







P600 Drone Scientific Research Drone - ROS AI Experimental Secondary Programming Industrial Development Platform Studio Lab Drone DIY Kit
P600 Drone Scientific Research Drone - ROS AI Experimental Secondary Programming Industrial Development Platform Studio Lab Drone DIY Kit
RCDrone
Не вдалося завантажити інформацію про можливість самовивозу
Огляд
The Науково-дослідний дрон P600 це передова платформа, розроблена для наукових досліджень, промислового розвитку та експериментів зі штучним інтелектом. Оснащений високою продуктивністю Обчислювальний модуль NVIDIA Jetson Orin NX, це забезпечує 100 TOPS обчислювальної потужності, що робить його ідеальним для розширених програм ШІ. Цей дрон має a 40-кратний оптичний зум карданна камера для зображення високої роздільної здатності, 3D LIDAR SLAM для точного відображення та RTK позиціонування для сантиметрової точності. Його інтегроване програмне забезпечення Prometheus V2 і Бібліотека зору SpireCV підтримує вторинне програмування, що робить його універсальним інструментом для розробників. З часом польоту до 21 хвилина, а Діагональна вісь 600 мм, і міцний Злітна маса 4,05 кг, P600 оптимізовано для динамічних досліджень і розробок.
Технічні характеристики
Літак
| Атрибут | Подробиці |
|---|---|
| Тип літака | Квадрокоптер |
| Злітна вага | прибл. 4,05 кг (з акумулятором) |
| Відстань по діагональній осі | 600 мм |
| Розміри | Довжина 469 мм, ширина 469 мм, висота 400 мм |
| Максимальний час наведення | прибл. 21 хв |
| Точність наведення | RTK: ±0,015 м (по горизонталі), ±0,01 м (по вертикалі) 3D LiDAR SLAM: ±0,2 м (по горизонталі), ±0,1 м (по вертикалі) |
| Робоча температура | 6°C ~ 40°C |
| Основний чіп MCU | STM32H743VIT6 / 216 МГц / 2 МБ пам'яті програм / 512 КБ пам'яті даних |
| ІДУ | ICM20689 |
| Барометр | BMP388 |
| MTD | AT24C64 |
| Інтерфейси введення/виведення | Вбудований PX4IO-V2, підтримує 8Інтерфейси ШІМ, 1Інтерфейс RC (підтримує SBus, PPM, DSM) Зовнішні інтерфейси: 3UART (6-контактний GH1.25), 1CAN (GH1.25 4-контактний), USB-інтерфейс керування польотом (тип C) |
Бортовий комп'ютер
| Атрибут | Подробиці |
|---|---|
| Ім'я | Бортовий комп'ютер Allspark-Orin NX |
| Модель | IA160_V1 |
| вага | прибл. 188 г |
| Розміри | 102,5 мм × 62,5 мм × 31 мм (включаючи вентилятор) |
| Процесор | NVIDIA Jetson Orin NX |
| Пам'ять | 16 ГБ LPDDR5 |
| Обчислювальна потужність | 100 ТОПів |
| GPU | Інтегровані 32 тензорних ядра 1024-ядерного графічного процесора з архітектурою NVIDIA Ampere |
| ЦП | 8-ядерний 64-розрядний процесор Arm® Cortex®-A78AE v8.2 (2 МБ L2 + 4 МБ L3) |
| SSD | 128 ГБ (M.2 інтерфейсу, з можливістю розширення) |
| Ethernet | 100 Мбіт/с x2 (1 виділений порт Ethernet, 1 змінний) |
| WiFi | 5G |
| Дисплей | Micro HDMI (1920*1080P) |
| Порти USB | USB2.0: Type-A x1, Type-C x1 USB2.0: OTG x1 |
| Джерело живлення | 10~26В при 3А |
Акумулятор живлення
| Атрибут | Подробиці |
|---|---|
| Модель | LPB610HV |
| Ємність | 10000 мАг |
| Вага батареї | 1,2 кг |
| Робоча напруга | 22В~26,1В |
| Напруга зберігання | 23,1 В |
| Розміри | Довжина 180 мм, ширина 90 мм, висота 63 мм |
Пульт дистанційного керування
| Атрибут | Подробиці |
|---|---|
| Модель | H16 |
| Канали | 16 |
| Частота | 2,400~2,483 ГГц |
| Робоча напруга | 4,2 В |
| Акумулятор | 20000 мАг |
| Порт зарядки | Тип-C 9V-2A |
| вага | 1034 г |
| Розміри | Довжина 272 мм, ширина 183 мм, висота 94 мм |
Комунікаційний канал
| Атрибут | Подробиці |
|---|---|
| Модель | R16 |
| Відстань зв'язку | прибл. 600 метрів, пропускна здатність 3,5 Мбіт/с |
| Робоча напруга | 7,2 В~72 В |
| Інтерфейси | 2УАРТ, 1Ethernet, 1HDMI, 1Тип-C |
| Розміри | Довжина 76 мм, ширина 69 мм, висота 11 мм |
Карданна камера
| Атрибут | Подробиці |
|---|---|
| Модель | GX40 |
| Розміри кардана | Довжина 85,8 мм, ширина 86 мм, висота 129,3 мм |
| Розміри GCU | Довжина 45,4 мм, ширина 40 мм, висота 13,5 мм |
| Вага кардана | 405 г |
| Вага GCU | 18,6 г |
| Робоча напруга | 14В~53В |
| Протокол потокової передачі | RTSP (за замовчуванням) |
