







P600 الطائرة بدون طيار للبحث العلمي بدون طيار - ROS AI التجريبية الثانوية البرمجة منصة التطوير الصناعي استوديو مختبر الطائرة بدون طيار DIY كيت
P600 الطائرة بدون طيار للبحث العلمي بدون طيار - ROS AI التجريبية الثانوية البرمجة منصة التطوير الصناعي استوديو مختبر الطائرة بدون طيار DIY كيت
RCDrone
تعذر تحميل توفر الالتقاط
ملخص
ال طائرة بدون طيار للبحث العلمي P600 هي منصة متطورة مصممة للبحث العلمي والتطوير الصناعي وتجارب الذكاء الاصطناعي. وهي مجهزة بأجهزة عالية الأداء وحدة الحوسبة NVIDIA Jetson Orin NX، فهو يسلم قوة الحوسبة 100 TOPSمما يجعلها مثالية لتطبيقات الذكاء الاصطناعي المتقدمة. تتميز هذه الطائرة بدون طيار بـ تقريب بصري 40x كاميرا جيمبال للحصول على تصوير عالي الدقة، 3D ليدار سلام للرسم الدقيق للخرائط، و تحديد موقع RTK للحصول على دقة على مستوى السنتيمتر. برنامج Prometheus V2 المتكامل و مكتبة رؤية SpireCV دعم البرمجة الثانوية، مما يجعله أداة متعددة الاستخدامات للمطورين. مع وقت طيران يصل إلى 21 دقيقة، أ محور قطري 600 مم، وقوي وزن الإقلاع 4.05 كجمتم تحسين P600 لتناسب بيئات البحث والتطوير الديناميكية.
تحديد
الطائرات
| يصف | تفاصيل |
|---|---|
| نوع الطائرة | طائرة رباعية المراوح |
| وزن الإقلاع | حوالي 4.05 كجم (بما في ذلك البطارية) |
| مسافة المحور القطري | 600 ملم |
| أبعاد | الطول 469 ملم، العرض 469 ملم، الارتفاع 400 ملم |
| الحد الأقصى لوقت التحويم | حوالي 21 دقيقة |
| دقة التحويم | RTK: ±0.015 م (أفقيًا)، ±0.01 م (رأسيًا) 3D LiDAR SLAM: ±0.2 متر (أفقيًا)، ±0.1 متر (رأسيًا) |
| درجة حرارة التشغيل | 6 درجة مئوية ~ 40 درجة مئوية |
| شريحة MCU الرئيسية | STM32H743VIT6 / 216 ميجا هرتز / تخزين برنامج 2 ميجا بايت / تخزين بيانات 512 كيلو بايت |
| وحدة قياس القصور الذاتي | اي سي ام 20689 |
| البارومتر | بي ام بي 388 |
| إم تي دي | AT24C64 |
| واجهات الإدخال/الإخراج | مدمج PX4IO-V2، يدعم 8واجهات PWM، 1واجهة RC (تدعم SBus وPPM وDSM) الواجهات الخارجية: 3UART (GH1.25 6 دبابيس)، 1CAN (GH1.25 4-pin)، واجهة التحكم في الطيران USB (النوع C) |
كمبيوتر على متن الطائرة
| يصف | تفاصيل |
|---|---|
| اسم | كمبيوتر Allspark-Orin NX المدمج |
| نموذج | IA160_V1 |
| وزن | حوالي 188 جرام |
| أبعاد | 102.5 مم × 62.5 مم × 31 مم (بما في ذلك المروحة) |
| المعالج | بطاقة الرسوميات NVIDIA Jetson Orin NX |
| ذاكرة | 16 جيجابايت LPDDR5 |
| قوة الحوسبة | 100 توبس |
| وحدة معالجة الرسوميات | وحدة معالجة رسومية مدمجة بـ 32 نواة Tensor من معمارية NVIDIA Ampere ذات 1024 نواة |
| وحدة المعالجة المركزية | وحدة معالجة مركزية Arm® Cortex®-A78AE v8.2 64 بت ذات 8 أنوية (2 ميجا بايت L2 + 4 ميجا بايت L3) |
| SSD | 128 جيجابايت (M.2 واجهة قابلة للتوسعة |
| إيثرنت | 100 ميجابت في الثانية x2 (1 منفذ إيثرنت مخصص، 1 قابل للتبديل) |
| واي فاي | 5G |
| عرض | ميكرو HDMI (1920*1080 بكسل) |
| منافذ USB | USB2.0: النوع A x1، النوع C x1 USB2.0: OTG x1 |
| مزود الطاقة | 10~26 فولت عند 3 أمبير |
بطارية الطاقة
| يصف | تفاصيل |
|---|---|
| نموذج | ال بي بي 610 اتش في |
| سعة | 10000 مللي أمبير |
| وزن البطارية | 1.2 كجم |
| جهد التشغيل | 22 فولت~26.1 فولت |
| جهد التخزين | 23.1 فولت |
| أبعاد | الطول 180 ملم، العرض 90 ملم، الارتفاع 63 ملم |
جهاز التحكم عن بعد
| يصف | تفاصيل |
|---|---|
| نموذج | ح16 |
| القنوات | 16 |
| تكرار | 2.400~2.483 جيجاهرتز |
| جهد التشغيل | 4.2 فولت |
| بطارية | 20000 مللي أمبير |
| منفذ الشحن | النوع سي 9 فولت - 2 أمبير |
| وزن | 1034 جرام |
| أبعاد | الطول 272 ملم، العرض 183 ملم، الارتفاع 94 ملم |
رابط التواصل
| يصف | تفاصيل |
|---|---|
| نموذج | ر16 |
| مسافة التواصل | حوالي 600 متر، عرض النطاق الترددي 3.5 ميجابايت في الثانية |
| جهد التشغيل | 7.2 فولت~72 فولت |
| الواجهات | 2يو آر تي، 1إيثرنت، 1اتش دي ام اي، 1النوع-C |
| أبعاد | الطول 76 ملم، العرض 69 ملم، الارتفاع 11 ملم |
كاميرا جيمبال
| يصف | تفاصيل |
|---|---|
| نموذج | جي اكس 40 |
| أبعاد المحور | الطول 85.8 ملم، العرض 86 ملم، الارتفاع 129.3 ملم |
| أبعاد GCU | الطول 45.4 ملم، العرض 40 ملم، الارتفاع 13.5 ملم |
| وزن الجيمبال | 405 جرام |
| وزن GCU | 18.6 جرام |
| جهد التشغيل | 14 فولت~53 فولت |
| بروتوكول البث | RTSP (افتراضي) |
