







Дрон P600 Научно-исследовательский Дрон - ROS AI Экспериментальное вторичное программирование Платформа промышленных разработок Студийный лабораторный дрон DIY Kit
Дрон P600 Научно-исследовательский Дрон - ROS AI Экспериментальное вторичное программирование Платформа промышленных разработок Студийный лабораторный дрон DIY Kit
RCDrone
Не удалось загрузить сведения о доступности самовывоза
Обзор
The Научно-исследовательский дрон P600 это передовая платформа, разработанная для научных исследований, промышленных разработок и экспериментов с ИИ. Оснащена высокопроизводительным Вычислительный модуль NVIDIA Jetson Orin NX, он доставляет 100 TOPS вычислительная мощность, что делает его идеальным для продвинутых приложений ИИ. Этот дрон имеет 40-кратный оптический зум карданная камера для получения изображений с высоким разрешением, 3D LiDAR SLAM для точного картирования и RTK-позиционирование для точности на уровне сантиметра. Его интегрированное программное обеспечение Prometheus V2 и Библиотека визуализации SpireCV поддержка вторичного программирования, что делает его универсальным инструментом для разработчиков. С временем полета до 21 минута, а диагональная ось 600 мм, и прочный 4,05 кг взлетный весP600 оптимизирован для динамичных сред исследований и разработок.
Технические характеристики
Самолеты
| Атрибут | Подробности |
|---|---|
| Тип самолета | Квадрокоптер |
| Взлетный вес | Около 4,05 кг (включая батарею) |
| Расстояние по диагональной оси | 600 мм |
| Размеры | Длина 469 мм, Ширина 469 мм, Высота 400 мм |
| Максимальное время зависания | Приблизительно 21 мин. |
| Точность зависания | RTK: ±0,015 м (по горизонтали), ±0,01 м (по вертикали) 3D LiDAR SLAM: ±0,2 м (по горизонтали), ±0,1 м (по вертикали) |
| Рабочая температура | 6°С ~ 40°С |
| Основной чип MCU | STM32H743VIT6 / 216 МГц / 2 Мб памяти программ / 512 КБ памяти данных |
| ИДУ | ICM20689 |
| Барометр | БМП388 |
| МТД | АТ24С64 |
| Интерфейсы ввода/вывода | Встроенный PX4IO-V2, поддерживает 8Интерфейсы ШИМ, 1Интерфейс RC (поддерживает SBus, PPM, DSM) Внешние интерфейсы: 3UART (GH1.25 6-контактный), 1CAN (GH1.25 4-контактный), USB-интерфейс управления полетом (Type-C) |
Бортовой компьютер
| Атрибут | Подробности |
|---|---|
| Имя | Бортовой компьютер Allspark-Orin NX |
| Модель | IA160_V1 |
| Масса | Около 188 г |
| Размеры | 102,5 мм × 62,5 мм × 31 мм (включая вентилятор) |
| Процессор | NVIDIA Jetson Орин NX |
| Память | 16 ГБ LPDDR5 |
| Вычислительная мощность | 100 ТОПОВ |
| ГПУ | Интегрированные 32 ядра Tensor в 1024-ядерном графическом процессоре NVIDIA Ampere |
| Процессор | 8-ядерный 64-битный процессор Arm® Cortex®-A78AE v8.2 (2 МБ L2 + 4 МБ L3) |
| SSD | 128 ГБ (М.2 интерфейса, расширяемый) |
| Ethernet | 100 Мбит/с x2 (1 выделенный порт Ethernet, 1 сменный) |
| Wi-Fi | 5G |
| Отображать | Микро HDMI (1920*1080P) |
| USB-порты | USB2.0: Тип A x1, Тип C x1 USB2.0: OTG-кабель x1 |
| Источник питания | 10~26В @ 3А |
Аккумуляторная батарея
| Атрибут | Подробности |
|---|---|
| Модель | LPB610HV |
| Емкость | 10000 мАч |
| Вес батареи | 1,2 кг |
| Рабочее напряжение | 22В~26,1В |
| Напряжение хранения | 23.1В |
| Размеры | Длина 180 мм, Ширина 90 мм, Высота 63 мм |
Пульт дистанционного управления
| Атрибут | Подробности |
|---|---|
| Модель | Н16 |
| Каналы | 16 |
| Частота | 2.400~2.483 ГГц |
| Рабочее напряжение | 4.2В |
| Аккумулятор | 20000 мАч |
| Порт зарядки | Тип-C 9V-2A |
| Масса | 1034 г |
| Размеры | Длина 272 мм, Ширина 183 мм, Высота 94 мм |
Связь Ссылка
| Атрибут | Подробности |
|---|---|
| Модель | Р16 |
| Расстояние связи | Около 600 метров, пропускная способность 3,5 Мбит/с |
| Рабочее напряжение | 7,2В~72В |
| Интерфейсы | 2УАПП, 1Ethernet, 1HDMI, 1Тип-С |
| Размеры | Длина 76 мм, Ширина 69 мм, Высота 11 мм |
Подвесная камера
| Атрибут | Подробности |
|---|---|
| Модель | GX40 |
| Размеры подвеса | Длина 85,8 мм, Ширина 86 мм, Высота 129,3 мм |
| Размеры ГКУ | Длина 45,4 мм, Ширина 40 мм, Высота 13,5 мм |
| Вес подвеса | 405 г |
| Вес ГКУ | 18,6 г |
| Рабочее напряжение | 14В~53В |
| Протокол потоковой передачи | RTSP (по умолчанию) |
