








Módulo GPS GNSS RTK WitMotion WTRTK-M ZED-F9P, posicionamento diferencial ao centímetro para UAV/Carro, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
Módulo GPS GNSS RTK WitMotion WTRTK-M ZED-F9P, posicionamento diferencial ao centímetro para UAV/Carro, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O WTRTK-M é um módulo de posicionamento diferencial RTK de alta precisão, baseado no motor GNSS u-blox ZED-F9P. Ele rastreia GPS, GLONASS, Galileo, BeiDou e QZSS simultaneamente e oferece uma precisão a nível de centímetros após a correção RTK. O módulo proporciona recepção de dupla frequência, saída em tempo real de 5 Hz para aplicações de mapeamento/autônomas, e uma ferramenta para PC para configuração com uma tecla de estações móveis/base e visualização de rotas. Tecnologias de anti-interferência e calibração melhoram a estabilidade e segurança dos dados.
Principais Características
-
RTK a nível de centímetros: fluxo de trabalho móvel/base com rápida convergência.
-
Multi-constelação, dupla frequência: GPS L1/L2; GLONASS G1/G2; BeiDou B1/B2; Galileo E1/E5b; QZSS L1/L2.
-
Alta sensibilidade &e arranque rápido: 184 canais; arranque a frio 24 s, arranque a quente 2 s, recaptura 2 s; convergência ≤10 s.
-
Desempenho de tempo/direção: 1PPS RMS 30 ns (99% 60 ns); precisão de direção 0.4° (dinâmica 0.3°).
-
Protocolos ricos: NMEA, UBX, RTCM 3.3; fase portadora (RAWX) suportada.
-
Taxa configurável &e 1 PPS: 0.25–20 Hz de atualização (padrão 1 Hz); segundo pulso 0.25 Hz–10 MHz (período padrão 1 s, nível alto ~100 ns).
-
Dual UART (TTL) e opções de antena SMA-K / IPEX; software para PC para visualização de trilhos e configuração do dispositivo.
-
Cenas de aplicação: mapeamento/levantamento de UAV, tratores/autómatos autónomos, navegação de veículos de alta precisão, robótica.
Como funciona o RTK (breve)
Uma estação base fixa calcula o erro de medição dos satélites em relação à sua posição conhecida e transmite dados diferenciais RTCM. A estação móvel aplica estas correções para alcançar um posicionamento em tempo real a nível de centímetros.
