







P600無人機科學研究無人機-ROS AI實驗二次程式設計工業開發平台Studio實驗室無人機DIY套件
P600無人機科學研究無人機-ROS AI實驗二次程式設計工業開發平台Studio實驗室無人機DIY套件
RCDrone
無法載入取貨服務供應情況
概述
這 P600科研無人機 是一個專為科學研究、產業開發和人工智慧實驗而設計的尖端平台。配備了高性能 NVIDIA Jetson Orin NX 運算模組,它提供了 100TOPS算力,使其成為高階人工智慧應用的理想選擇。該無人機具有 40倍光學變焦 雲台相機 對於高解析度成像, 3D 光達 SLAM 用於精確映射,以及 RTK定位 達到公分級精度。它是 整合 Prometheus V2 軟體 和 SpireCV視覺庫 支援二次編程,使其成為開發者的多功能工具。飛行時間長達 21分鐘, 一個 600 毫米對角軸,以及一個穩健的 4.05公斤起飛重量,P600 針對動態研發環境進行了最佳化。
規格
飛機
| 屬性 | 細節 |
|---|---|
| 飛機類型 | 四軸飛行器 |
| 起飛重量 | 大約。 4.05公斤(含電池) |
| 對角線軸距離 | 600毫米 |
| 方面 | 長 469 毫米,寬 469 毫米,高 400 毫米 |
| 最大懸停時間 | 大約。 21分鐘 |
| 懸停精度 | RTK:±0.015 m(水平),±0.01 m(垂直) 3D LiDAR SLAM:±0.2 m(水平),±0.1 m(垂直) |
| 工作溫度 | 6℃~40℃ |
| 主控MCU晶片 | STM32H743VIT6 / 216 MHz / 2M 程式儲存 / 512 KB 資料存儲 |
| 慣性測量單元 | ICM20689 |
| 晴雨表 | BMP388 |
| MTD | AT24C64 |
| 輸入/輸出介面 | 內建PX4IO-V2,支援8個脈寬調變接口,1RC介面(支援SBus、PPM、DSM) 外部介面:3個UART(GH1.25 6針),1CAN(GH1.25 4針)、飛控USB接口(Type-C) |
機上電腦
| 屬性 | 細節 |
|---|---|
| 姓名 | Allspark-Orin NX 車載計算機 |
| 模型 | IA160_V1 |
| 重量 | 大約。 188克 |
| 方面 | 102.5毫米×62.5毫米×31毫米(含風扇) |