| Формат кодировки | H.264/H.264H/H.264B/H.265/MJPEG |
| Разрешение | - 4K30 кадров в секунду - 1080P@30fps - СКГА (12801024)@30 кадров в секунду <br> - 1.3М (1280960)@30 кадров в секунду - 720P@30fps |
| Битрейт | 0,25–10 Мбит/с при H.265, 0,5–16 Мбит/с при H.264 |
Линза
| Атрибут | Подробности |
|---|---|
| Тип | Оптический зум-объектив |
| Фокусное расстояние | 4,8~48 мм |
| Диафрагма (F/NO) | f1.7~f3.2 |
| Диагональное поле зрения (D) | 67,2°~7,6° |
| Вертикальное поле зрения (V) | 36,1°~3,7° |
| Горизонтальное поле зрения (H) | 60,2°~6,6° |
| Коэффициент оптического увеличения | 10x |
Датчик изображения
| Атрибут | Подробности |
|---|---|
| Тип датчика | КМОП |
| Эффективные пиксели | 8.29M |
| Размер сенсора | 1/2.8'' |
| Размер пикселя | 1,45×1,45 (мкм) |
| Скорость электронного затвора | 1~1/30000с |
Осветитель
| Атрибут | Подробности |
|---|---|
| Тип | Лазер |
| Длина волны | 850±10 нм |
| Власть | 0,8 Вт |
| Расстояние освещения | ≤200 м |
РТК
| Атрибут | Подробности |
|---|---|
| Модель | М15-РТК |
| Масса | 90 г |
| Размеры | Длина 80 мм, Ширина 50 мм, Высота 20 мм |
| Поддерживаемые типы спутников | BDS/GPS/ГЛОНАСС/QZSS |
| Источник питания | 9~36 В (рекомендуется 12 В) |
| Разъем антенны | SMA-F |
| Функциональные порты | UARTx2, CANx1, USB2.0x1 |
Зарядное устройство
| Атрибут | Подробности |
|---|---|
| Модель | С1-XR |
| Входное напряжение переменного тока | 100~240В |
| Входное напряжение постоянного тока | 11~18В |
| Размеры | Длина 130 мм, Ширина 115 мм, Высота 61 мм |
| Масса | 380 г |
| Ток зарядки | 0.1А~10А |
| Поддерживаемые элементы аккумулятора | 1~6 ячеек |
3D-лидар
| Атрибут | Подробности |
|---|---|
| Модель | MID360 |
| Длина волны лазера | 905 нм |
| Диапазон обнаружения | 40 м (при отражательной способности 105%) |
| Поле зрения (FOV) | Горизонтально: 360°, Вертикально: -7°~52° |
| Минимальный диапазон | 0,1 м |
| Скорость облачности точек | 10 Гц (типично) |
| Точек в секунду | 200 000 очков/с |
| Интерфейс данных | 100 BASE-TX Ethernet |
| Синхронизация данных | IEEE 1588-2008 (PTP v2), GPS |
| Внутренний ИДУ | ICM40609 |
| Источник питания | 7~27В |
| Размеры | 65 мм (Ш) x 65 мм (Г) x 60 мм (В) |
| Масса | 115 г |
| Рабочая температура | -20°С ~ 55°С |
Параметры программного обеспечения
Бортовой компьютер
| Атрибут | Подробности |
|---|---|
| Модель | Джетсон Орин NX |
| Операционная система | Убунту 20.04 |
| Имя пользователя | амов |
| Пароль | амов |
| Версия L4T | 35.2.1 |
| Версия с реактивным ранцем | 5.1 |
| Версия CUDA | 11.4.315 |
| RealSense SDK | 2.50.0 |
| Версия ROS | ноэтический |
| Версия OpenCV | 4.7.0 |
| RealSense ROS | 2.3.2 |
Список пакетов
| Имя | Спецификация/Модель | Количество/единица |
|---|---|---|
| Основной самолет P600 | P600-Allpark2-RTK-GX40-S3 | 1 комплект |
| Заземляющий терминал M15-RTK | М15-РТК | 1 шт. |
| Грибовидная антенна GNSS | Грибовидная антенна | 1 шт. |
| Удлинительный кабель антенны GNSS | Удлинительный кабель антенны | 1 кабель |
| Пульт дистанционного управления H16 | Н16 | 1 шт. |
| Аккумулятор 6S 10000 мАч | 6S 10000мАч | 1 комплект |
| Литиевая батарея 3S 4000 мАч | 3S 4000 мАч | 1 комплект |
| Умное балансировочное зарядное устройство | С1-XR | 1 шт. |
| Сетевой кабель | 1,5 м | 1 кабель |
| Страховочный трос | 50 м | 1 упаковка |
| Кронштейн HDMI | / | 1 шт. |
| Кабель-адаптер HDMI | / | 1 шт. |
| Конфигурация компьютера | / | 1 шт. |
| 2D-пластина для сброса | 35×35 см | 1 шт. |
| Авиационный случай | 740×540×510 мм | 1 комплект |
| Комплект кабелей для аксессуаров | / | 1 упаковка |
| Сертификат | / | 1 лист |
| Контрольный список функциональных испытаний | / | 1 лист |
Подробности
Научно-исследовательская платформа для разработки дронов Prometheus 600
The Научно-исследовательская платформа для разработки дронов Prometheus 600 (называемый P600) — это продукт четвертого поколения в серии P600. Он глубоко интегрирует две основные технологии, Прометей и SpireCV, и оснащен 40-кратным оптическим зумом карданной камеры. Эта установка позволяет обнаруживать и отслеживать цели на большом расстоянии, выполнять автономную посадку с больших высот и выполнять воздушные крейсерские миссии.