| تنسيق الترميز | H.264 / H.264H / H.264B / H.265 / MJPEG |
| دقة | - 4K30 إطارًا في الثانية - 1080P@30fps - إس سي جي إيه (12801024)@30 إطارًا في الثانية <br> - 1.3م (1280960)@30 إطارًا في الثانية - 720P@30fps |
| معدل البت | 0.25 ميجا بت في الثانية ~ 10 ميجا بت في الثانية @ H.265، 0.5 ميجا بت في الثانية ~ 16 ميجا بت في الثانية عند H.264 |
عدسة
| يصف | تفاصيل |
|---|---|
| يكتب | عدسة تكبير بصري |
| البعد البؤري | 4.8~48 ملم |
| فتحة العدسة (F/NO) | ف1.7~ف3.2 |
| مجال الرؤية القطري (D) | 67.2°~7.6° |
| مجال الرؤية الرأسي (V) | 36.1°~3.7° |
| مجال الرؤية الأفقي (H) | 60.2 درجة ~ 6.6 درجة |
| نسبة التكبير البصري | 10x |
مستشعر الصورة
| يصف | تفاصيل |
|---|---|
| نوع المستشعر | سيموس |
| بكسلات فعالة | 8.29 مليون |
| حجم المستشعر | 1/2.8 بوصة |
| حجم البكسل | 1.45×1.45 (ميكرومتر) |
| سرعة الغالق الإلكترونية | 1~1/30000 ثانية |
مُضيئ
| يصف | تفاصيل |
|---|---|
| يكتب | الليزر |
| الطول الموجي | 850±10 نانومتر |
| قوة | 0.8 واط |
| مسافة الإضاءة | ≤200 متر |
آر تي كيه
| يصف | تفاصيل |
|---|---|
| نموذج | م15-RTK |
| وزن | 90 جرام |
| أبعاد | الطول 80 ملم، العرض 50 ملم، الارتفاع 20 ملم |
| أنواع الأقمار الصناعية المدعومة | نظام بي دي إس/جي بي إس/غلوناس/نظام كيو زي إس إس |
| مزود الطاقة | 9~36 فولت (يوصى بـ 12 فولت) |
| موصل الهوائي | إس إم إيه-إف |
| المنافذ الوظيفية | UARTx2، CANx1، USB2.0x1 |
شاحن
| يصف | تفاصيل |
|---|---|
| نموذج | سي 1-XR |
| جهد الدخل المتردد | 100~240 فولت |
| جهد الدخل المستمر | 11~18 فولت |
| أبعاد | الطول 130 ملم، العرض 115 ملم، الارتفاع 61 ملم |
| وزن | 380 جرام |
| تيار الشحن | 0.1 أمبير~10 أمبير |
| خلايا البطارية المدعومة | 1~6 خلايا |
ليدار ثلاثي الأبعاد
| يصف | تفاصيل |
|---|---|
| نموذج | ميد360 |
| طول موجة الليزر | 905 نانومتر |
| مدى الكشف | 40 م (عند انعكاسية 105%) |
| مجال الرؤية (FOV) | أفقي: 360 درجة، عمودي: -7°~52° |
| الحد الأدنى للمدى | 0.1 متر |
| معدل سحابة النقاط | 10 هرتز (نموذجي) |
| نقاط في الثانية | 200000 نقطة/ثانية |
| واجهة البيانات | 100 قاعدة-تي إكس إيثرنت |
| مزامنة البيانات | IEEE 1588-2008 (PTP v2)، نظام تحديد المواقع العالمي (GPS) |
| وحدة قياس القصور الذاتي الداخلية | اي سي ام 40609 |
| مزود الطاقة | 7~27 فولت |
| أبعاد | 65 مم (عرض) × 65 مم (عمق) × 60 مم (ارتفاع) |
| وزن | 115 جرام |
| درجة حرارة التشغيل | -20 درجة مئوية ~ 55 درجة مئوية |
معلمات البرنامج
كمبيوتر على متن الطائرة
| يصف | تفاصيل |
|---|---|
| نموذج | جيتسون أورين NX |
| نظام التشغيل | أوبونتو 20.04 |
| اسم المستخدم | أموف |
| كلمة المرور | أموف |
| نسخة L4T | 35.2.1 |
| نسخة Jetpack | 5.1 |
| نسخة كودا | 11.4.315 |
| مجموعة أدوات Realsense | 2.50.0 |
| نسخة ROS | عقلي |
| نسخة OpenCV | 4.7.0 |
| نظام Realsense ROS | 2.3.2 |
قائمة الحزمة
| اسم | المواصفات/النموذج | الكمية/الوحدة |
|---|---|---|
| الطائرة الرئيسية P600 | P600-Allpark2-RTK-GX40-S3 | مجموعة واحدة |
| محطة أرضية M15-RTK | م15-RTK | 1 قطعة |
| هوائي GNSS على شكل فطر | هوائي الفطر | 1 قطعة |
| كابل تمديد هوائي GNSS | كابل تمديد الهوائي | 1 كابل |
| جهاز التحكم عن بعد H16 | ح16 | 1 وحدة |
| بطارية 6S بقوة 10000 مللي أمبير | 6S 10000 مللي أمبير | مجموعة واحدة |
| بطارية ليثيوم 3S 4000 مللي أمبير | 3S 4000 مللي أمبير | مجموعة واحدة |
| شاحن التوازن الذكي | سي 1-XR | 1 وحدة |
| كابل الشبكة | 1.5 متر | 1 كابل |
| حبل السلامة | 50 متر | 1 حزمة |
| حامل HDMI | / | 1 قطعة |
| كابل محول HDMI | / | 1 قطعة |
| تكوين الكمبيوتر | / | 1 قطعة |
| لوحة إسقاط ثنائية الأبعاد | 35×35 سم | 1 قطعة |
| قضية الطيران | 740×540×510 مم | مجموعة واحدة |
| مجموعة كابلات الملحقات | / | 1 حزمة |
| شهادة | / | 1 ورقة |
| قائمة التحقق من اختبار الوظيفة | / | 1 ورقة |
تفاصيل
منصة تطوير الطائرات بدون طيار للأبحاث العلمية بروميثيوس 600
ال منصة تطوير الطائرات بدون طيار للأبحاث العلمية بروميثيوس 600 (يشار إليه باسم P600) هو منتج الجيل الرابع في سلسلة P600. فهو يدمج بشكل عميق تقنيتين أساسيتين، بروميثيوس و سبير سي فيوهي مجهزة بكاميرا ذات تقريب بصري 40x. يتيح هذا الإعداد اكتشاف الأهداف وتتبعها على مسافات طويلة، والهبوط المستقل من ارتفاعات عالية، ومهام الطيران الجوي.