| Формат кодування | H.264 / H.264H / H.264B / H.265 / MJPEG |
| резолюція | - 4K30fps - 1080P@30fps - SCGA (12801024)@30fps <br> - 1.3M (1280960) @ 30 кадрів в секунду - 720P@30fps |
| Бітрейт | 0,25 Мбіт/с ~ 10 Мбіт/с @ H.265, 0,5 Мбіт/с ~ 16 Мбіт/с @ H.264 |
Об'єктив
| Атрибут | Подробиці |
|---|---|
| Тип | Об'єктив з оптичним збільшенням |
| Фокусна відстань | 4,8~48 мм |
| Діафрагма (F/NO) | f1,7~f3,2 |
| Діагональний кут огляду (D) | 67,2°~7,6° |
| Вертикальний кут огляду (V) | 36,1°~3,7° |
| Горизонтальний кут огляду (H) | 60,2°~6,6° |
| Коефіцієнт оптичного масштабування | 10x |
Датчик зображення
| Атрибут | Подробиці |
|---|---|
| Тип датчика | CMOS |
| Ефективні пікселі | 8,29 млн |
| Розмір датчика | 1/2,8" |
| Розмір пікселя | 1,45×1,45 (мкм) |
| Електронна швидкість затвора | 1~1/30000 с |
Освітлювач
| Атрибут | Подробиці |
|---|---|
| Тип | Лазерна |
| Довжина хвилі | 850±10 нм |
| потужність | 0,8 Вт |
| Відстань освітлення | ≤200 м |
RTK
| Атрибут | Подробиці |
|---|---|
| Модель | М15-РТК |
| вага | 90 г |
| Розміри | Довжина 80 мм, ширина 50 мм, висота 20 мм |
| Підтримувані типи супутників | BDS/GPS/ГЛОНАСС/QZSS |
| Джерело живлення | 9~36 В (рекомендується 12 В) |
| Роз'єм антени | СМА-Ф |
| Функціональні порти | UARTx2, CANx1, USB2.0x1 |
Зарядний пристрій
| Атрибут | Подробиці |
|---|---|
| Модель | C1-XR |
| Вхідна напруга змінного струму | 100~240В |
| Вхідна напруга постійного струму | 11~18В |
| Розміри | Довжина 130 мм, Ширина 115 мм, Висота 61 мм |
| вага | 380 г |
| Струм зарядки | 0.1A~10A |
| Підтримувані елементи батареї | 1~6 клітин |
3D ЛіДАР
| Атрибут | Подробиці |
|---|---|
| Модель | MID360 |
| Довжина хвилі лазера | 905 нм |
| Дальність виявлення | 40 м (при коефіцієнті відбиття 105%) |
| Поле зору (FOV) | По горизонталі: 360°, по вертикалі: -7°~52° |
| Мінімальний діапазон | 0,1 м |
| Швидкість хмарності точок | 10 Гц (типова) |
| Очок за секунду | 200 000 точок/с |
| Інтерфейс даних | 100 BASE-TX Ethernet |
| Синхронізація даних | IEEE 1588-2008 (PTP v2), GPS |
| Внутрішній IMU | ICM40609 |
| Джерело живлення | 7~27В |
| Розміри | 65 мм (Ш) x 65 мм (Г) x 60 мм (В) |
| вага | 115 г |
| Робоча температура | -20°C ~ 55°C |
Параметри програмного забезпечення
Бортовий комп'ютер
| Атрибут | Подробиці |
|---|---|
| Модель | Джетсон Орін NX |
| Операційна система | Ubuntu 20.04 |
| Ім'я користувача | амов |
| Пароль | амов |
| Версія L4T | 35.2.1 |
| Версія Jetpack | 5.1 |
| Версія CUDA | 11.4.315 |
| Realsense SDK | 2.50.0 |
| Версія ROS | ноетичний |
| Версія OpenCV | 4.7.0 |
| Realsense ROS | 2.3.2 |
Список пакетів
| Ім'я | Специфікація/модель | Кількість/Одиниця |
|---|---|---|
| Основний літак P600 | P600-Allpark2-RTK-GX40-S3 | 1 комплект |
| Наземний термінал M15-RTK | М15-РТК | 1 шт |
| Грибовидна антена GNSS | Грибна антена | 1 шт |
| Подовжувач GNSS антени | Кабель-подовжувач антени | 1 кабель |
| Пульт дистанційного керування H16 | H16 | 1 одиниця |
| Акумулятор 6S 10000mAh | 6S 10000mAh | 1 комплект |
| Літієва батарея 3S 4000mAh | 3S 4000mAh | 1 комплект |
| Розумний зарядний пристрій з балансуванням | C1-XR | 1 одиниця |
| Мережевий кабель | 1,5 м | 1 кабель |
| Страхувальна мотузка | 50 м | 1 упаковка |
| Кронштейн HDMI | / | 1 шт |
| Перехідний кабель HDMI | / | 1 шт |
| Конфігурація комп'ютера | / | 1 шт |
| 2D скидання пластини | 35×35 см | 1 шт |
| Авіаційна справа | 740×540×510 мм | 1 комплект |
| Набір кабелів аксесуарів | / | 1 упаковка |
| Сертифікат | / | 1 аркуш |
| Перелік перевірок функцій | / | 1 аркуш |
Подробиці
Платформа розробки науково-дослідницького безпілотника Prometheus 600
The Платформа розробки науково-дослідницького безпілотника Prometheus 600 (іменується як P600) є продуктом четвертого покоління в серії P600. Він глибоко інтегрує дві основні технології, Прометей і SpireCVі оснащений камерою з 40-кратним оптичним збільшенням. Ця установка дозволяє виявляти та супроводжувати цілі на великій відстані, здійснювати автономну посадку з великих висот і виконувати повітряні крейсерські місії.