Система поддерживает 3D LiDAR SLAM с Быстро-лио, достигая высокоточного 3D SLAM картирования. Кроме того, он имеет Алгоритм многоагентного взаимодействия EGO-Swarm, что позволяет применять его в различных сценариях, таких как трехмерная пространственная реконструкция внутри и вне помещений, а также обход препятствий во время навигации дронов.
Эти расширенные возможности дополняются Профессиональная наземная станция «Прометей», которая обеспечивает визуальную обратную связь в реальном времени, мониторинг работы и динамическую настройку параметров, что упрощает разработчикам освоение и ускоряет вторичную разработку.

Три версии дрона P600

Гибкое управление оптико-электронным подвесом
Подвесная камера GX40 поддерживает многосценарное управление и интегрирует цепное дистанционное управление для обеспечения поиска цели во время навигации по точкам. Использование Библиотека визуализации SpireCV, он облегчает обнаружение и отслеживание целей, обеспечивая фиксацию подвеса на цели в режиме реального времени.
- Ночное освещение
- Обнаружение и отслеживание целей

Целевой клик и отслеживание
Используя Алгоритм обнаружения YOLOv5 и используя универсальный набор данных COCO, цели обнаруживаются и отслеживаются. Алгоритм отслеживания Nanotrack фиксирует выбранные цели для отслеживания. Без изменения условий цели на расстоянии до 30 метров могут быть идентифицированы и отслежены. Через 40-кратный оптический зум и электронный зум, достигается обнаружение и отслеживание цели на большом расстоянии. Во время отслеживания дрона Профессиональная наземная станция «Прометей» позволяет осуществлять динамическое переключение отслеживания цели в зависимости от расстояния (по умолчанию 10 метров).
- Отслеживание на 30 м
- Отслеживание на 20 м
- Отслеживание на 10 м

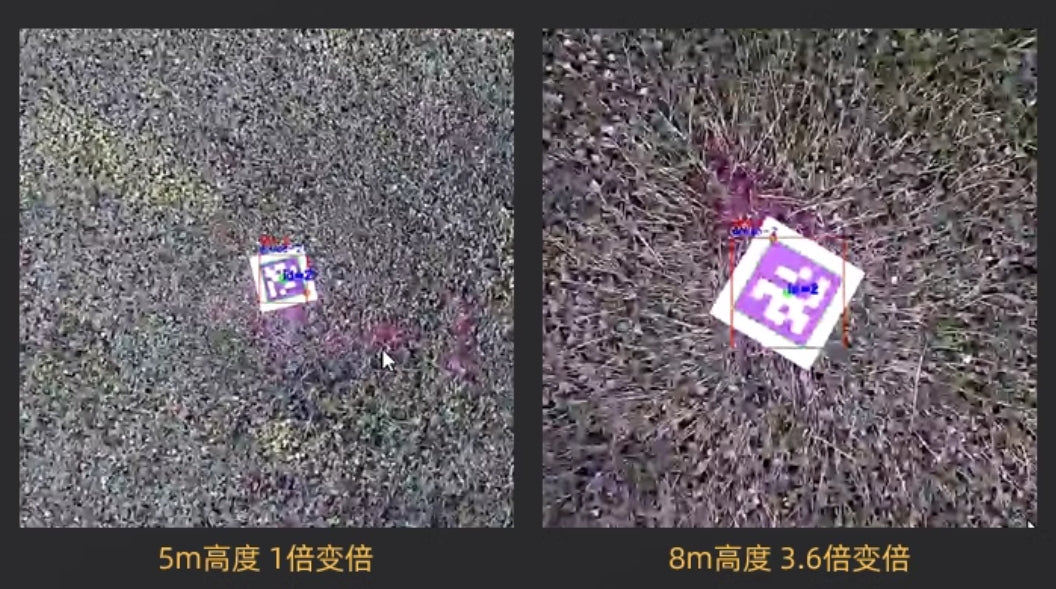
Посадка с помощью QR-кода
Используя Библиотека визуализации SpireCV, достигается точное обнаружение и оценка положения QR-кодов. GX40 может выполнять точную посадку на QR-коды с разных высот. Центр подвесной камеры совпадает с центром QR-кода с погрешностью 30 см.