يدعم النظام تقنية 3D LiDAR SLAM مع سريع-ليو، مما يحقق رسم خرائط SLAM ثلاثية الأبعاد عالية الدقة. بالإضافة إلى ذلك، يتميز بـ خوارزمية التعاون بين عدة وكلاء EGO-Swarm، مما يسمح بالتطبيقات في سيناريوهات مختلفة مثل إعادة بناء الفضاء ثلاثي الأبعاد الداخلي والخارجي وتجنب العوائق أثناء ملاحة الطائرات بدون طيار.
يتم استكمال هذه القدرات المتقدمة من خلال محطة بروميثيوس الأرضية الاحترافية، والذي يوفر ملاحظات بصرية في الوقت الفعلي ومراقبة التشغيل وتعديل المعلمات الديناميكية، مما يسهل على المطورين إتقان وتسريع التطوير الثانوي.

ثلاث نسخ من طائرة P600 بدون طيار

التحكم المرن في المحور البصري الإلكتروني
تدعم كاميرا GX40 gimbal التحكم في سيناريوهات متعددة وتدمج التحكم عن بعد القائم على السلسلة لتمكين البحث عن الهدف أثناء التنقل عبر نقطة المسار. باستخدام مكتبة رؤية SpireCV، فهو يسهل اكتشاف الأهداف وتتبعها، مما يحقق قفل الجيمبال على الهدف في الوقت الحقيقي.
- الإضاءة الليلية
- تحديد الهدف وتتبعه

النقر المستهدف والتتبع
استخدام خوارزمية الكشف عن YOLOv5 وباستخدام مجموعة بيانات COCO العالمية، يتم اكتشاف الأهداف وتتبعها. خوارزمية تتبع النانو يتتبع الأهداف المحددة دون تغيير الظروف، ويمكن تحديد الأهداف على مسافة تصل إلى 30 مترًا وتتبعها. من خلال تقريب بصري 40x وتقريب إلكترونييتم تحقيق اكتشاف الهدف وتتبعه على مسافة بعيدة. أثناء تتبع الطائرات بدون طيار، محطة بروميثيوس الأرضية الاحترافية يسمح بمفاتيح تتبع الهدف الديناميكية القائمة على المسافة (الإعداد الافتراضي هو 10 أمتار).
- التتبع على مسافة 30 مترًا
- التتبع على مسافة 20 مترًا
- التتبع على مسافة 10 أمتار

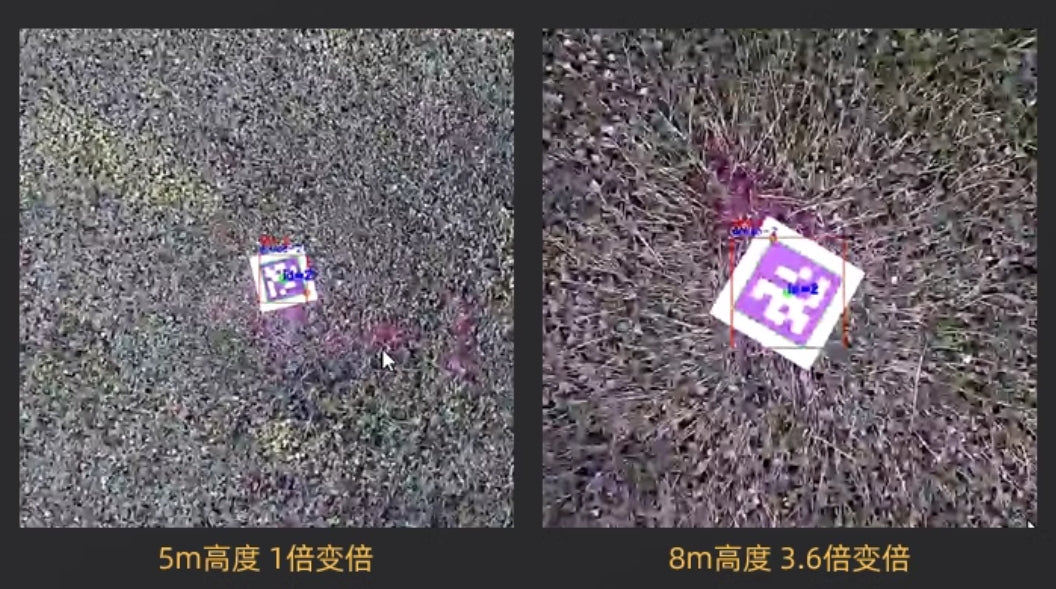
دليل الوصول باستخدام رمز الاستجابة السريعة QR
استخدام مكتبة رؤية SpireCVيتم تحقيق الكشف الدقيق وتقدير موقع رموز الاستجابة السريعة. يمكن لـ GX40 إجراء هبوط موجه بدقة على رموز الاستجابة السريعة من ارتفاعات مختلفة. يتم محاذاة مركز كاميرا gimbal مع مركز رمز الاستجابة السريعة ضمن هامش خطأ يبلغ 30 سم.