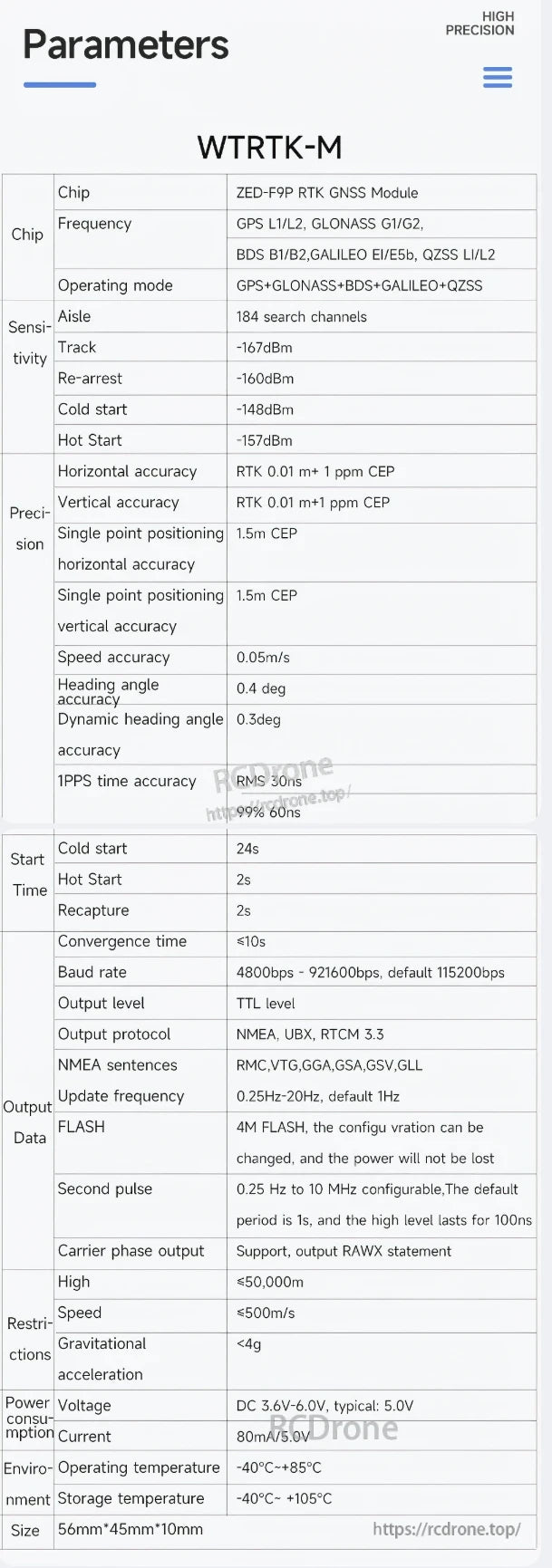
Especificações Principais
| Item | Especificação |
|---|---|
| Chip GNSS | Módulo GNSS RTK ZED-F9P |
| Constelações/Bandas | GPS L1/L2, GLONASS G1/G2, BeiDou B1/B2, Galileo E1/E5b, QZSS L1/L2 |
| Canais | 184 canais de busca |
| sensibilidade | Rastreamento -167 dBm; reacquisition -160 dBm; arranque a frio -148 dBm; arranque a quente -157 dBm |
| Precisão RTK (CEP) | Horizontal/Vertical: 0.01 m + 1 ppm CEP |
| Precisão de ponto único (CEP) | Horizontal 1.5 m, Vertical 1.5 m |
| Precisão de velocidade | 0.05 m/s |
| Precisão de direção | 0.4° (dinâmico 0.3°) |
| Precisão de tempo 1PPS | RMS 30 ns, 99% 60 ns |
| Início/Recuperação | Frio 24 s, Quente 2 s, Recuperação 2 s; Convergência ≤10 s |
| Taxa de baud | 4 800–921 600 bps (padrão 115 200 bps) |
| Nível elétrico | TTL |
| Protocolos | NMEA, UBX, RTCM 3.3; Sentenças NMEA: RMC/VTG/GGA/GSA/GSV/GLL |
| Taxa de atualização | 0.25–20 Hz (padrão 1 Hz); nota: taxas muito altas aumentam a carga serial—manter ≤ 5 Hz para fiabilidade |
| Flash a bordo | 4 MB, mantém a configuração após desligar |
| Fase do portador | Saída RAWX suportada |
| Restrições | Altitude ≤ 50 000 m; Velocidade ≤ 500 m/s; Aceleração < 4 g |
| Fonte | DC 3.6–6.0 V (típ. 5.0 V), ≈ 80 mA @ 5 V |
| Operação / Armazenamento | -40 °C a +85 °C / -40 °C a +105 °C |
| Dimensões | 56 × 45 × 10 mm (marcas do diagrama frontal ~46 mm de altura) |
Interfaces &e Indicadores
Antenna: SMA-K (com opção IPEX).
Portas UART (TTL, 4 pinos cada):
-
P1 (direita) – VI (3.6–6.0 V, 5 V rec.), G (GND), T1 (TX), R1 (RX).
-
P2 (esquerda) – VO (3.6–6.0 V, 5 V rec.), G (GND), T2 (TX), R2 (RX).
P2 é utilizado para entrada/saída RTCM; P1 emite dados NMEA. P1/P2 VCC estão conectados internamente—pode-se alimentar a partir de qualquer um.
LEDs
-
PWR: Vermelho ligado = energia aplicada.
-
TX1/TX2: Verde a piscar = porta com saída de dados.
-
PPS: Desligado antes da correção; azul a piscar após posicionamento 3D.
-
RTK: Desligado quando não está em RTK; azul a piscar em RTK Float; ligado em RTK Fixed.