| 處理器 | NVIDIA Jetson Orin NX |
| 記憶 | 16GB LPDDR5 |
| 運算能力 | 100 上衣 |
| 圖形處理器 | 整合1024核心NVIDIA Ampere架構GPU的32個Tensor Core |
| 中央處理器 | 8 核心 Arm® Cortex®-A78AE v8.2 64 位元 CPU (2MB L2 + 4MB L3) |
| 固態硬碟 | 128 GB(M。2個接口,可擴充) |
| 乙太網路 | 100 Mbps x2(1 個專用乙太網路端口,1 個可交換端口) |
| 無線上網 | 5G |
| 展示 | 微型HDMI(1920*1080P) |
| USB連接埠 | USB2.0:A型x1、C型x1 USB2.0:OTG x1 |
| 電源 | 10~26V@3A |
動力電池
| 屬性 | 細節 |
|---|---|
| 模型 | LPB610HV |
| 容量 | 10000毫安時 |
| 電池重量 | 1.2公斤 |
| 工作電壓 | 22V~26.1V |
| 儲存電壓 | 23.1V |
| 方面 | 長 180 毫米,寬 90 毫米,高 63 毫米 |
遙控器
| 屬性 | 細節 |
|---|---|
| 模型 | H16 |
| 頻道 | 16 |
| 頻率 | 2.400~2.483GHz |
| 工作電壓 | 4.2V |
| 電池 | 20000毫安培時 |
| 充電口 | C型9V-2A |
| 重量 | 1034克 |
| 方面 | 長 272 毫米,寬 183 毫米,高 94 毫米 |
通訊連結
| 屬性 | 細節 |
|---|---|
| 模型 | R16 |
| 通訊距離 | 大約。 600米,頻寬3.5Mbps |
| 工作電壓 | 7.2V~72V |
| 介面 | 2串口,1以太網,1HDMI,1C型 |
| 方面 | 長 76 毫米,寬 69 毫米,高 11 毫米 |
雲台相機
| 屬性 | 細節 |
|---|---|
| 模型 | GX40 |
| 雲台尺寸 | 長 85.8 毫米,寬 86 毫米,高 129.3 毫米 |
| GCU尺寸 | 長 45.4 毫米,寬 40 毫米,高 13.5 毫米 |
| 雲台重量 | 405克 |
| GCU重量 | 18.6克 |