Система підтримує 3D LiDAR SLAM з Швидко-ліо, досягаючи високоточного 3D-картографування SLAM. Крім того, він містить Мультиагентний алгоритм співпраці EGO-Swarm, дозволяючи застосовувати різні сценарії, наприклад тривимірну реконструкцію простору в приміщенні та на відкритому повітрі та уникнення перешкод під час навігації дроном.
Ці розширені можливості доповнюються Професійна наземна станція Prometheus, який забезпечує візуальний зворотний зв’язок у режимі реального часу, моніторинг роботи та динамічне налаштування параметрів, що полегшує розробникам освоєння та прискорення вторинної розробки.

Три версії дрона P600

Гнучке керування оптико-електронним підвісом
Карданна камера GX40 підтримує керування кількома сценаріями та інтегрує дистанційне керування на основі ланцюга, щоб увімкнути пошук цілі під час навігації за маршрутними точками. Використовуючи Бібліотека зору SpireCV, це полегшує виявлення та відстеження цілей, досягаючи фіксації карданного підвісу на ціль у реальному часі.
- Нічне освітлення
- Виявлення та супроводження цілей

Цільовий клік і відстеження
Використовуючи Алгоритм виявлення YOLOv5 і використовуючи універсальний набір даних COCO, цілі виявляються та відстежуються. The Алгоритм відстеження нанотреків блокує вибрані цілі для відстеження. Без зміни умов можна ідентифікувати та відслідковувати цілі на відстані до 30 метрів. Через 40-кратний оптичний і електронний зум, досягається виявлення та супроводження цілей на великій відстані. Під час відстеження безпілотників, Професійна наземна станція Prometheus дозволяє використовувати динамічні перемикачі відстеження цілі на основі відстані (за замовчуванням 10 метрів).
- Відстеження на 30м
- Стеження на 20м
- Відстеження на 10м

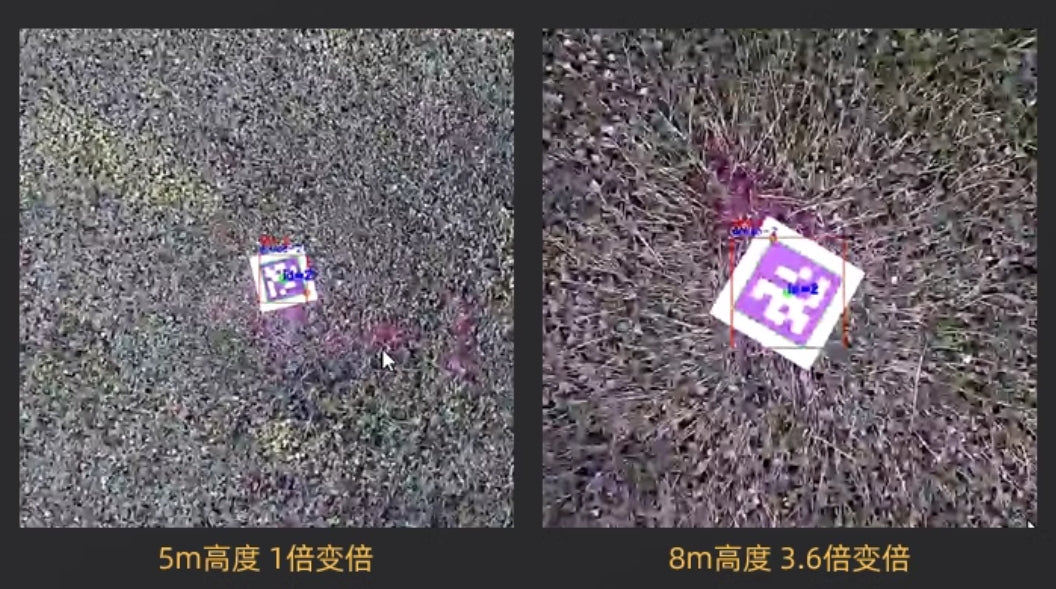
Посадка з наведенням QR-коду
Використовуючи Бібліотека зору SpireCV, досягається точне виявлення та оцінка положення QR-кодів. GX40 може здійснювати точну посадку за QR-кодами з різних висот. Центр камери підвісу збігається з центром QR-коду з похибкою 30 см.
