




ZeroOne X6 Controlador de Voo AutoPilot FMU v6X, STM32H753, ArduPilot, PX4 para Drone VTOL
ZeroOne X6 Controlador de Voo AutoPilot FMU v6X, STM32H753, ArduPilot, PX4 para Drone VTOL
ZeroOne
Preço normal
$519.00 USD
Preço normal
Preço de saldo
$519.00 USD
Preço unitário
por
Impostos incluídos.
Envio calculado na finalização da compra.
Não foi possível carregar a disponibilidade de recolha
Visão Geral
O ZeroOne X6 AutoPilot é um controlador de voo para construções de drones multirotor e VTOL, projetado em torno do padrão de hardware de código aberto FMU v6X. Integra absorção de choque embutida, sensores de baixo ruído com design de compensação de temperatura e uma interface Ethernet de 100Mbps para conectividade expandida.
Principais Características
- Arquitetura de código aberto FMU v6X com referência à documentação do padrão de conector Pixhawk DS-009.
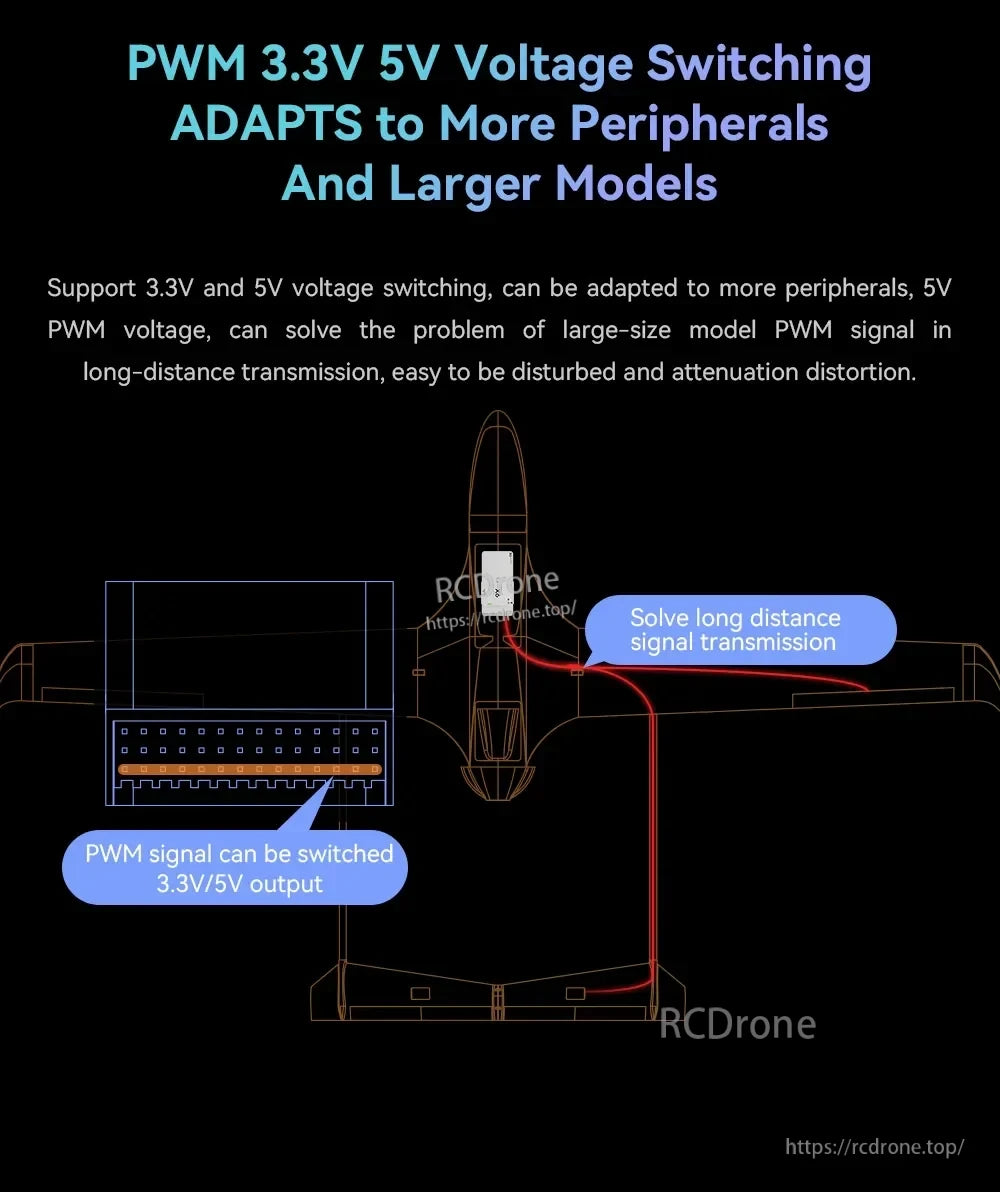
- Comutação de tensão PWM 3.3V/5V para se adaptar a diferentes periféricos e ajudar na transmissão de sinal PWM a longa distância.