- ارتفاع 5 أمتار، تكبير 1x
- ارتفاع 8 أمتار، تكبير 3.6x
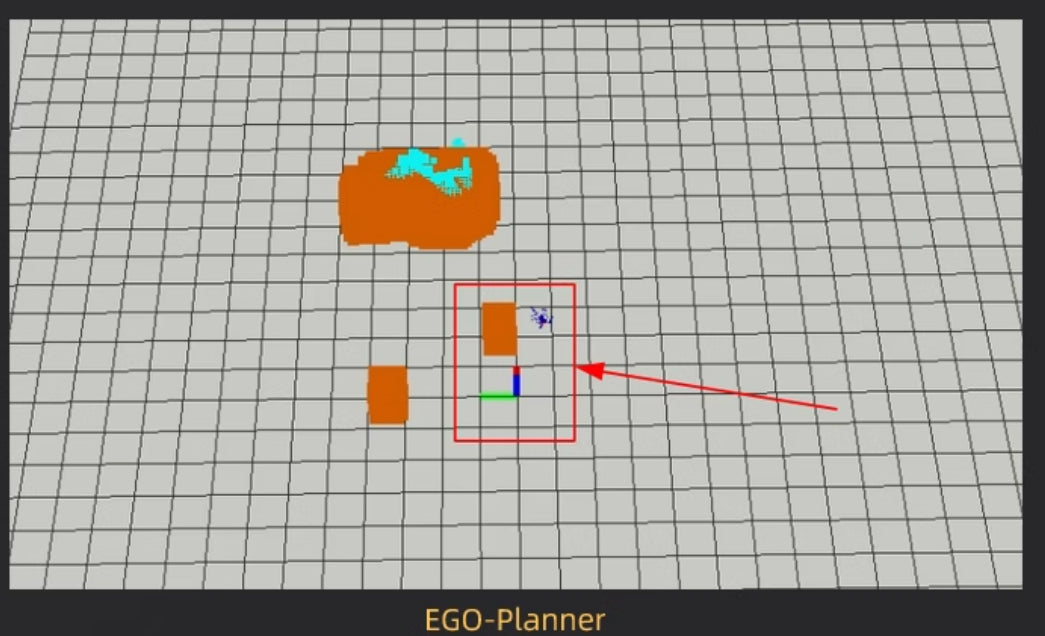
مخطط الأنا
يدعم خوارزمية تخطيط المسار EGO-Planner ويوفر خوارزمية رسم الخرائط Octomapعند دمجه مع محطة أرضية احترافية، فإنه يتيح تخطيط مسار ديناميكي ثلاثي الأبعاد مستقل.
تطبيقات التحكم في الطائرات بدون طيار المستقرة والموثوقة
تم تجهيز الطائرة بدون طيار P600 بمعدات RTK عالية الدقة، مما يحقق تحليقًا عالي الدقة في الهواء الطلق بدقة أفقية تصل إلى 1 سم ودقة رأسية تصل إلى 1.5 سم. جنبًا إلى جنب مع وحدة التحكم في نظام برمجي بروميثيوس، فهو يتيح التحكم الدقيق في الطائرة بدون طيار.
تعمل وحدة التحكم في الطائرة بدون طيار كـ "جسر" بين برامج الكمبيوتر والطائرة بدون طيار، وتوفر حالات تحكم متعددة مثل التحليق في الموضع الأولي والتحليق في الموضع الحالي والهبوط والحركة. وتشمل هذه ستة أوضاع تحكم: وضع النظام المعتاد، والسرعة، والتحكم المتكامل في الموضع والسرعة، ووضع التحكم في المسار. وفي المجموع، توفر سبعة أوضاع تحكم.

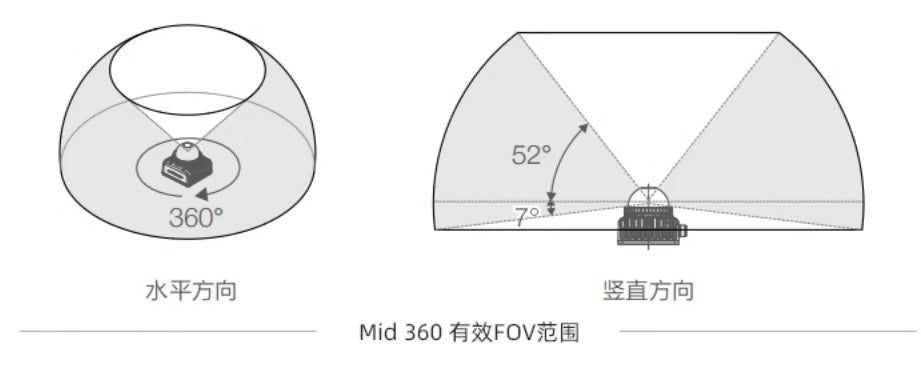
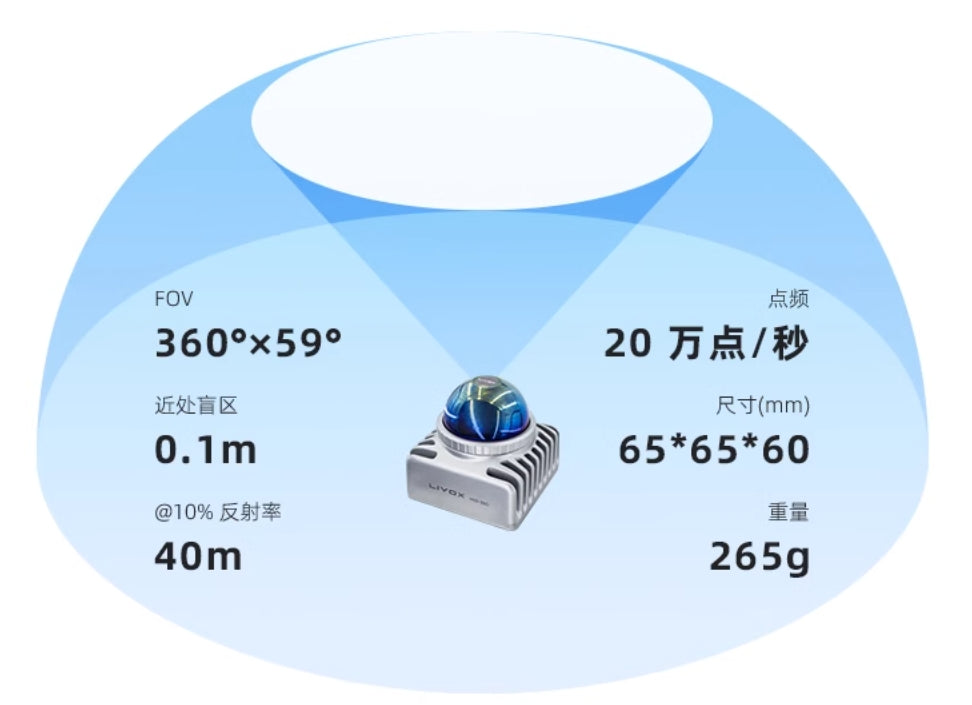