| 工作電壓 | 14V~53V |
| 串流媒體協議 | RTSP(預設) |
| 編碼格式 | H.264 / H.264H / H.264B / H.265 / MJPEG |
| 解決 | - 4K30fps - 1080P@30fps - SCGA (12801024)@30fps <br> - 1.3M(1280960)@30fps - 720P@30fps |
| 位元率 | [email protected]、[email protected] |
鏡片
| 屬性 | 細節 |
|---|---|
| 類型 | 光學變焦鏡頭 |
| 焦距 | 4.8~48毫米 |
| 光圈(F/NO) | f1.7~f3.2 |
| 對角視場 (D) | 67.2°~7.6° |
| 垂直視場 (V) | 36.1°~3.7° |
| 水平視野 (H) | 60.2°~6.6° |
| 光學變焦比 | 10倍 |
影像感測器
| 屬性 | 細節 |
|---|---|
| 感測器類型 | 互補金屬氧化物半導體 |
| 有效像素 | 8.29M |
| 感測器尺寸 | 1/2.8英寸 |
| 像素大小 | 1.45×1.45(微米) |
| 電子快門速度 | 1~1/30000秒 |
照明器
| 屬性 | 細節 |
|---|---|
| 類型 | 雷射 |
| 波長 | 850±10奈米 |
| 力量 | 0.8W |
| 照明距離 | ≤200米 |
即時動態定位
| 屬性 | 細節 |
|---|---|
| 模型 | M15-RTK |
| 重量 | 90克 |
| 方面 | 長度 80 毫米,寬度 50 毫米,高度 20 毫米 |
| 支援的衛星類型 | 北斗/GPS/格洛納斯/QZSS |
| 電源 | 9~36V(建議12V) |
| 天線連接器 | SMA-F |
| 功能連接埠 | UARTx2、CANx1、USB2.0x1 |
充電器
| 屬性 | 細節 |
|---|---|
| 模型 | C1-XR |
| 交流輸入電壓 | 100~240V |
| 直流輸入電壓 | 11~18V |
| 方面 | 長 130 毫米,寬 115 毫米,高 61 毫米 |
| 重量 | 380克 |
| 充電電流 | 0。1A~10A |
| 支援的電池芯 | 1~6格 |
3D光達
| 屬性 | 細節 |
|---|---|