- Design de proteção abrangente: proteção contra sobrecorrente/sobrevoltagem, proteção de limitação de corrente do receptor, proteção ESD para portas e filtro EMI de alimentação.
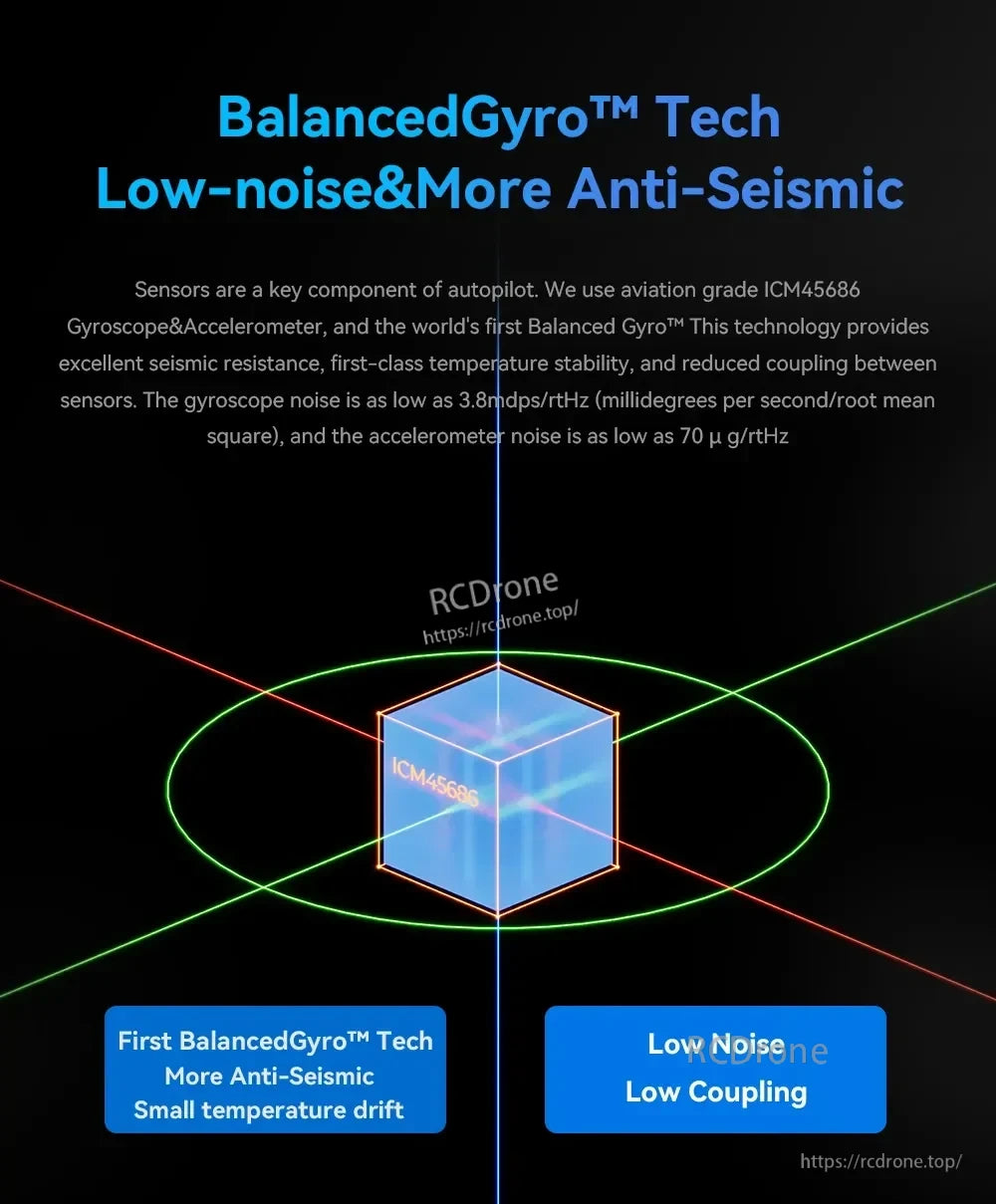
- Tecnologia BalancedGyro3 (ICM45686) com baixo ruído declarado e acoplamento reduzido entre sensores.
- Suporte de firmware: ArduPilot (PX4 em breve).
Para suporte de pedidos e questões de compatibilidade, entre em contato com o serviço de atendimento ao cliente em [email protected] or visite https://rcdrone.top/.