- Высота 5 м, 1-кратное увеличение
- Высота 8 м, 3,6-кратный зум
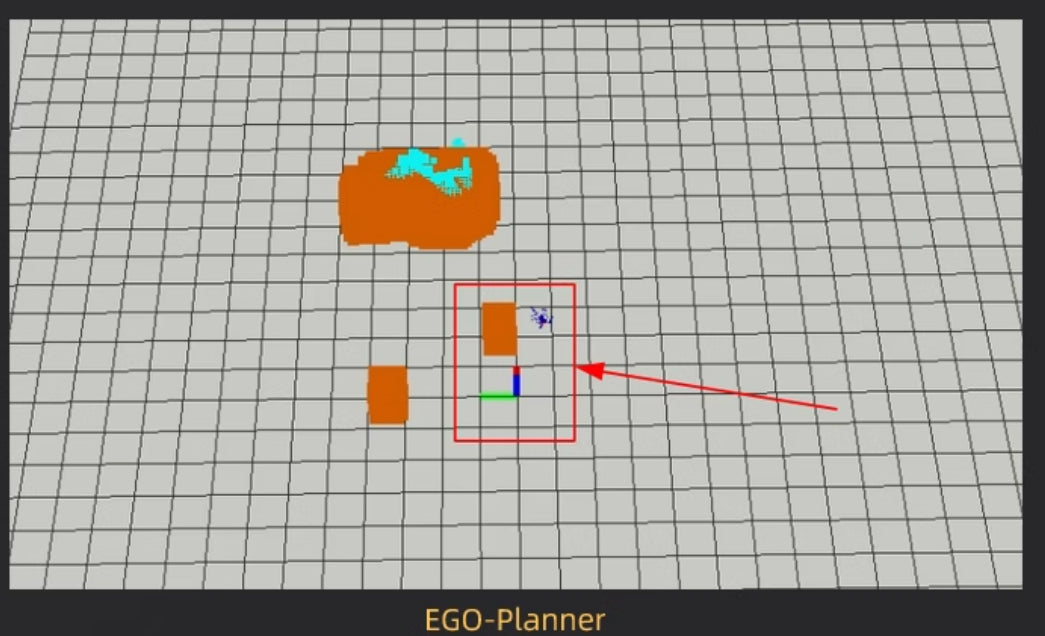
EGO-Планировщик
Поддерживает Алгоритм планирования пути EGO-Planner и обеспечивает Алгоритм картографирования OctomapВ сочетании с профессиональной наземной станцией он обеспечивает автономное трехмерное динамическое планирование пути.
Стабильные и надежные приложения для управления дронами
Дрон P600 оснащен высокоточным RTK-оборудованием, обеспечивающим высокоточное зависание на открытом воздухе с точностью по горизонтали до 1 см и точностью по вертикали до 1,5 см. В сочетании с Модуль управления системой программного обеспечения Prometheus, он обеспечивает точное управление дроном.
Модуль управления дроном действует как «мост» между программным обеспечением и дроном, обеспечивая несколько состояний управления, таких как зависание в исходном положении, зависание в текущем положении, посадка и движение. Они включают шесть режимов управления: привычное положение системы, скорость, интегрированное управление положением и скоростью и режим управления траекторией. Всего он предлагает семь режимов управления.

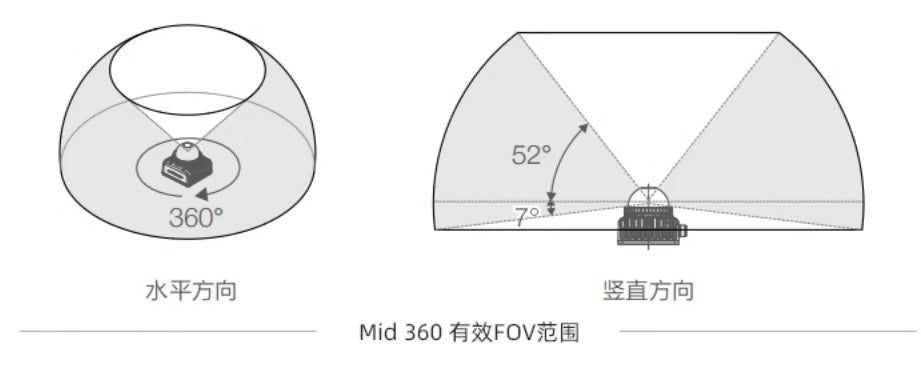
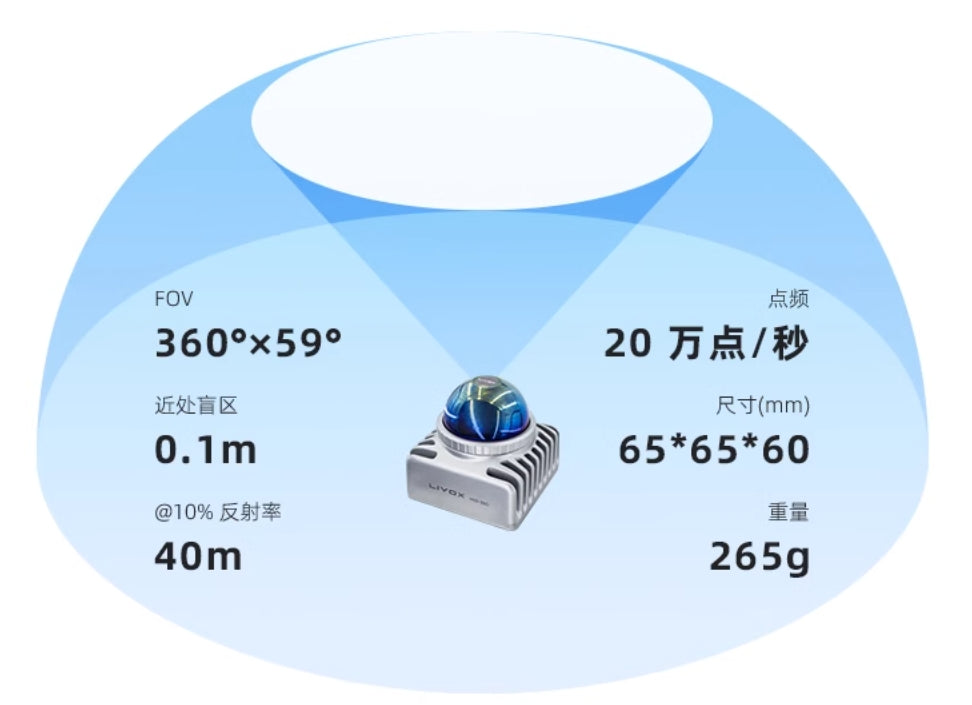
3D LiDAR Mid-360
- Низкая слепая зона | Широкий угол обзора | Многосценарное применение
The Середина 360 особенности 360° горизонтальное поле зрения и а максимальный вертикальный угол обзора 59°. При отражательной способности целевого объекта 10% максимальная дальность обнаружения может достигать 40 метров, а диапазон слепой зоны составляет всего лишь 10 метров. Он адаптируется к различным сложным условиям, таким как слабое и яркое освещение.