| 模型 | 中360 |
| 雷射波長 | 905奈米 |
| 檢測範圍 | 40 m(105%反射率時) |
| 視場角 (FOV) | 水平:360°,垂直:-7°~52° |
| 最小範圍 | 0.1米 |
| 點雲率 | 10赫茲(典型) |
| 每秒點數 | 200,000 點/秒 |
| 資料介面 | 100 BASE-TX 乙太網 |
| 資料同步 | IEEE 1588-2008(PTP v2)、GPS |
| 內部IMU | ICM40609 |
| 電源 | 7~27V |
| 方面 | 65 毫米(寬)x 65 毫米(深)x 60 毫米(高) |
| 重量 | 115克 |
| 工作溫度 | -20℃~55℃ |
軟體參數
機上電腦
| 屬性 | 細節 |
|---|---|
| 模型 | 傑特森奧林 NX |
| 作業系統 | 烏班圖20.04 |
| 使用者名稱 | 阿莫夫 |
| 密碼 | 阿莫夫 |
| L4T版本 | 35.2.1 |
| 噴射背包版本 | 5.1 |
| CUDA版本 | 11.4.315 |
| 實感SDK | 2.50.0 |
| ROS版本 | 意念的 |
| OpenCV版本 | 4.7.0 |
| 實感ROS | 2.3.2 |
包裝清單
| 姓名 | 規格/型號 | 數量/單位 |
|---|---|---|
| P600主機 | P600-Allpark2-RTK-GX40-S3 | 1套 |
| M15-RTK地面終端 | M15-RTK | 1 件 |
| GNSS 蘑菇天線 | 蘑菇天線 | 1 件 |
| GNSS 天線延長線 | 天線延長線 | 1 條電纜 |
| H16遙控器 | H16 | 1 單位 |
| 6S 10000mAh動力電池 | 6S 10000mAh | 1套 |
| 3S 4000mAh鋰電池 | 3S 4000mAh | 1套 |
| 智慧平衡充電器 | C1-XR | 1 單位 |
| 網路線 | 1.5米 | 1 條電纜 |
| 安全繩 | 50米 | 1包 |
| HDMI支架 | / | 1 件 |
| HDMI 轉接器電纜 | / | 1 件 |
| 電腦設定 | / | 1 件 |
| 2D 滴板 | 35×35厘米 | 1 件 |
| 航空案例 | 740×540×510毫米 | 1套 |
