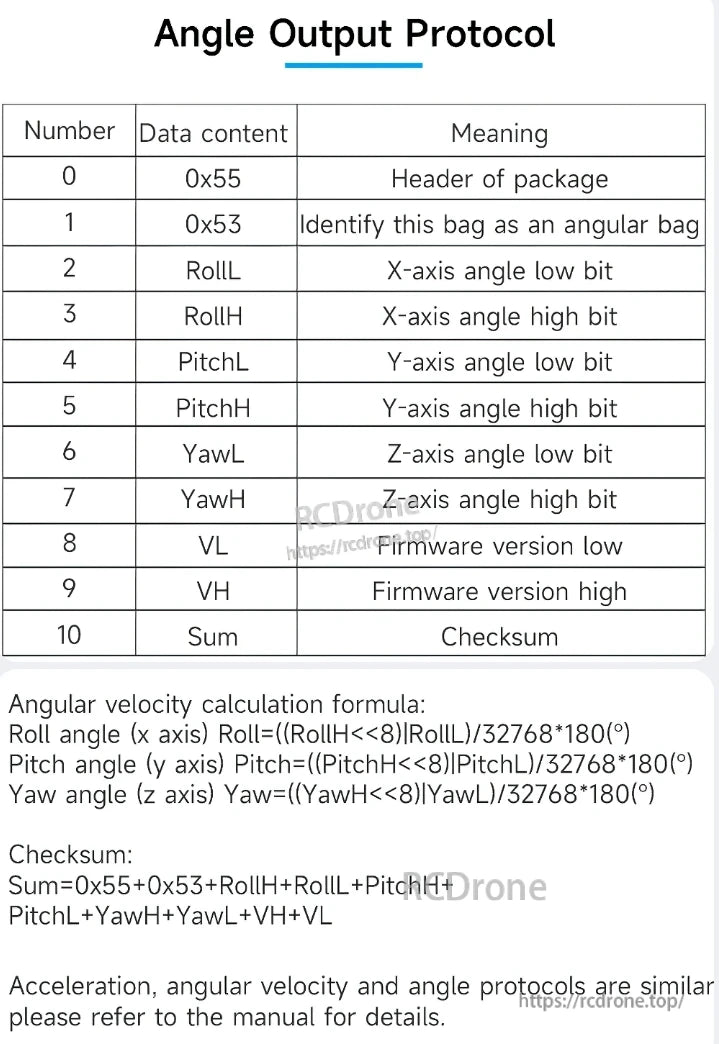
A estrutura de dados para a saída de ângulo do IMU WT901C inclui cabeçalho, rotação, inclinação, guinada, versão do firmware e soma de verificação. Fórmulas para cálculos e verificação são fornecidas. Estruturas semelhantes existem para aceleração e velocidade angular.
Related Collections