Оснащенный модулем Mid-360, Дрон P600 обеспечивает панорамный охват слепой зоны, гарантируя бесперебойную работу дронов в различных условиях.
- Описания диаграмм:
- Горизонтальное направление: 360°
- Вертикальное направление: максимальный угол обзора 52°

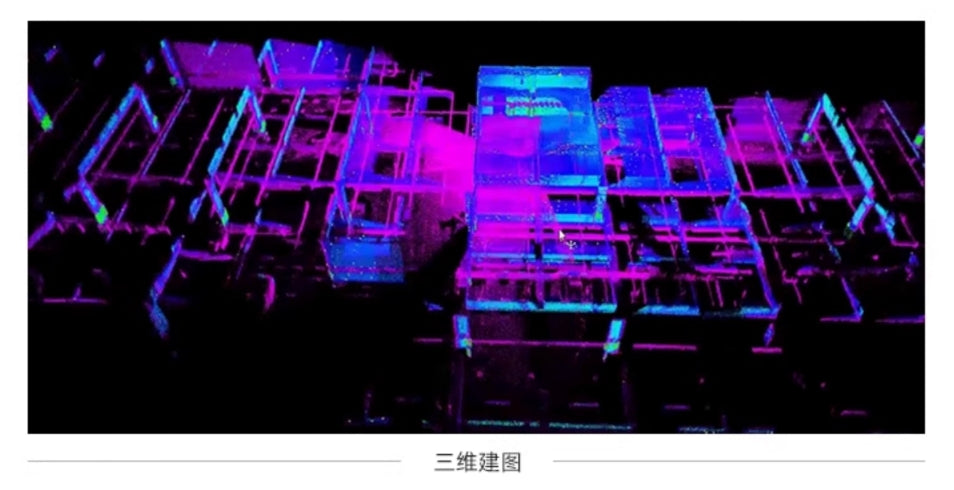
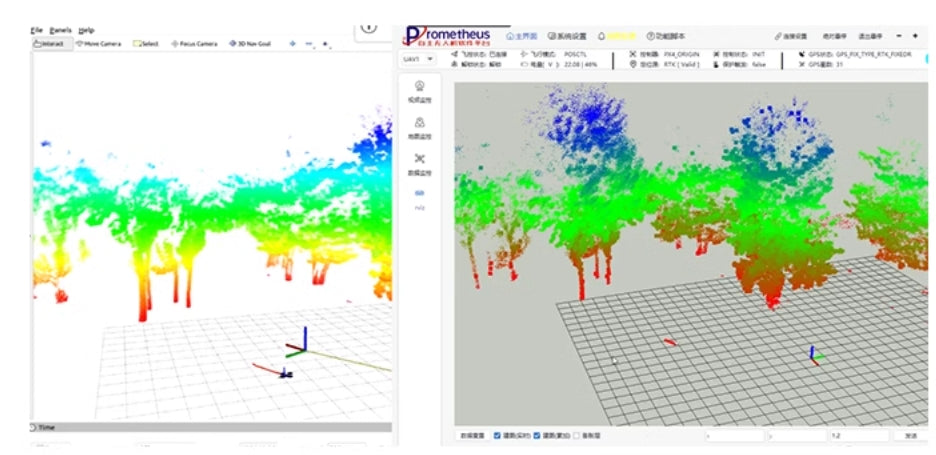
Быстрое и точное 3D-картирование окружающей среды
The Дрон P600 оснащен передовыми возможностями зондирования окружающей среды, что позволяет ему быстро собирать данные об окружающей среде во время полета. Эти данные обрабатываются в режиме реального времени для создания 3D экологическая карта, обеспечивая точное пространственное восприятие и навигационную поддержку для различных задач.
Планирование пути EGO-Swarm для навигации и избегания препятствий
The Середина360 публикует данные облака точек и данные о местоположении, объединенные с Алгоритм планирования пути EGO-Swarm, значительно повышая способность дрона автономно адаптироваться к динамическим изменениям окружающей среды. Он может анализировать и реагировать в режиме реального времени на препятствия во время движения и динамически корректировать цель отслеживания с максимальной скоростью 2 м/с. Это обеспечивает исключительную гибкость и адаптивность в неизвестных и сложных операционных сценариях.
Эта функция значительно повышает эффективность работы дрона, позволяя ему эффективно и точно выполнять различные задачи.