| 配件電纜組 | / | 1包 |
| 證書 | / | 1 張 |
| 功能測試清單 | / | 1 張 |
細節
Prometheus 600 科研無人機開發平台
這 Prometheus 600 科研無人機開發平台 (簡稱P600)是P600系列的第四代產品。它深度融合了兩大核心技術, 普羅米修斯 和 尖塔CV,並配備40倍光學變焦雲台相機。這種設定可以實現遠距離目標偵測和追蹤、高空自主著陸以及空中巡航任務。
該系統支援3D LiDAR SLAM 快利奧,實現高精度3D SLAM建圖。此外,它還具有 EGO-Swarm多智能體協作演算法,可應用於室內外3D空間重建、無人機導航避障等多種場景。
這些先進的功能得到了補充 普羅米修斯專業地面站,提供即時視覺化回饋、運行監控、動態參數調整,讓開發者更容易掌握並加速二次開發。

P600無人機三個版本

光電雲台的靈活控制
GX40雲台相機支援多場景控制,並整合鍊式遙控器,可在航點導航過程中實現目標搜尋。使用 SpireCV視覺庫,方便對目標的檢測和跟踪,實現雲台對目標的即時鎖定。
- 夜間照明
- 目標偵測與追蹤

目標點擊和追蹤
使用 YOLOv5檢測演算法 並利用 COCO 通用資料集來偵測和追蹤目標。這 Nanotrack追蹤演算法 鎖定選定的目標進行追蹤。在不改變條件的情況下,可以辨識並追蹤最遠30公尺外的目標。透過 40倍光學變焦與電子變焦,實現遠距離目標偵測與追蹤。無人機追蹤過程中, 普羅米修斯專業地面站 允許基於距離的動態目標追蹤切換(預設為 10 公尺)。
- 30m 追蹤
- 20m 追蹤
- 10m 處追蹤

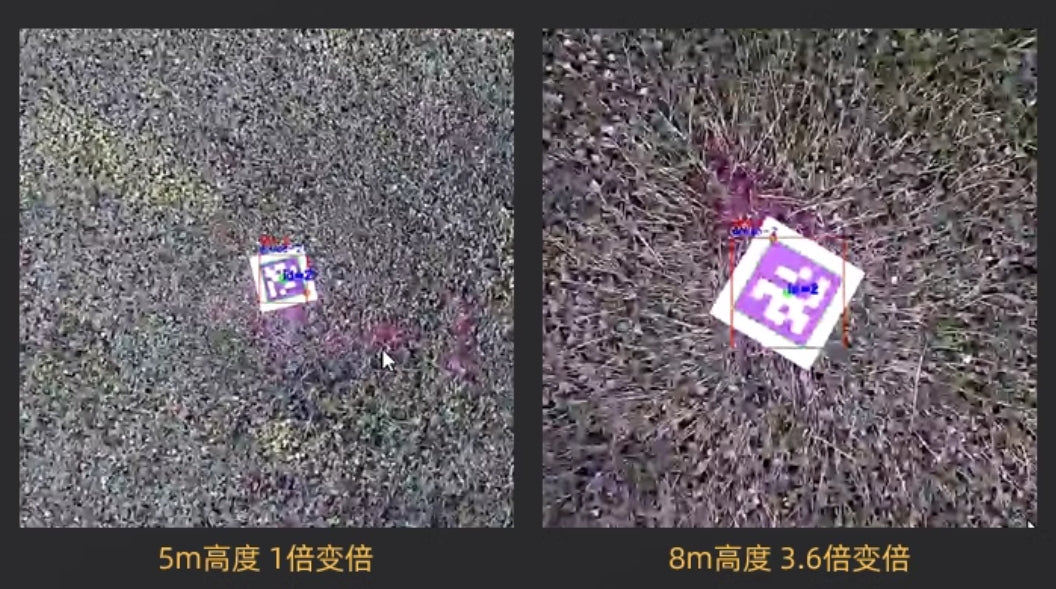
QR 圖碼引導登陸
使用 SpireCV視覺庫,實現了QR碼的精確檢測和位置估計。 GX40可以在不同高度對二維碼進行精準引導降落。雲台相機中心與二維碼中心對齊,誤差範圍為30公分。
- 5m 高度,1 倍變焦
- 8m 高度,3.6 倍變焦
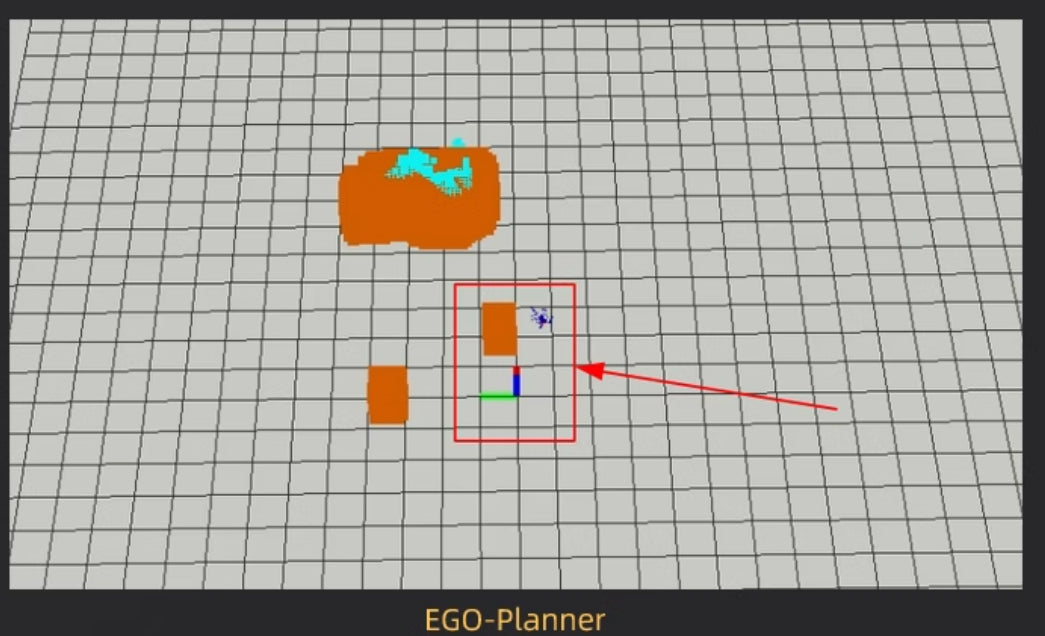
自我規劃師
支援 EGO-Planner路徑規劃演算法 並提供 Octomap映射演算法。結合專業地面站,實現自主3D動態路徑規劃。
穩定可靠的無人機控制應用