3D LiDAR منتصف 360
- منطقة عمياء منخفضة | مجال رؤية واسع | تطبيق متعدد السيناريوهات
ال منتصف 360 يتميز بـ مجال رؤية أفقي 360 درجة و أ أقصى مجال رؤية رأسي 59 درجةعندما تكون انعكاسية الجسم المستهدف 10%، يمكن أن يصل أقصى مدى للكشف إلى 40 مترا، ونطاق المنطقة العمياء صغير مثل 10 متريتكيف مع مختلف البيئات المعقدة مثل الإضاءة المنخفضة والإضاءة القوية.
مجهزة بوحدة Mid-360، طائرة بدون طيار P600 يحقق تغطية بانورامية للمنطقة العمياء، مما يضمن التشغيل السلس للطائرات بدون طيار عبر بيئات متعددة السيناريوهات.
- وصف الرسم البياني:
- الاتجاه الأفقي: 360 درجة
- الاتجاه الرأسي: مجال رؤية أقصى 52 درجة

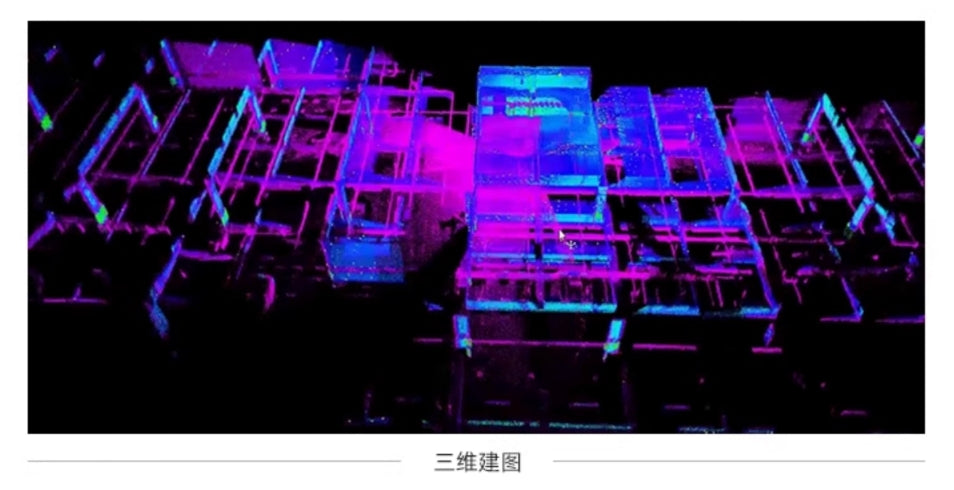
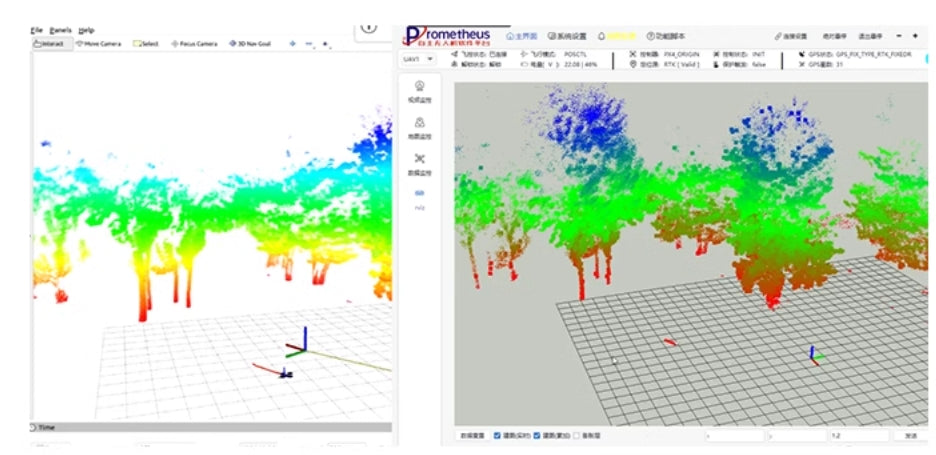
رسم خرائط بيئية ثلاثية الأبعاد سريعة ودقيقة
ال طائرة بدون طيار P600 تم تجهيز الطائرة بقدرات استشعار بيئية متقدمة، مما يسمح لها بجمع البيانات البيئية المحيطة بسرعة أثناء الطيران. تتم معالجة هذه البيانات في الوقت الفعلي لتوليد خريطة بيئية ثلاثية الأبعاد، مما يوفر وعيًا مكانيًا دقيقًا ودعمًا للملاحة لمختلف المهام.