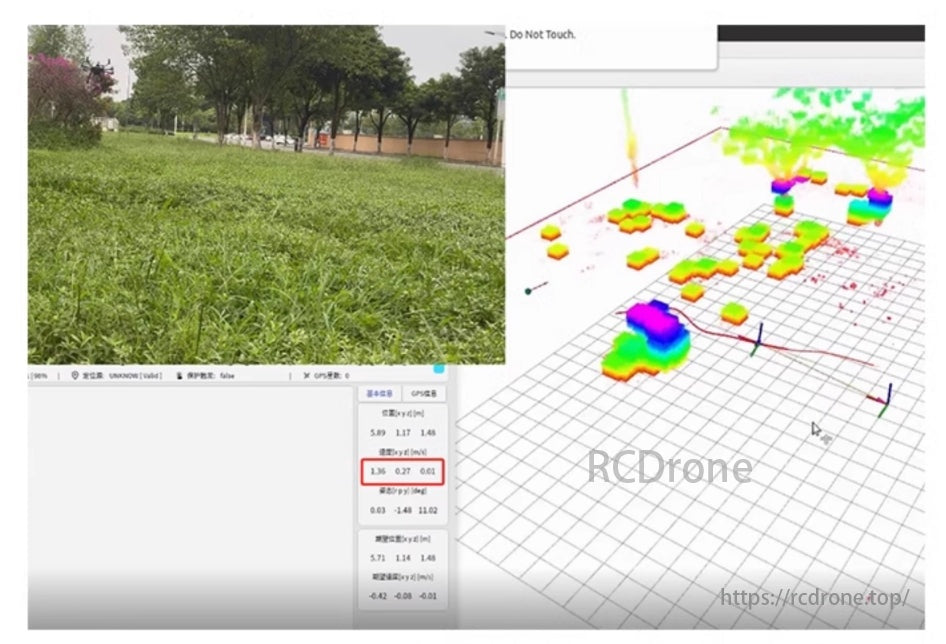
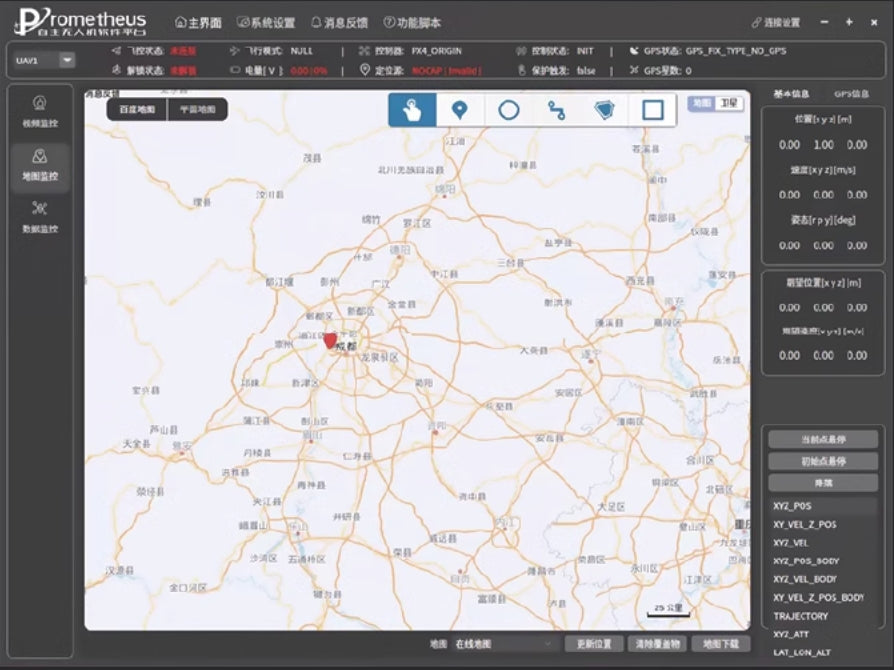
Профессиональная наземная станция Prometheus для взаимодействия с дроном
- Взаимодействие с наземной станцией
Это демонстрирует интерфейс и возможности взаимодействия Профессиональная наземная станция «Прометей», что обеспечивает бесперебойную связь и работу с дроном посредством трехмерного картирования окружающей среды.
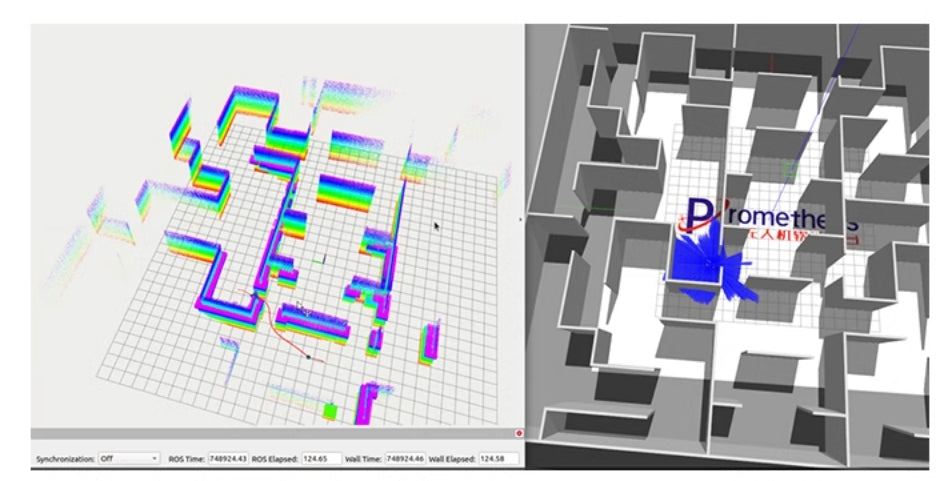
Демонстрация интегрированной функции моделирования
- Моделирование 3D LiDAR SLAM и планирование пути EGO-Swarm
Это иллюстрирует моделирование 3D LiDAR SLAM и Планирование пути EGO-Swarm в структурированной среде, демонстрируя возможности системы в контролируемой демонстрации.