P600無人機搭載高精度RTK設備,可實現室外高精度懸停,水平精度可達1厘米,垂直精度可達1.5公分。結合 Prometheus軟體系統控制模組,它可以實現精確的無人機控制。
無人機控制模組充當軟體程式與無人機之間的“橋樑”,提供初始位置懸停、當前位置懸停、著陸、移動等多種控制狀態。其中包括六種控制模式:習慣系統位置、速度、位置速度整合控制、軌跡控制模式。總共,它提供了七種控制模式。

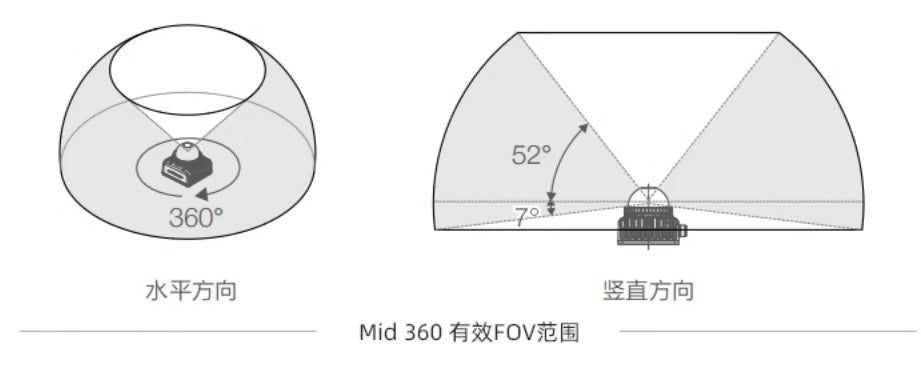
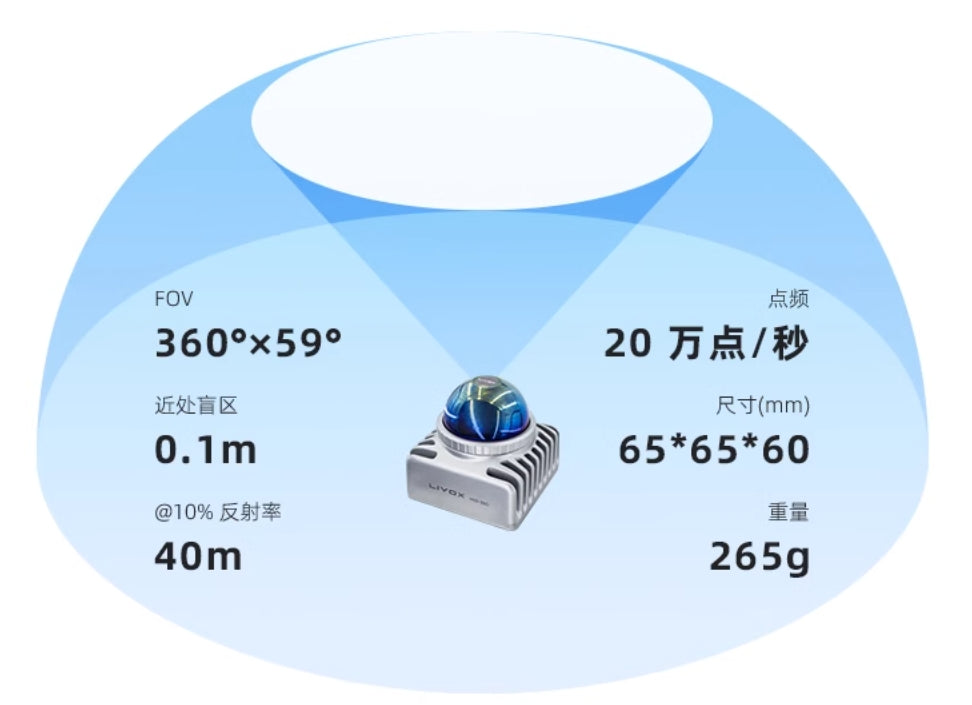
3D 雷射雷達 Mid-360
- 低盲點 |廣闊的視野 |多場景應用
這 中360度 特點是 360° 水平視場 和一個 最大垂直視角為 59°。當目標物體反射率為10%時,最大偵測範圍可達 40米,盲點範圍小至 10米。適應弱光、強光等各種複雜環境。
配備Mid-360模組, P600無人機 實現盲區全景覆蓋,確保無人機在多場景環境下無縫運作。
- 圖表說明:
- 水平方向:360°
- 垂直方向:52°最大FOV

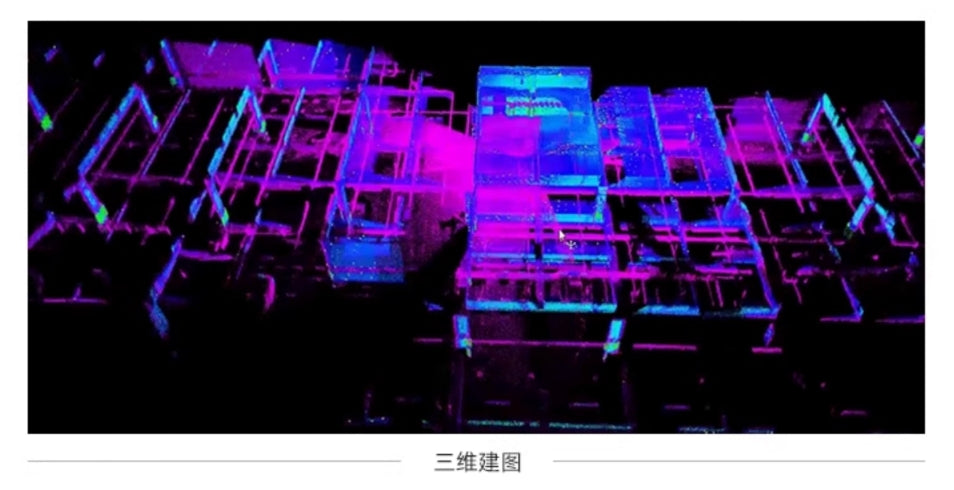
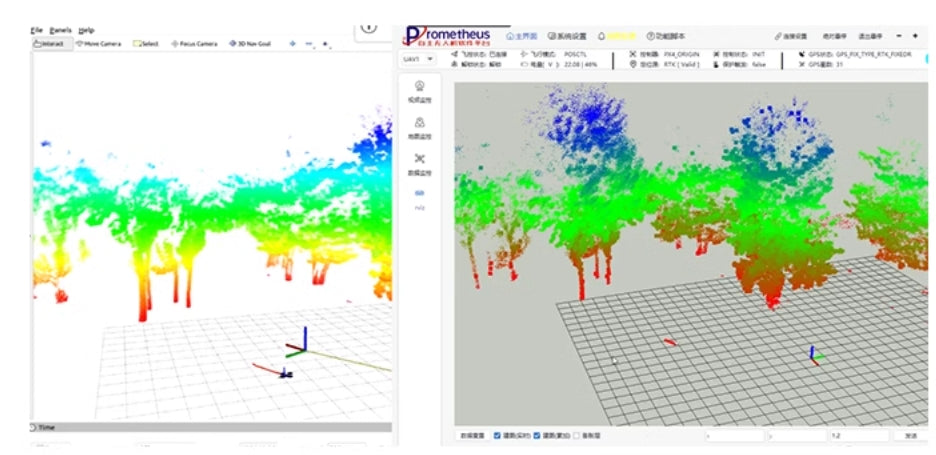
快速且準確的 3D 環境測繪
這 P600無人機 配備先進的環境感知能力,使其能夠在飛行過程中快速擷取周圍環境數據。該數據被即時處理以生成 3D環境地圖,為各種任務提供精確的空間感知和導航支援。
用於導航和避障的 EGO-Swarm 路徑規劃
這 中360 發佈點雲數據和位置數據,結合 EGO-Swarm路徑規劃演算法,顯著增強無人機自主適應動態環境變化的能力。能夠對運動過程中的障礙物進行即時分析與反應,動態調整追蹤目標,最大速度為 2米/秒。這確保了在未知和複雜的操作場景中卓越的靈活性和適應性。
該功能極大提高了無人機的任務效率,使其能夠高效、準確地完成多種任務
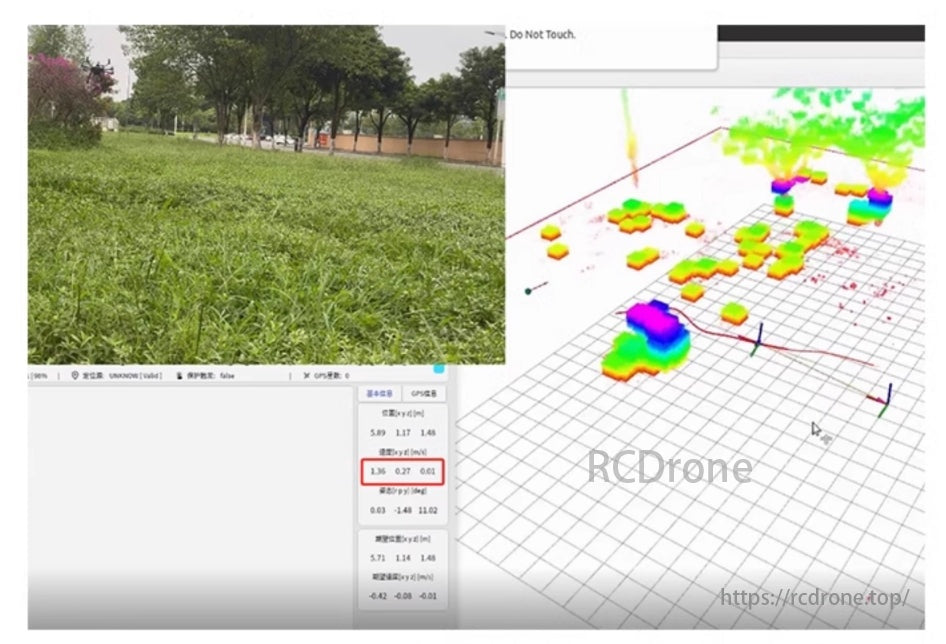
Prometheus專業地面站無人機交互
- 地面站交互
這展示了介面和互動能力 普羅米修斯專業地面站,透過 3D 環境測繪實現與無人機的無縫通訊和操作。
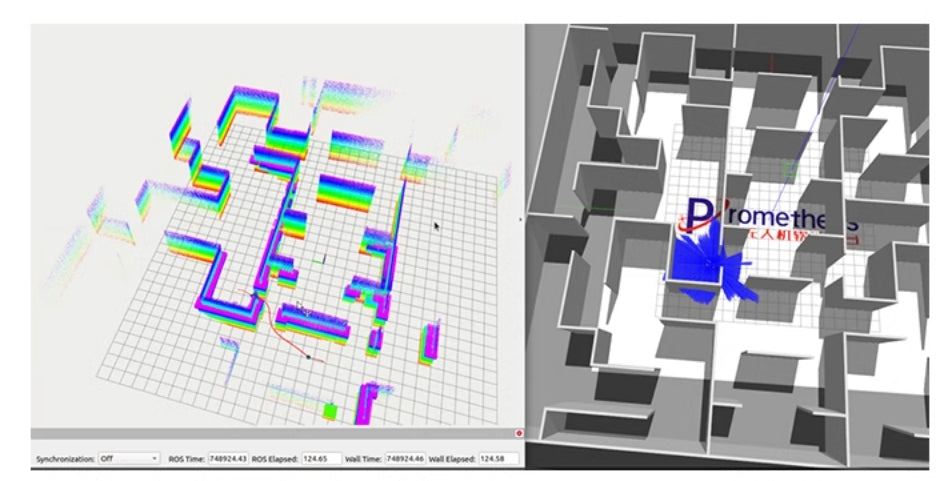
綜合模擬功能演示
- 模擬 3D LiDAR SLAM 和 EGO-Swarm 路徑規劃