- Висота 5 м, 1-кратне збільшення
- Висота 8 м, 3,6-кратне збільшення
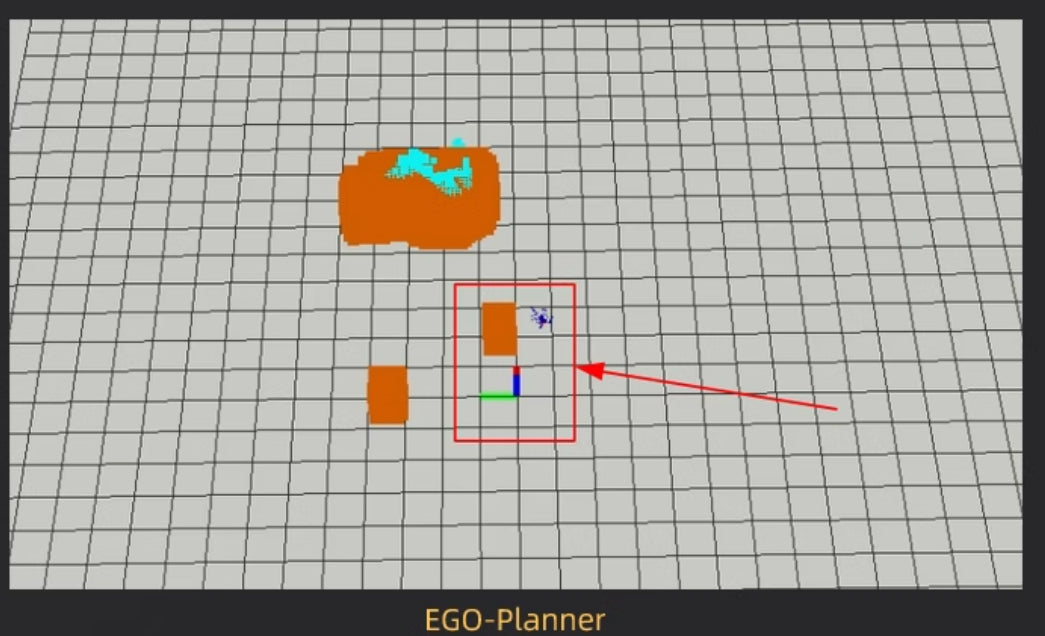
ЕГО-Планувальник
Підтримує Алгоритм планування шляху EGO-Planner і забезпечує Алгоритм відображення Octomap. У поєднанні з професійною наземною станцією він забезпечує автономне тривимірне динамічне планування шляху.
Стабільні та надійні програми для керування безпілотниками
Дрон P600 оснащений високоточним обладнанням RTK, що забезпечує високу точність зависання на відкритому повітрі з горизонтальною точністю до 1 см і вертикальною точністю до 1,5 см. У поєднанні з Модуль керування програмною системою Prometheus, це забезпечує точне керування дроном.
Модуль керування дроном діє як «міст» між програмним забезпеченням і дроном, забезпечуючи кілька станів керування, таких як початкове положення, поточне положення, приземлення та рух. Вони включають шість режимів керування: звичне положення системи, швидкість, інтегрований контроль положення та швидкості та режим керування траєкторією. Всього він пропонує сім режимів управління.

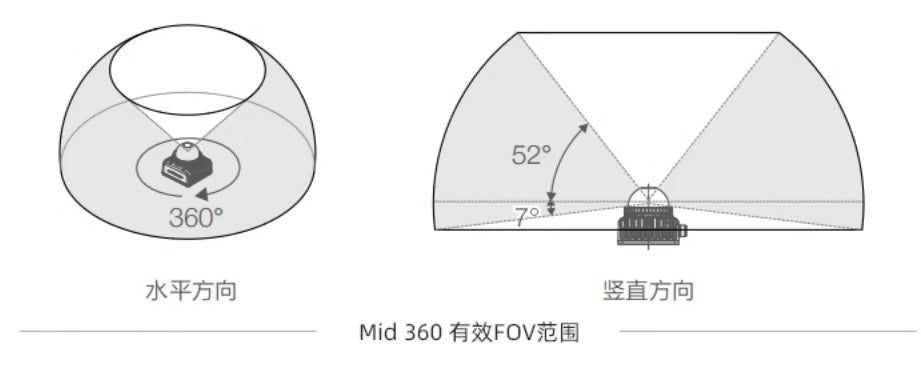
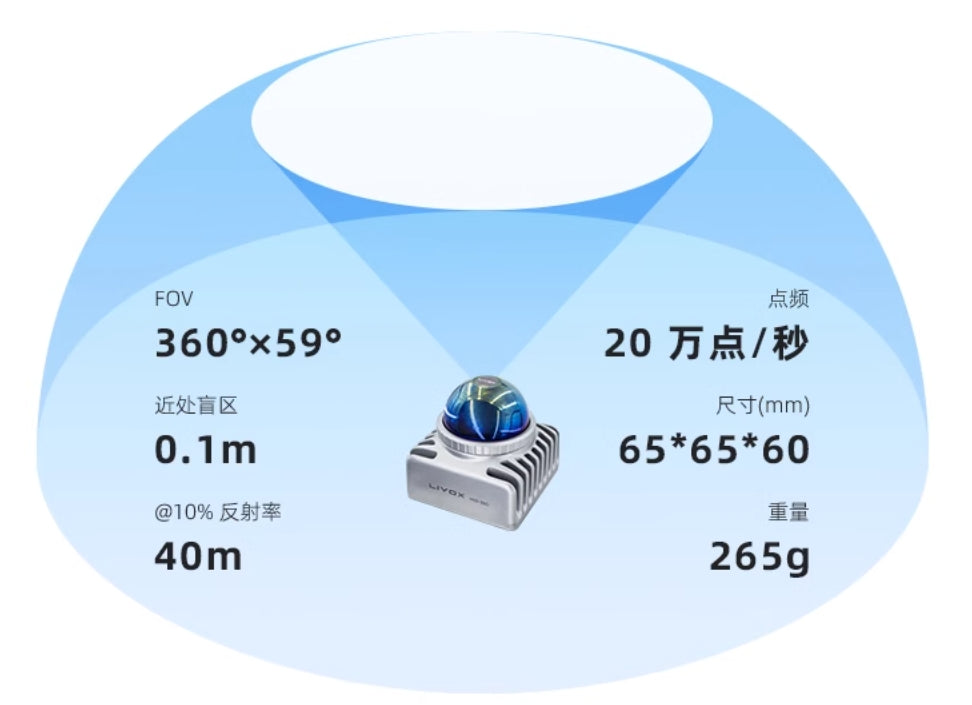
3D LiDAR Mid-360
- Низька сліпа зона | Широке поле зору | Багатосценарна програма
The Середина 360 особливості a 360° горизонтальне поле зору і а максимальний вертикальний кут зору 59°. Коли коефіцієнт відбиття цільового об'єкта становить 10%, можна досягти максимального діапазону виявлення 40 метрів, а діапазон сліпої зони невеликий 10 метрів. Він адаптується до різних складних середовищ, таких як слабке та сильне освітлення.