تخطيط مسار سرب الأنا للملاحة وتجنب العوائق
ال ميد360 ينشر بيانات السحابة النقطية وبيانات الموقع، جنبًا إلى جنب مع خوارزمية تخطيط مسار EGO-Swarm، مما يعزز بشكل كبير قدرة الطائرة بدون طيار على التكيف بشكل مستقل مع التغيرات البيئية الديناميكية. يمكنها تحليل العوائق والاستجابة لها في الوقت الفعلي أثناء الحركة وضبط هدف التتبع ديناميكيًا بأقصى سرعة 2 متر/ثانيةويضمن هذا مرونة استثنائية وقابلية للتكيف في السيناريوهات التشغيلية غير المعروفة والمعقدة.
تعمل هذه الميزة على تحسين كفاءة مهام الطائرة بدون طيار بشكل كبير، مما يمكنها من إكمال مجموعة متنوعة من المهام بكفاءة ودقة
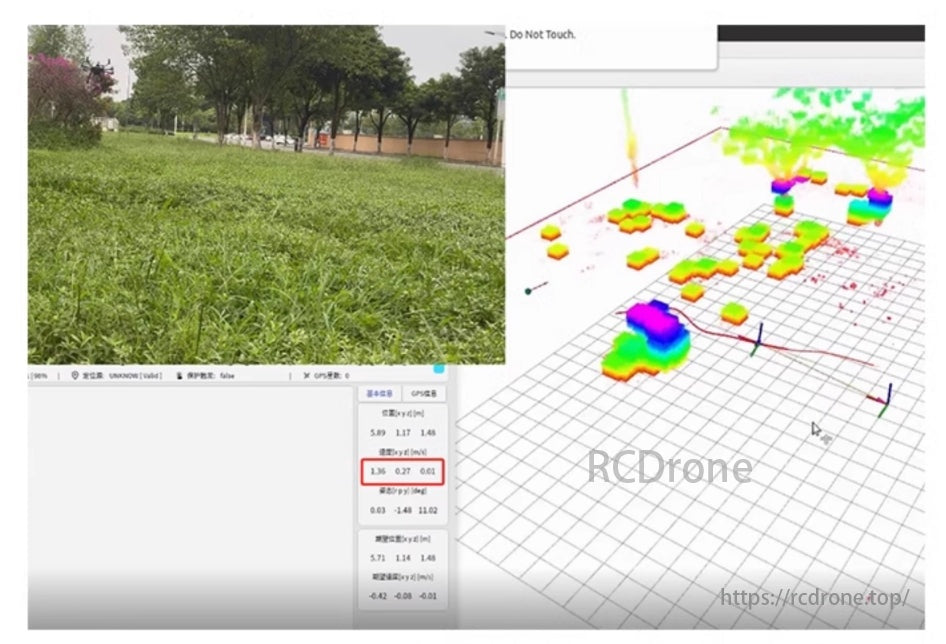
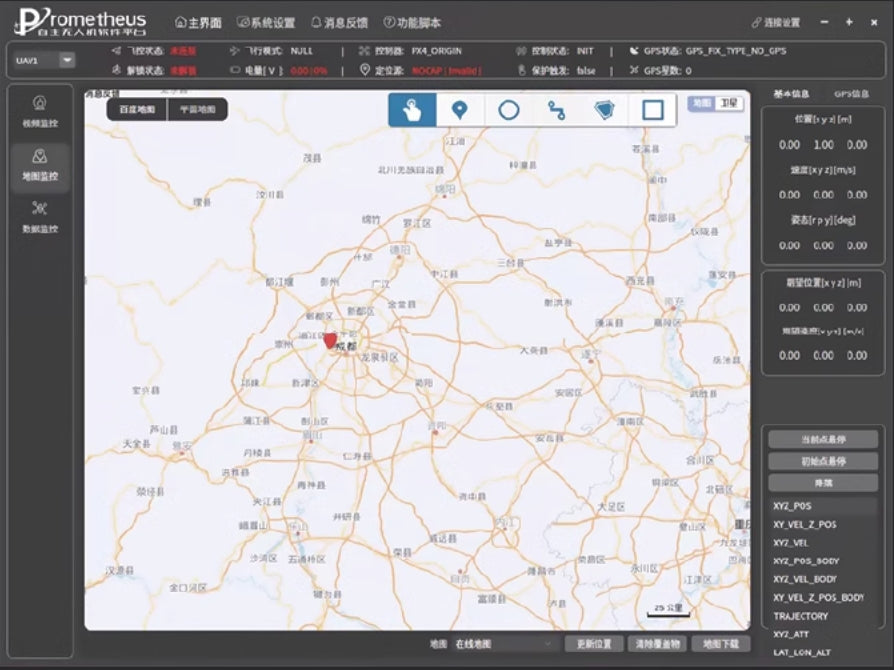
محطة بروميثيوس الأرضية الاحترافية للتفاعل مع الطائرات بدون طيار
- تفاعل المحطة الأرضية
يعرض هذا واجهة وقدرات التفاعل الخاصة بـ محطة بروميثيوس الأرضية الاحترافية، مما يتيح التواصل والتشغيل السلس مع الطائرة بدون طيار من خلال رسم الخرائط البيئية ثلاثية الأبعاد.
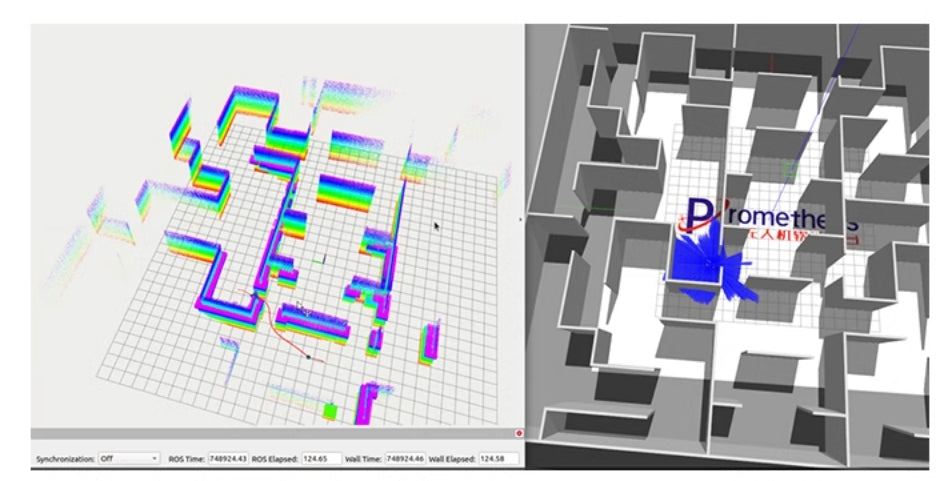
عرض توضيحي لوظيفة المحاكاة المتكاملة
- محاكاة ثلاثية الأبعاد لـ LiDAR SLAM وتخطيط مسار EGO-Swarm
يوضح هذا محاكاة 3D ليدار سلام و تخطيط مسار EGO-Swarm في بيئة منظمة، يتم عرض قدرات النظام في عرض توضيحي خاضع للرقابة.