這說明了模擬 3D 光達 SLAM 和 EGO-Swarm路徑規劃 在結構化環境中,透過受控演示展示系統的功能。
硬體特性
無人機框架
這 科德威DP1000 工業級無人機平台利用 FOC(磁場定向控制) 動力系統,使馬達轉動穩定,噪音低,效率高,動態反應快。整個無人機系統以優異的硬體品質達到「待飛」狀態,確保穩定的飛行性能。它支持 超長續航(空載70分鐘),而 P600無人機 大約需要 24分鐘穩定 定位時。

強大的計算單元
- Allspark 微型邊緣運算單元,配備了 NVIDIA Orin NX 模組,提供 100 TOPS浮點運算能力。
- 體積緊湊、重量輕、系統相容性強, GPU加速的高效能運算。
- 預裝所有開發環境,即用型,提升二次開發效率。
- 方面:102.5 毫米×62。5毫米×31毫米

整合圖傳控制器
一個 工業級無人機遙控器 將資料、影像和控制合而為一。
- 頻帶:2.4-2.483GHz
- 最大傳輸距離: 30 公里
- 影像品質:1080P
- 電池壽命:連續運轉8-15小時
無人機操作過程中,使用者可即時監控無人機資訊、查看攝影機畫面,同時透過搖桿控制無人機,實現飛行操作完全可視化。

雙天線高精度RTK
該無人機配備了 RTK-GNSS定位模組,利用快速載波相位差分定位技術和多路徑抑制演算法,為無人機提供公分級定位精度。它可以同時接收來自多個地面參考站的RTCM數據,支援短、中、長基線RTK計算。
具有內建多語言 網頁圖形使用者介面,實現零門檻配置、視覺化資料展示和升級流程。接收機還具有人性化的網頁配置介面,大大降低了操作門檻。介面豐富,適應多種應用場景,精準定位效能卓越。

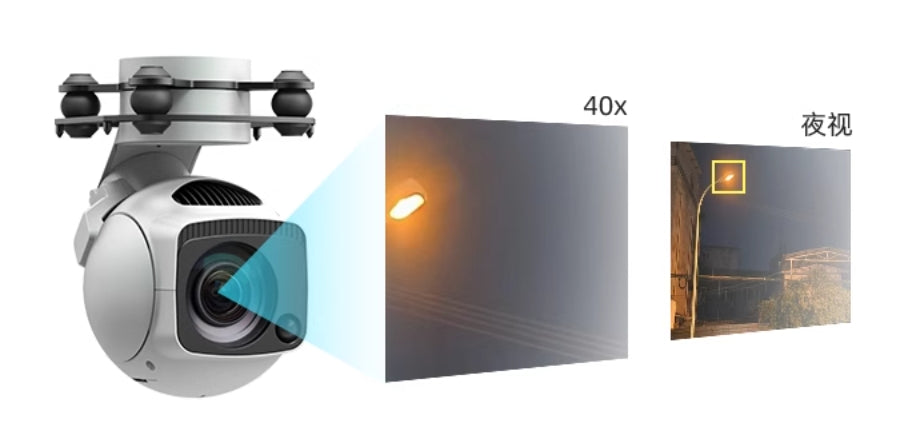
40x 光電雲台
配備高精度三軸非正交雲台,8.29兆像素10倍光學變焦攝影機結合數位變焦技術,可達到高達40倍的放大倍率。可以輸出 4K@30FPS video 網路上的流。此外,它還配備了雷射照明模組,即使在完全黑暗的環境下也能實現清晰的影像。
MID 360 3D 光達
Mid-360 是一款經濟高效、安全可靠的雷射探測和測距感測器。廣泛應用於物流機器人、工業機器人、智慧城市等領域,支援建圖、定位、辨識、避障等功能。 Mid-360 可以偵測近至 0.1 公尺和遠至 100 公尺的物體。它具有體積小、視野寬、解析度高、可靠性高、整合IMU等特性。