Аппаратные характеристики
Рама дрона
The Кедуэй DP1000 Платформа промышленного беспилотника использует FOC (управление, ориентированное на поле) Система питания, позволяющая двигателю вращаться стабильно, с низким уровнем шума, высокой эффективностью и быстрым динамическим откликом. Вся система дрона достигает состояния «готовности к полету» с превосходным качеством оборудования, гарантируя стабильные летные характеристики. Она поддерживает сверхдлительная продолжительность полета (70 минут без полезной нагрузки), в то время как Дрон P600 требуется приблизительно 24 минуты для стабилизации во время позиционирования.

Мощный вычислительный блок
- Вычислительный блок Allspark Micro Edge, оборудованный Модуль NVIDIA Orin NX, предоставляя 100 TOPS вычислительной мощности с плавающей точкой.
- Компактный размер, малый вес, высокая совместимость с системами и Высокопроизводительные вычисления с ускорением на GPU.
- Предварительно установлены все среды разработки, готовы к использованию, что повышает эффективность вторичной разработки.
- Размеры: 102,5 мм × 62.5 мм × 31 мм

Интегрированный контроллер передачи изображения
Ан пульт дистанционного управления дроном промышленного класса объединение данных, изображений и управления в единое целое.
- Диапазон частот: 2,4–2,483 ГГц
- Максимальная дальность передачи: 30 км
- Качество изображения: 1080P
- Срок службы батареи: 8-15 часов непрерывной работы
Во время эксплуатации дрона пользователи могут отслеживать информацию о нем в режиме реального времени, просматривать отснятый материал с камеры и одновременно управлять дроном с помощью джойстика, обеспечивая полную визуализацию полета.

Высокоточный RTK с двумя антеннами
Дрон оснащен Модуль позиционирования RTK-GNSS, который использует технологию быстрого дифференциального позиционирования фазы несущей и алгоритмы подавления многолучевого распространения для обеспечения точности позиционирования на уровне сантиметра для дронов. Он может одновременно получать данные RTCM с нескольких наземных опорных станций, поддерживая вычисления RTK с короткой, средней и длинной базой.
Со встроенным многоязычным Веб-интерфейс, он обеспечивает конфигурацию с нулевым порогом и визуализированные процессы отображения и обновления данных. Приемник также имеет удобный интерфейс конфигурации веб-страницы, что значительно снижает эксплуатационный барьер. Он предлагает богатые интерфейсы и адаптируется к различным сценариям применения, обеспечивая исключительную производительность при точном позиционировании.

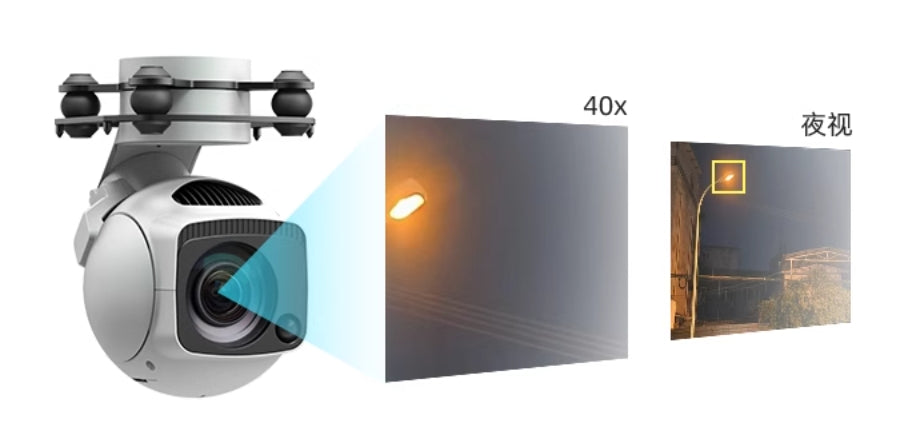
Оптико-электронный подвес 40x
Оснащенный высокоточным 3-осевым неортогональным карданным подвесом, он оснащен 8,29-мегапиксельной камерой с 10-кратным оптическим зумом в сочетании с технологией цифрового зума, что позволяет достичь 40-кратного увеличения. Он может выводить 4K@30FPS video транслирует по сети. Кроме того, он оснащен модулем лазерной подсветки, что позволяет получать четкие изображения даже в полной темноте.
MID 360 3D LiDAR
Mid-360 — это экономичный, безопасный и надежный лазерный датчик обнаружения и определения дальности. Он широко используется в таких областях, как логистические роботы, промышленные роботы и умные города, поддерживая такие функции, как картографирование, позиционирование, идентификация и обход препятствий. Mid-360 может обнаруживать объекты на расстоянии от 0,1 метра и до 100 метров. Он отличается компактным размером, широким полем зрения, высоким разрешением, высокой надежностью и встроенным IMU.