Оснащений модулем Mid-360 Дрон P600 забезпечує панорамне покриття сліпої зони, забезпечуючи безперебійну роботу дронів у різних сценаріях.
- Опис схем:
- Горизонтальний напрямок: 360°
- Вертикальний напрямок: максимальний кут огляду 52°

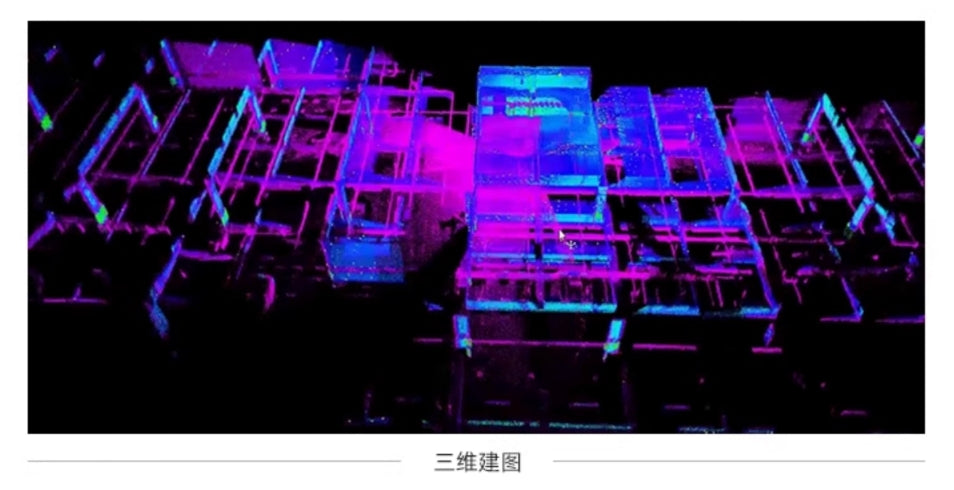
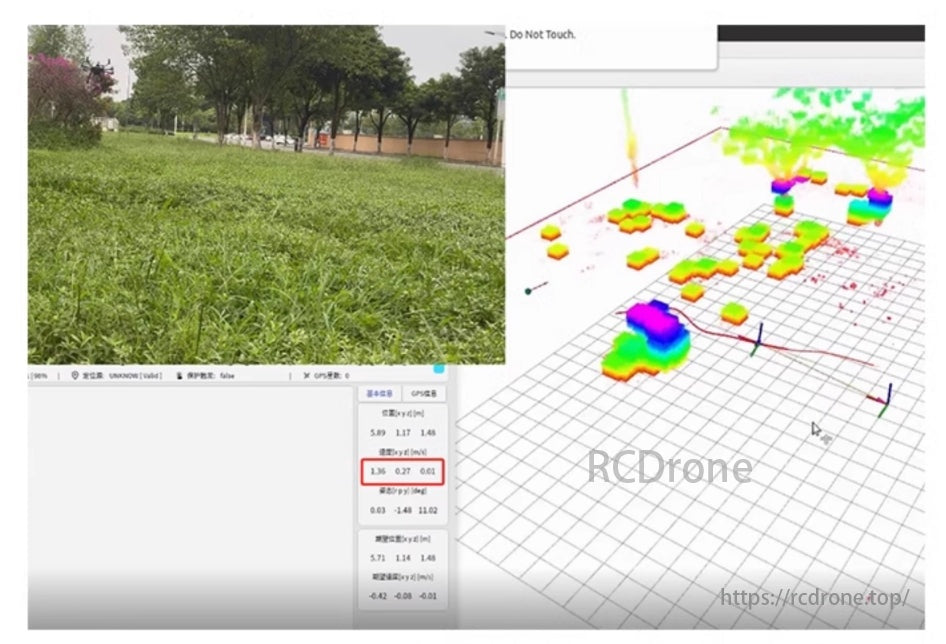
Швидке й точне 3D-картографування навколишнього середовища
The Дрон P600 оснащений розширеними можливостями зондування навколишнього середовища, що дозволяє йому швидко збирати дані про навколишнє середовище під час польоту. Ці дані обробляються в режимі реального часу для створення a 3D екологічна карта, забезпечуючи точне просторове усвідомлення та підтримку навігації для різних завдань.
Планування шляху EGO-Swarm для навігації та уникнення перешкод
The Середина 360 публікує дані хмари точок і дані про місцезнаходження в поєднанні з Алгоритм планування шляху EGO-Swarm, значно підвищуючи здатність дрона автономно адаптуватися до динамічних змін середовища. Він може аналізувати та реагувати в режимі реального часу на перешкоди під час руху та динамічно коригувати ціль супроводу з максимальною швидкістю 2 м/с. Це забезпечує виняткову гнучкість і адаптивність у невідомих і складних операційних сценаріях.