Conexão & Software
-
Configuração com fio: conecte a antena ao SMA; conecte UART1 ao PC para visualizar os dados de localização.
-
Base/Móvel: defina um módulo como base (produz RTCM); o móvel consome RTCM para alcançar RTK—o móvel pode ser usado diretamente como um rover RTK após receber correções.
-
Software para PC: visualização de rastreamento, visualização de dados e configuração de base/rover com uma tecla.
Notas
-
A taxa de baud padrão é 115 200 bps. Se aumentar a frequência de saída, aumente a taxa de baud de acordo para evitar sobrecarga (taxa máxima prática ≤ 5 Hz em links padrão).
-
Desenvolvimento personalizado suportado.
Detalhes
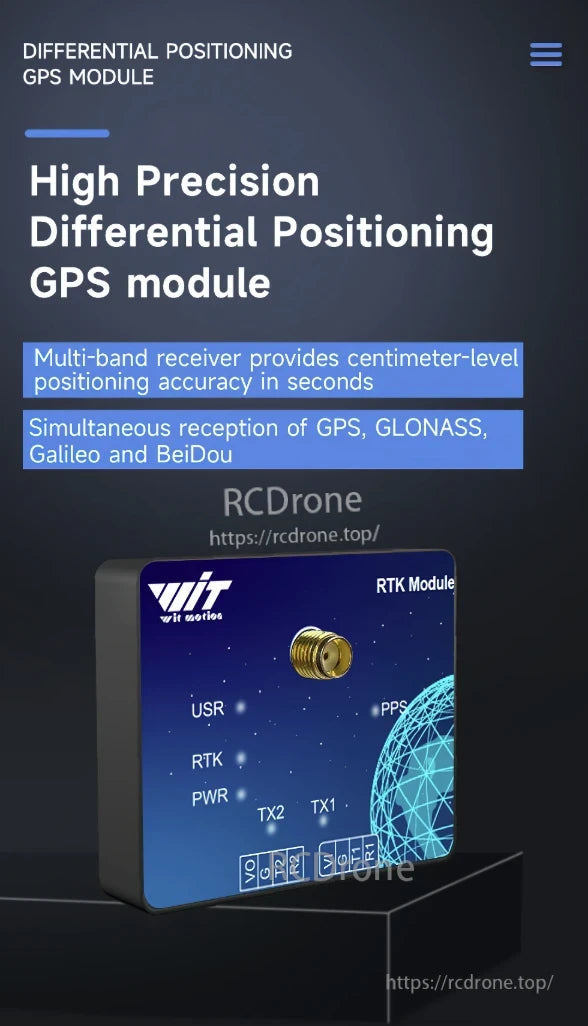
Módulo GPS de posicionamento diferencial de alta precisão com precisão a nível de centímetros. Suporta GPS, GLONASS, Galileo, BeiDou.Receptor multi-banda, tecnologia RTK, PPS, TX1, TX2, USR, RTK, indicadores PWR.
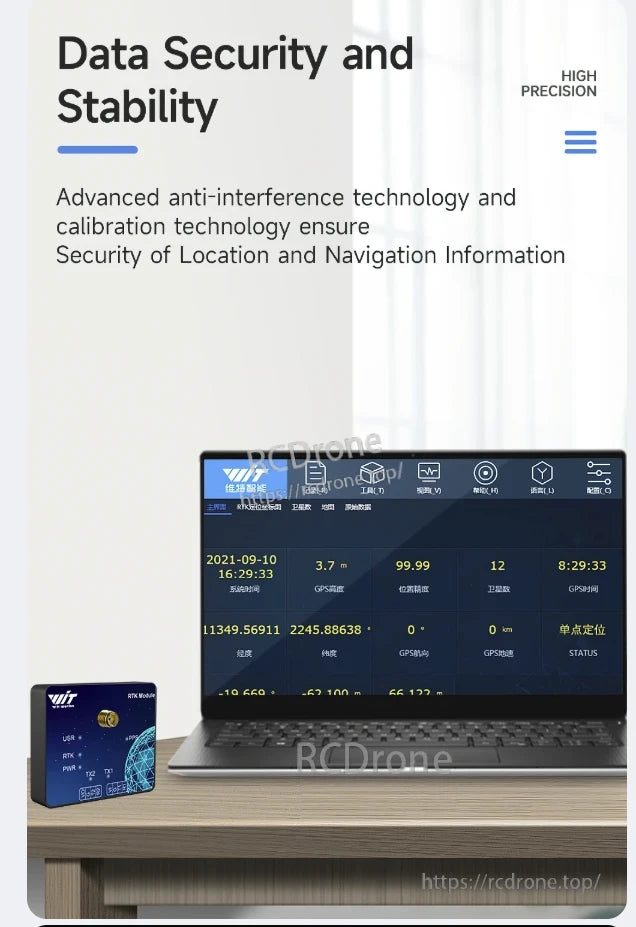
O WitMotion WTRTK-M ZED-F9P RTK GNSS GPS garante segurança e estabilidade de dados de alta precisão com tecnologia avançada de anti-interferência e calibração para informações de localização e navegação fiáveis.