مميزات الأجهزة
إطار الطائرة بدون طيار
ال كيدواي DP1000 تستخدم منصة الطائرات بدون طيار الصناعية FOC (التحكم الموجه نحو الحقل) نظام الطاقة، مما يسمح للمحرك بالدوران بثبات، مع ضوضاء منخفضة وكفاءة عالية واستجابة ديناميكية سريعة. يحقق نظام الطائرة بدون طيار بالكامل حالة "جاهزة للطيران" بجودة أجهزة ممتازة، مما يضمن أداء طيران مستقر. إنه يدعم قدرة تحمل طويلة جدًا (70 دقيقة بدون حمولة)، في حين أن طائرة بدون طيار P600 يتطلب تقريبا 24 دقيقة للاستقرار أثناء التموضع.

وحدة الحوسبة القوية
- وحدة الحوسبة Allspark Micro Edge، مجهزة بـ وحدة NVIDIA Orin NX، توفير قوة الحوسبة ذات الفاصلة العائمة 100 TOPS.
- حجم صغير، وخفيف الوزن، وتوافق قوي مع النظام، و الحوسبة عالية الأداء المعجلة بواسطة وحدة معالجة الرسوميات.
- تم تثبيت جميع بيئات التطوير مسبقًا، وجاهزة للاستخدام، مما يعزز كفاءة التطوير الثانوي.
- أبعاد: 102.5 ملم × 62.5 مم × 31 مم

وحدة التحكم في نقل الصور المتكاملة
أ جهاز تحكم عن بعد للطائرات بدون طيار الصناعية دمج البيانات والصورة والتحكم في واحد.
- نطاق التردد: 2.4-2.483 جيجاهرتز
- أقصى مسافة نقل: 30 كم
- جودة الصورة:1080 بكسل
- عمر البطارية:8-15 ساعة من التشغيل المستمر
أثناء تشغيل الطائرة بدون طيار، يمكن للمستخدمين مراقبة معلومات الطائرة بدون طيار في الوقت الفعلي، وعرض لقطات الكاميرا، والتحكم في الطائرة بدون طيار باستخدام عصا التحكم في نفس الوقت، مما يضمن تشغيل الطيران بشكل مرئي بالكامل.

RTK عالي الدقة بهوائي مزدوج
تم تجهيز الطائرة بدون طيار بـ وحدة تحديد المواقع RTK-GNSSيستخدم النظام تقنية تحديد المواقع التفاضلية السريعة بين الناقلات وخوارزميات قمع المسارات المتعددة لتوفير دقة تحديد المواقع على مستوى السنتيمتر للطائرات بدون طيار. ويمكنه تلقي بيانات RTCM في وقت واحد من محطات مرجعية أرضية متعددة، مما يدعم حسابات RTK الأساسية القصيرة والمتوسطة والطويلة.
مع تعدد اللغات المدمج واجهة المستخدم الرسومية للويبيتيح هذا الجهاز تكوينًا بدون عتبة وعرضًا مرئيًا للبيانات وعمليات الترقية. كما يتميز جهاز الاستقبال بواجهة تكوين صفحة ويب سهلة الاستخدام، مما يقلل بشكل كبير من الحاجز التشغيلي. كما يوفر واجهات غنية وقابلة للتكيف مع سيناريوهات التطبيق المختلفة، مما يوفر أداءً استثنائيًا في تحديد المواقع بدقة.

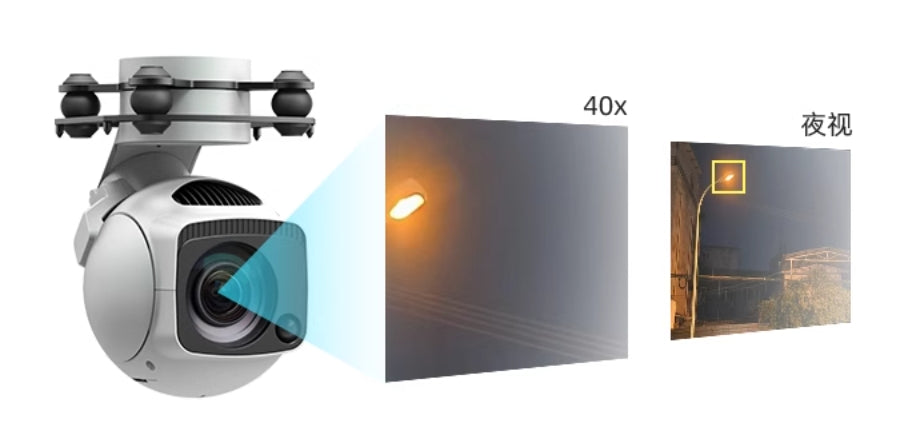
40x جيمبال بصري إلكتروني
مزود بمحور ثلاثي المحاور عالي الدقة غير متعامد، ويتميز بكاميرا ذات تكبير بصري 10x بدقة 8.29 ميجابكسل مع تقنية تكبير رقمية، مما يحقق تكبيرًا يصل إلى 40x. يمكنه إخراج 4K@30FPS videيتم بث البث عبر الشبكة. بالإضافة إلى ذلك، تم تجهيزه بوحدة إضاءة بالليزر، مما يتيح الحصول على صور واضحة حتى في البيئات المظلمة تمامًا.