Ця функція значно підвищує ефективність дрона, дозволяючи йому ефективно й точно виконувати різноманітні завдання.
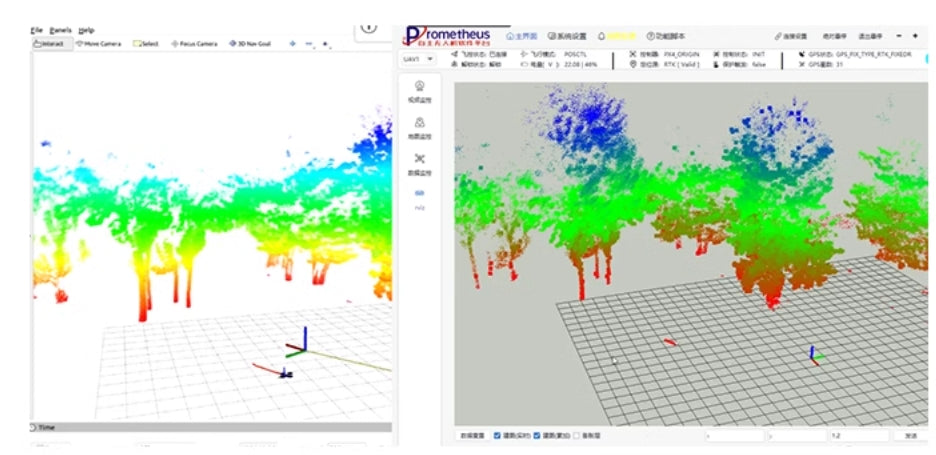
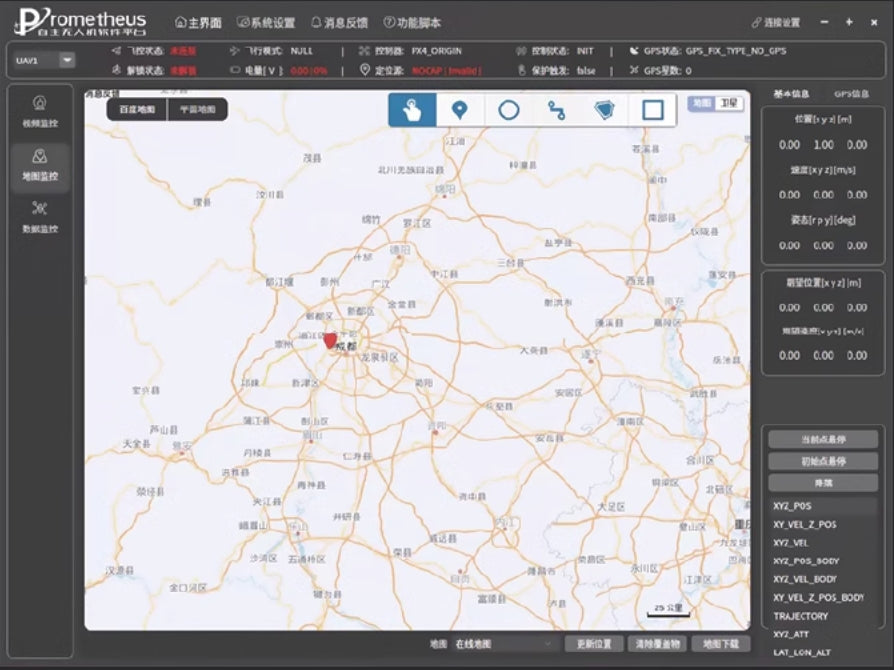
Взаємодія з дроном професійної наземної станції Prometheus
- Взаємодія наземної станції
Це демонструє інтерфейс і можливості взаємодії Професійна наземна станція Prometheus, що забезпечує безперебійний зв’язок і роботу з дроном за допомогою 3D-карт навколишнього середовища.
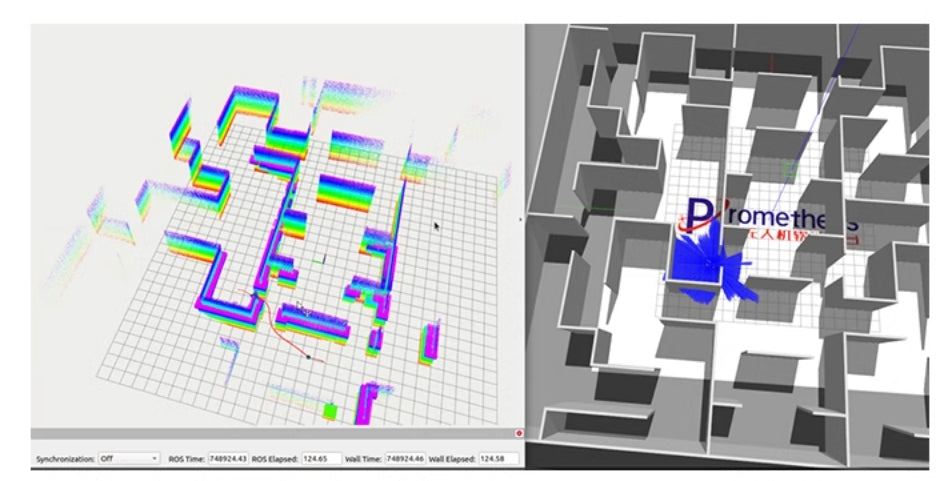
Демонстрація інтегрованої функції моделювання
- Імітація 3D LiDAR SLAM і планування шляху EGO-Swarm
Це ілюструє моделювання 3D LIDAR SLAM і Планування шляху EGO-Swarm у структурованому середовищі, демонструючи можливості системи в контрольованій демонстрації.