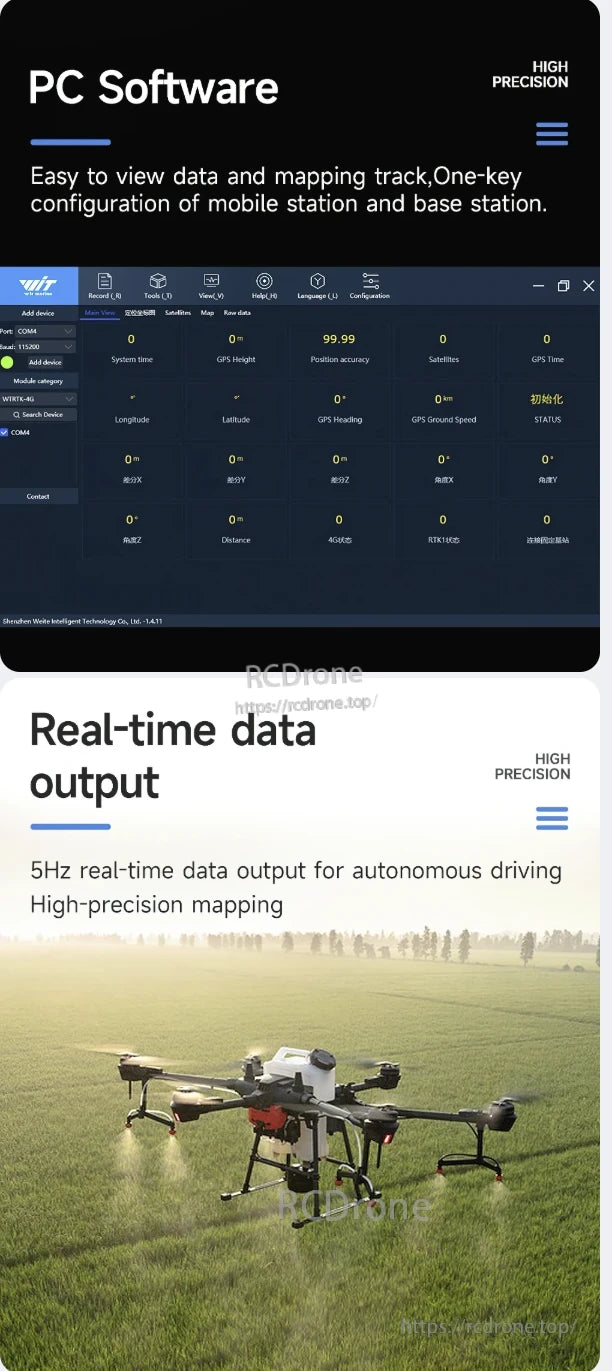
Software de GPS GNSS RTK de alta precisão com saída de dados em tempo real de 5Hz para condução autónoma e mapeamento. Suporta configuração com uma tecla, rastreamento de satélites, posicionamento preciso e telemetria detalhada.