Технические характеристики:
- Поле зрения: 360° × 59°
- Минимальное расстояние обнаружения: 0,1 м
- Диапазон (при 10% отражательной способности): 40 м
- Частота точек: 200 000 точек/секунду
- Размеры (мм): 65 × 65 × 60
- Масса: 265 г
Возможности программного обеспечения
Программная система Prometheus V2
Платформа разработки основана на ROS и фреймворке с открытым исходным кодом Prometheus, предлагая богатые функциональные возможности и большое количество вторичных интерфейсов разработки для эффективной настройки. Она предоставляет интерфейсы для данных состояния и датчиков БПЛА, включая информацию о местоположении, режимах полета, состоянии батареи и IMU. Кроме того, она предлагает интерфейсы управления для положения, скорости, ускорения и ориентации, а также примеры программ для использования интерфейса разработки. БПЛА также включает встроенные функции проверки безопасности полета (не избегания препятствий), что позволяет автоматически приземляться в нештатных ситуациях для снижения риска столкновений, делая разработку более безопасной.

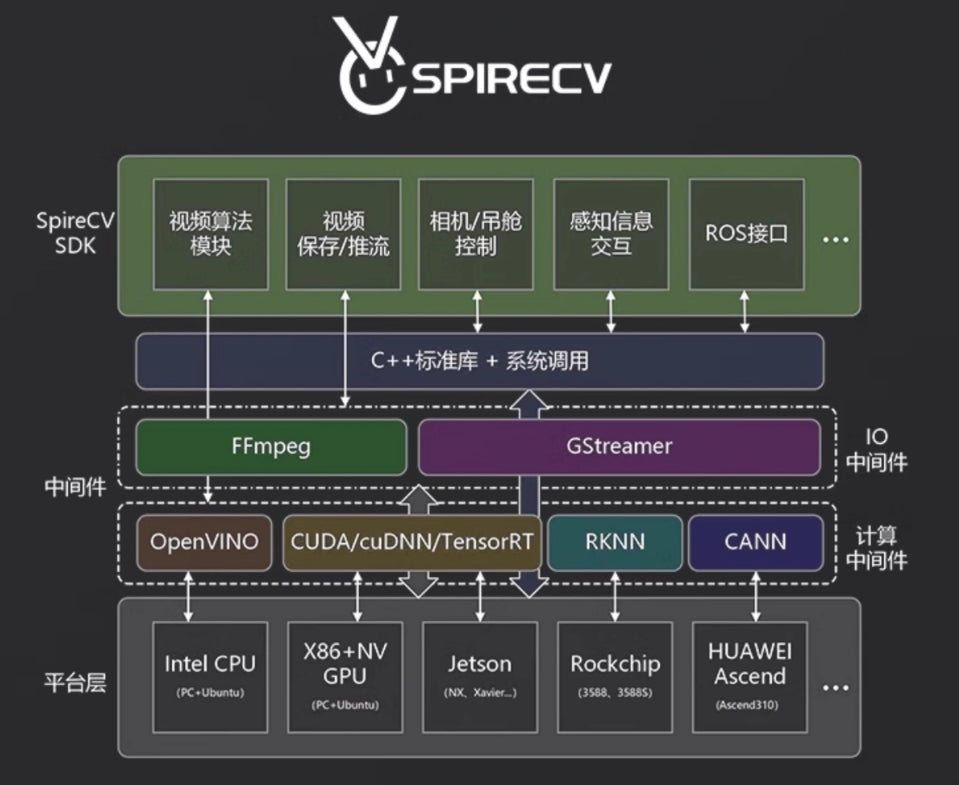
Библиотека SpireCV Vision
Основанный на библиотеке SpireCV vision, это встроенный SDK обработки изображений в реальном времени, разработанный специально для интеллектуальных беспилотных систем. Его основные функции включают управление подвесом/камерой, хранение видео, потоковую передачу, обнаружение, распознавание и отслеживание целей. Он направлен на предоставление разработчикам интеллектуальных беспилотных систем высокопроизводительных, высоконадежных, простых и многофункциональных возможностей обработки зрения. Эта модель поддерживает обучение YOLO для функции отслеживания транспортных средств point-and-click.
Система наземной станции «Прометей»
Наземная станция Prometheus — это интерфейс человек-машина, разработанный с использованием Qt на основе системы Prometheus. Он использует связь TCP/UDP для упрощения настройки многомашинной связи. Наземная станция позволяет пользователям быстро воспроизводить различные функции системы Prometheus, обеспечивая мониторинг состояния БПЛА в реальном времени, а также такие функции, как взлет, посадка и управление положением одним щелчком мыши.
Приложения
-
Научные исследования и разработки ИИ
- Тестирование алгоритмов ИИ
- Расширенный анализ данных датчиков
- Обработка и отслеживание изображений в реальном времени
-
Промышленное применение
- Точное картографирование и навигация в сложных условиях
- Обнаружение и обход препятствий в логистике и складировании
- Проверка инфраструктуры, такой как линии электропередач и трубопроводы
-
Академическое и образовательное использование
- Вторичное программирование для исследований ИИ на основе ROS
- Лабораторные демонстрации и эксперименты
- Обучение автономной навигации дронов
-
Решения для умного города
- 3D пространственная реконструкция для городского планирования
- Мониторинг и управление трафиком
- Наблюдение и анализ окружающей среды
-
Разработка на заказ
- Прототипирование для специализированных промышленных применений
- Тестирование и интеграция новых аппаратных и программных компонентов
-
Реагирование на стихийные бедствия и мониторинг окружающей среды
- Воздушный осмотр и мониторинг в районах, пострадавших от стихийных бедствий
- Сбор данных об окружающей среде для исследований и разработки политики
P600 обеспечивает непревзойденную гибкость и функциональность, позволяя исследователям, инженерам и разработчикам выполнять сложные проекты в самых разных сценариях.
Related Collections