Особливості обладнання
Рамка дрона
The Kedway DP1000 платформа безпілотника промислового класу використовує a FOC (Field-Oriented Control) система живлення, що дозволяє двигуну обертатися стабільно, з низьким рівнем шуму, високою ефективністю та швидкою динамічною реакцією. Вся система дрона досягає стану «готовий до польоту» з відмінною якістю апаратного забезпечення, що забезпечує стабільні характеристики польоту. Це підтримує надтривала витривалість (70 хвилин без корисного навантаження), тоді як Дрон P600 потрібно приблизно 24 хвилини для стабілізації під час позиціонування.

Потужний обчислювальний блок
- Allspark Micro Edge Computing Unit, оснащений Модуль NVIDIA Orin NX, надання 100 TOPS обчислювальної потужності з плаваючою комою.
- Компактний розмір, легка вага, надійна системна сумісність і Високопродуктивні обчислення з прискоренням GPU.
- Попередньо встановлені всі середовища розробки, готові до використання, що підвищують ефективність вторинної розробки.
- Розміри: 102,5 мм × 62.5 мм × 31 мм

Інтегрований контролер передачі зображення
Ан пульт дистанційного керування безпілотником промислового рівня поєднання даних, зображення та елементів керування в одному.
- Діапазон частот: 2,4-2,483 ГГц
- Максимальна відстань передачі: 30 км
- Якість зображення: 1080P
- Термін служби батареї: 8-15 годин безперервної роботи
Під час роботи дрона користувачі можуть відстежувати інформацію про дрон у режимі реального часу, переглядати записи з камери та одночасно керувати дроном за допомогою джойстика, забезпечуючи повну візуалізацію польоту.

Високоточний RTK з двома антенами
Дрон оснащений Модуль позиціонування RTK-GNSS, який використовує швидку технологію диференціального позиціонування за фазою несучої та алгоритми придушення багатопроменевого поширення, щоб забезпечити точність позиціонування на рівні сантиметра для дронів. Він може одночасно отримувати дані RTCM від кількох наземних опорних станцій, підтримуючи короткі, середні та довгі базові розрахунки RTK.
З вбудованою мультимовністю Графічний веб-інтерфейс, це дозволяє конфігурувати нульовий поріг і візуалізувати відображення даних і процеси оновлення. Приймач також має зручний інтерфейс конфігурації веб-сторінки, що значно знижує операційний бар'єр. Він пропонує багаті інтерфейси та адаптується до різних сценаріїв застосування, забезпечуючи виняткову продуктивність у точному позиціонуванні.

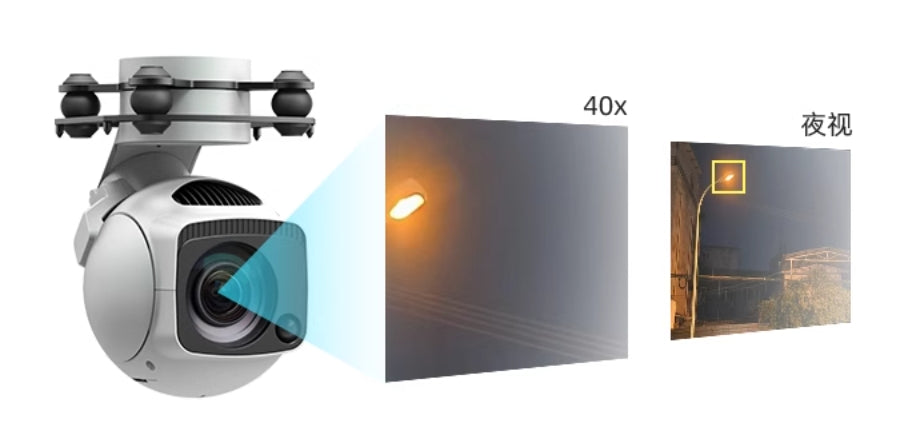
Оптико-електронний підвіс 40x
Оснащений високоточним 3-осьовим неортогональним підвісом, він оснащений 8,29-мегапіксельною камерою з 10-кратним оптичним масштабуванням у поєднанні з технологією цифрового масштабування, що забезпечує 40-кратне збільшення. Він може виводити 4K@30FPS video потоки через мережу. Крім того, він оснащений модулем лазерного підсвічування, що забезпечує чітке зображення навіть у темному середовищі.
MID 360 3D LiDAR
Mid-360 є економічно ефективним, безпечним і надійним лазерним датчиком виявлення та визначення дальності. Він широко використовується в таких сферах, як логістичні роботи, промислові роботи та розумні міста, підтримуючи такі функції, як картографування, позиціонування, ідентифікація та уникнення перешкод. Mid-360 може виявляти об’єкти на відстані від 0,1 метра до 100 метрів. Він відрізняється компактними розмірами, широким полем огляду, високою роздільною здатністю, високою надійністю та вбудованим IMU.