Especificações
| Item | Especificação |
|---|---|
| Padrão de hardware | FMU v6X |
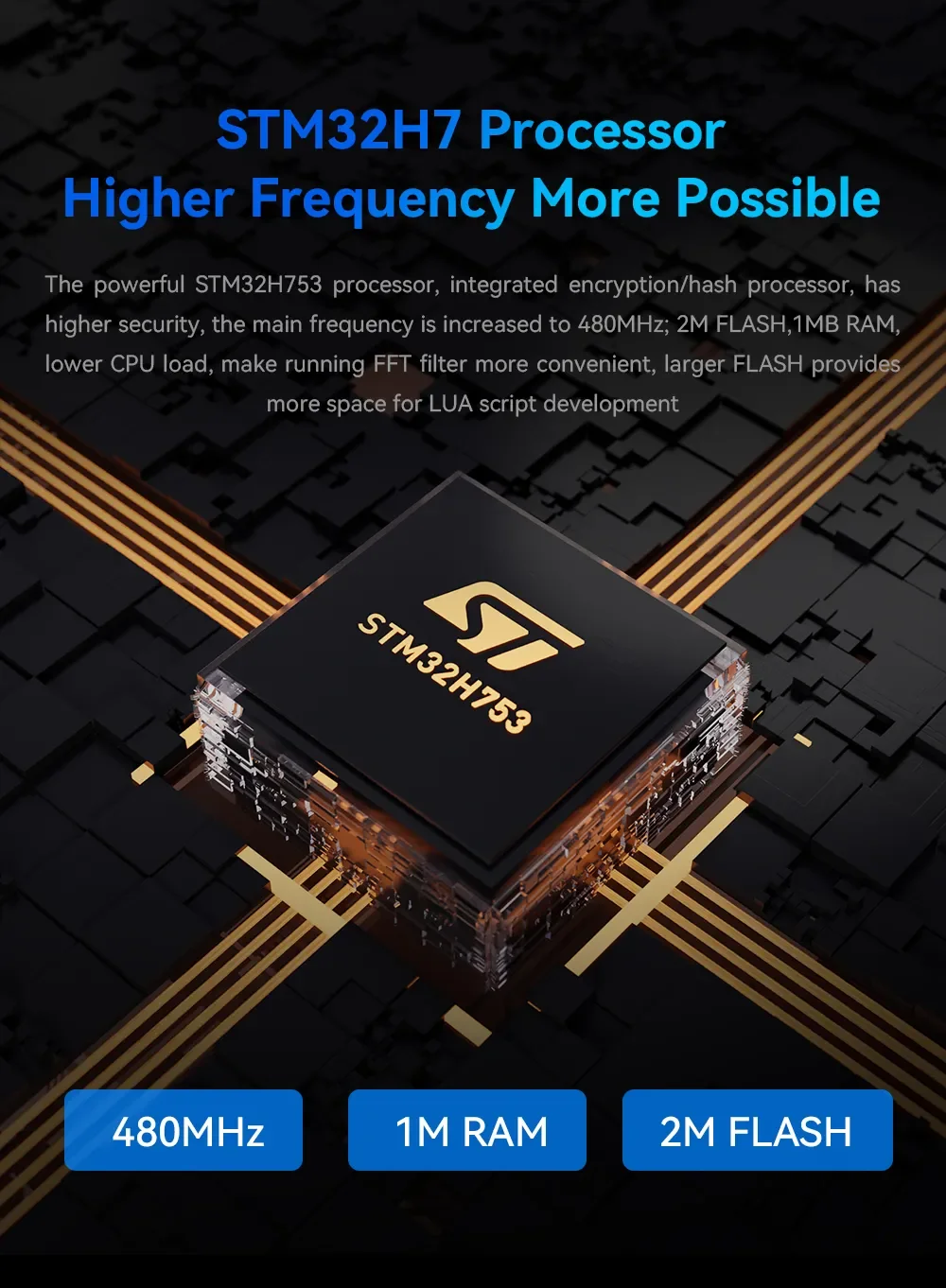
| MCU | STM32H753 |
| IO MCU | STM32F103 |
| Absorção de choque embutida | SIM |
| Acelerômetros &e giroscópios | ICM45686 + ICM45686 + BMI088 |
| Ruído do giroscópio BalancedGyro3 declarado | 3.8 mdps/rtHz |
| Ruído do acelerómetro BalancedGyro3 | 70 ug/rtHz |
| Barómetro | ICP-20100 x2 |
| Compasso | RM3100 |
| Relé PWM | SIM |
| Entrada de protocolo RC | SBUS + DSM + PPM |
| Quantidade PWM | 16 (14 portas DuPont + 2 portas de expansão GH1.25) |
| Comutação de tensão PWM | A comutação entre 3.3V e 5V é suportada |
| Interface de alimentação | 2 portas de alimentação DroneCAN |
| Monitorização de tensão do servo | 9.9 V |
| Detalhe da interface | CAN x2; GPS&Segurança x1; GPS2 x1; DSM PPM IN x1; ETH x1; UART 4 x1; SBUS IN x1; USB x1; SPI x1; AD&IO x1; I2C x1 |
| Temperatura de operação | -20 C ~ 85 C |
| Peso | 93 g |
| Tensão de operação | 4.5 V a 5.4 V |
| Suporte de firmware | ArduPilot (PX4 em breve) |
| Valores do desenho mecânico (unidade não especificada) | 38.8; 17.2; 13 |
Aplicações
- Construções e manutenção de drones multirotor
- Construções de drones VTOL que requerem um controlador de voo FMU v6X
- Substituição de um módulo de controlador de voo ZeroOne X6
Detalhes




Related Collections