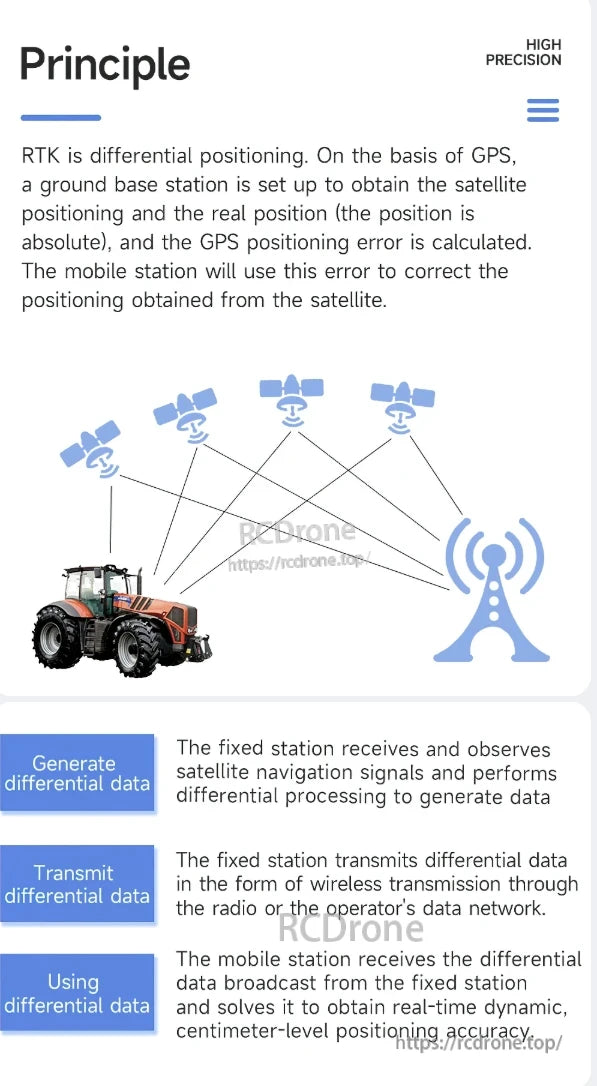
O RTK utiliza posicionamento diferencial com GPS. Uma estação fixa calcula erros de posicionamento de satélites e transmite correções sem fio para uma estação móvel, permitindo precisão em tempo real a nível de centímetros para navegação precisa.
O WTRTK-M apresenta o módulo GNSS RTK ZED-F9P com suporte a múltiplas constelações, alta precisão (0.01m), tempos de arranque rápidos, múltiplos protocolos e opera de -40°C a +85°C.


Diagrama de ligação com fio para o módulo RTK WitMotion: configurações de estação base/móvel, antenas SMA, conexões UART1 PC. Inclui software, manual, vídeo e recursos de protocolo.
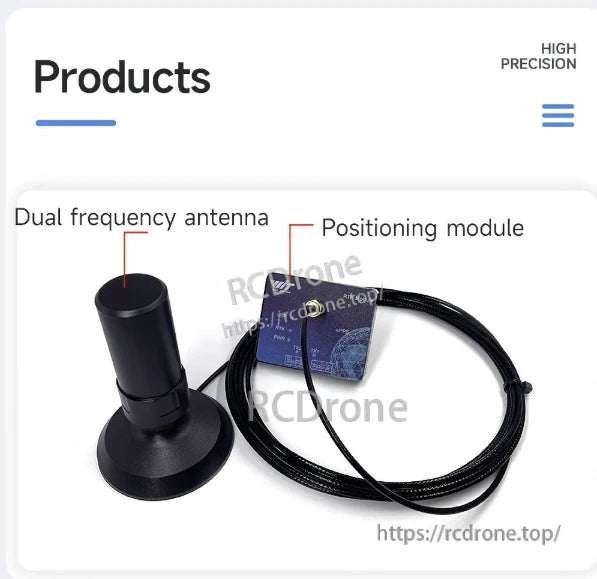
Antenna de dupla frequência e módulo de posicionamento para GNSS GPS de alta precisão
Related Collections