Технічні характеристики:
- FOV: 360° × 59°
- Мінімальна відстань виявлення: 0,1 м
- Діапазон (@10% відбиття): 40 м
- Точкова частота: 200 000 точок/с
- Розміри (мм): 65 × 65 × 60
- вага: 265 г
Особливості програмного забезпечення
Програмна система Prometheus V2
Платформа розробки базується на ROS і фреймворку з відкритим вихідним кодом Prometheus, пропонуючи багаті функціональні можливості та велику кількість додаткових інтерфейсів розробки для ефективного налаштування. Він надає інтерфейси для даних стану БПЛА та датчиків, включаючи інформацію про місцезнаходження, режими польоту, стан батареї та IMU. Крім того, він пропонує інтерфейси керування положенням, швидкістю, прискоренням і положенням, а також приклади програм для використання інтерфейсу розробки. БПЛА також включає вбудовані функції перевірки безпеки польоту (не уникнення перешкод), що дозволяє здійснювати автоматичну посадку в нестандартних ситуаціях, щоб зменшити ризик катастрофи, що робить розробку більш безпечною.

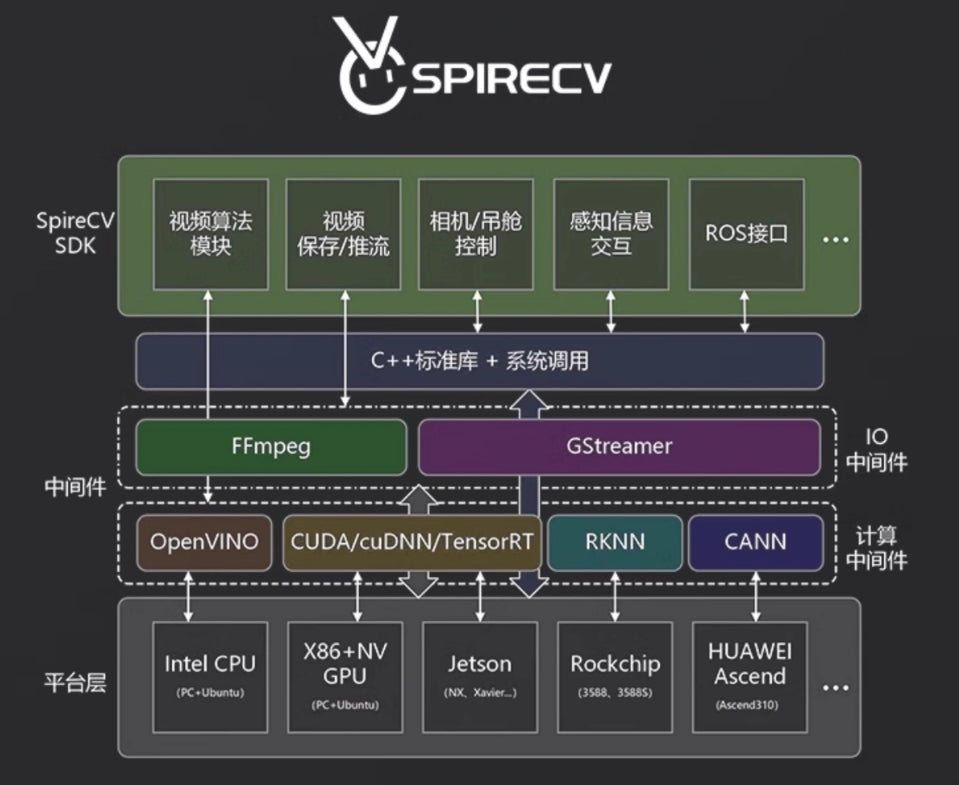
Бібліотека SpireCV Vision
Базований на бібліотеці SpireCV vision, це вбудований SDK для обробки зображень у реальному часі, розроблений спеціально для інтелектуальних безпілотних систем. Його основні функції включають керування підвісом/камерою, зберігання відео, потокове передавання, виявлення цілей, розпізнавання та відстеження. Він спрямований на надання розробникам інтелектуальних безпілотних систем високопродуктивних, високонадійних, простих і багатофункціональних можливостей обробки зображення. Ця модель підтримує навчання YOLO для функції відстеження транспортних засобів за кнопкою миші.
Система наземних станцій Prometheus
Наземна станція Prometheus — це людино-машинний інтерфейс, розроблений за допомогою Qt на основі системи Prometheus. Він використовує зв'язок TCP/UDP для спрощення конфігурації багатомашинного зв'язку. Наземна станція дозволяє користувачам швидко відтворювати різні функції системи Prometheus, забезпечуючи моніторинг стану БПЛА в режимі реального часу, а також такі функції, як команди зльоту, посадки та керування положенням одним клацанням миші.
Додатки
-
Наукові дослідження та розробка ШІ
- Тестування алгоритму ШІ
- Розширений аналіз даних датчиків
- Обробка та відстеження зображень у реальному часі
-
Промислове застосування
- Точне картографування та навігація в складних середовищах
- Виявлення та уникнення перешкод у логістиці та складуванні
- Перевірка інфраструктури, такої як лінії електропередач і трубопроводи
-
Академічне та освітнє використання
- Вторинне програмування для досліджень ШІ на основі ROS
- Лабораторні демонстрації та досліди
- Навчання автономному керуванню дроном
-
Розумні міські рішення
- 3D просторова реконструкція для містобудування
- Моніторинг і управління трафіком
- Спостереження та аналіз навколишнього середовища
-
Розробка на замовлення
- Створення прототипів для спеціалізованих промислових застосувань
- Тестування та інтеграція нових апаратних і програмних компонентів
-
Ліквідація та моніторинг навколишнього середовища
- Аероінспекція та моніторинг у постраждалих від стихійних лих районах
- Збір екологічних даних для дослідження та розробки політики
P600 забезпечує неперевершену гнучкість і функціональність, дозволяючи дослідникам, інженерам і розробникам виконувати складні проекти в різних сценаріях.
Related Collections