規格:
- 視場角:360°×59°
- 最小檢測距離:0.1m
- 範圍(@10% 反射率):40米
- 點頻率:200,000點/秒
- 尺寸(毫米):65×65×60
- 重量:265克
軟體特點
普羅米修斯V2軟體系統
開發平台基於ROS和Prometheus開源框架,提供豐富的功能和大量的二次開發接口,實現高效定制。它提供無人機狀態和感測器數據的接口,包括位置資訊、飛行模式、電池狀態和IMU。此外,它還提供位置、速度、加速度和姿態的控制接口,以及用於開發接口使用的範例程式。該無人機還內建飛行安全檢查功能(非避障),可實現異常情況自動降落,降低墜機風險,讓開發更有保障。

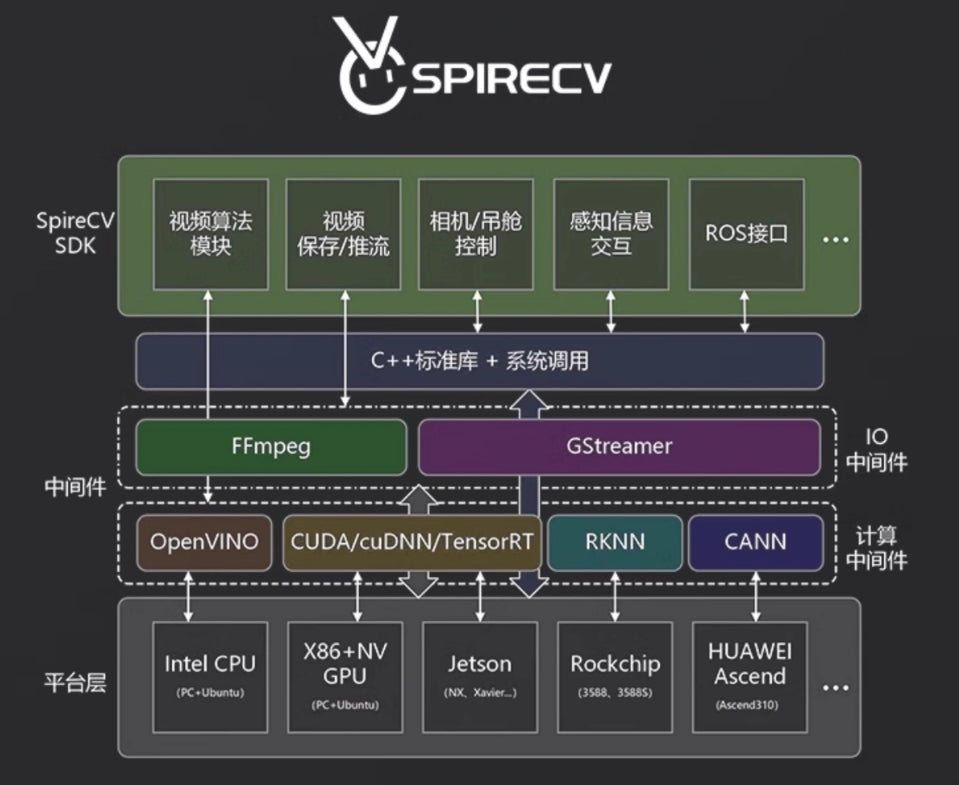
SpireCV 視覺庫
這是一款基於SpireCV視覺庫,專為智慧無人系統設計的車載影像即時處理SDK。其主要功能包括雲台/相機控制、視訊儲存、串流媒體、目標偵測、識別和追蹤。旨在為智慧無人系統開發者提供高效能、高可靠、簡單且功能豐富的視覺處理能力。此模型支援針對點擊式車輛追蹤功能的 YOLO 訓練。
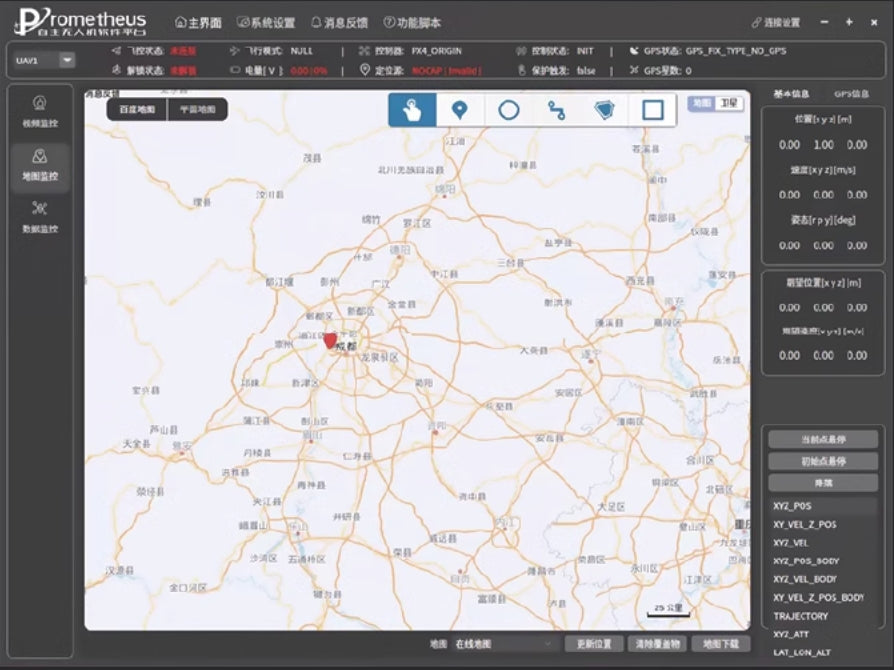
普羅米修斯地面站系統
Prometheus地面站是基於Prometheus系統,使用Qt開發的人機介面。它採用TCP/UDP通訊方式,簡化多機通訊的配置。地面站使用戶能夠快速複製Prometheus系統的各種功能,提供無人機狀態的即時監控,以及一鍵起飛、降落、位控指揮操作等功能。
應用領域
-
科學研究與人工智慧開發
- AI演算法測試
- 先進的感測器數據分析
- 即時影像處理和追蹤
-
工業應用
- 複雜環境下的精準測繪與導航
- 物流和倉儲中的障礙物偵測和規避
- 檢查電力線路和管道等基礎設施
-
學術和教育用途
- 基於ROS的人工智慧研究的二次編程
- 實驗室演示和實驗
- 無人機自主導航培訓
-
智慧城市解決方案
- 都市計畫的 3D 空間重建
- 交通監控與管理
- 監測和環境分析
-
客製化開發
- 專門工業應用的原型設計
- 新硬體和軟體組件的測試和集成
-
災難應變和環境監測
- 災區空中巡查監測
- 用於研究和政策制定的環境資料收集
P600 提供無與倫比的靈活性和功能,使研究人員、工程師和開發人員能夠跨不同場景執行複雜的專案。