جهاز LiDAR ثلاثي الأبعاد MID 360
يعد جهاز Mid-360 جهاز استشعار للكشف وتحديد المدى بالليزر فعالاً من حيث التكلفة وآمنًا وموثوقًا به. ويُستخدم على نطاق واسع في مجالات مثل الروبوتات اللوجستية والروبوتات الصناعية والمدن الذكية، ويدعم وظائف مثل رسم الخرائط وتحديد المواقع والتعريف وتجنب العوائق. ويمكن لجهاز Mid-360 اكتشاف الأشياء على مسافة قريبة تصل إلى 0.1 متر وعلى مسافة تصل إلى 100 متر. ويتميز بحجمه الصغير وحقل الرؤية الواسع والدقة العالية والموثوقية العالية ووحدة قياس القصور الذاتي المتكاملة.
تحديد:
- مجال الرؤية:360° × 59°
- الحد الأدنى لمسافة الكشف: 0.1 متر
- المدى (@10% انعكاسية): 40 م
- تردد النقطة: 200000 نقطة/ثانية
- الأبعاد (مم):65 × 65 × 60
- وزن: 265 جرام
مميزات البرنامج
نظام برمجي Prometheus V2
تعتمد منصة التطوير على ROS وإطار عمل Prometheus مفتوح المصدر، مما يوفر وظائف غنية وعددًا كبيرًا من واجهات التطوير الثانوية للتخصيص الفعّال. كما توفر واجهات لبيانات حالة الطائرة بدون طيار والمستشعر، بما في ذلك معلومات الموقع وأوضاع الطيران وحالة البطارية ووحدة قياس القصور الذاتي. بالإضافة إلى ذلك، توفر واجهات تحكم للموضع والسرعة والتسارع والموقف، بالإضافة إلى برامج نموذجية لاستخدام واجهة التطوير. تتضمن الطائرة بدون طيار أيضًا وظائف فحص سلامة الطيران المدمجة (وليس تجنب العوائق)، مما يتيح الهبوط التلقائي في المواقف غير الطبيعية لتقليل مخاطر الاصطدام، مما يجعل التطوير أكثر أمانًا.

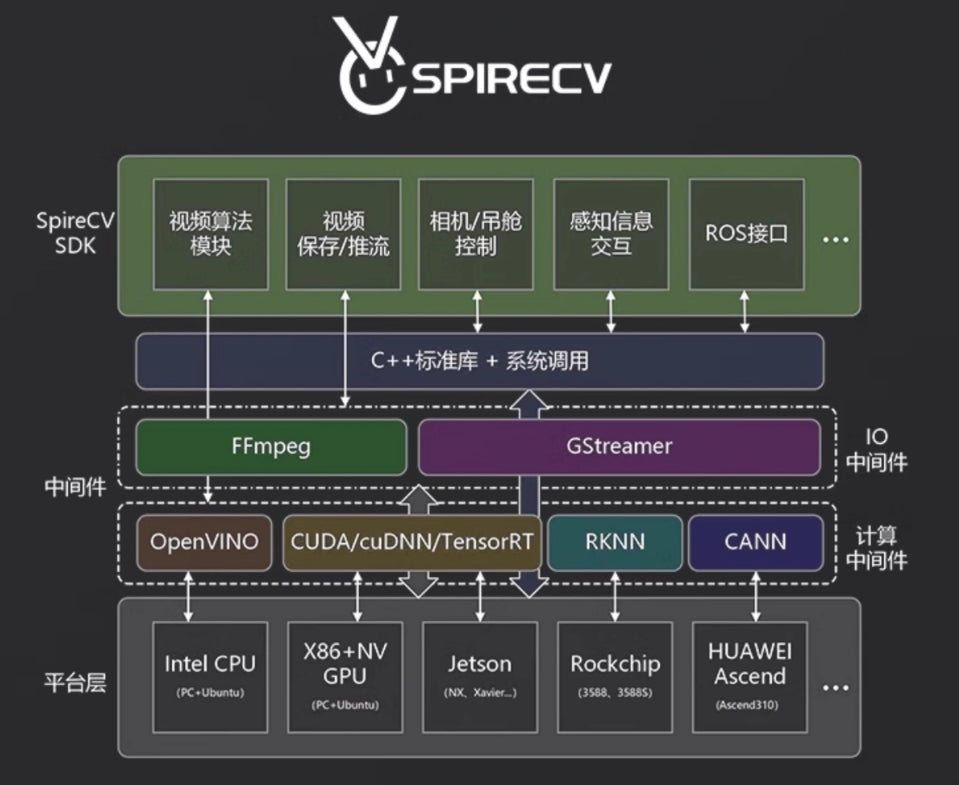
مكتبة رؤية SpireCV
استنادًا إلى مكتبة SpireCV للرؤية، تعد هذه مجموعة أدوات تطوير برمجيات معالجة الصور في الوقت الفعلي مصممة خصيصًا للأنظمة الذكية غير المأهولة. تشمل ميزاتها الرئيسية التحكم في المحور/الكاميرا وتخزين الفيديو والبث واكتشاف الهدف والتعرف عليه وتتبعه. تهدف إلى تزويد مطوري الأنظمة الذكية غير المأهولة بإمكانيات معالجة الرؤية عالية الأداء وموثوقة للغاية وبسيطة وغنية بالميزات. يدعم هذا النموذج تدريب YOLO لوظيفة تتبع المركبات بالنقر والنقر.
نظام محطة بروميثيوس الأرضية
محطة بروميثيوس الأرضية عبارة عن واجهة بين الإنسان والآلة تم تطويرها باستخدام Qt، استنادًا إلى نظام بروميثيوس. وهي تستخدم اتصالات TCP/UDP لتبسيط تكوين الاتصالات بين الآلات المتعددة. تتيح المحطة الأرضية للمستخدمين تكرار وظائف مختلفة لنظام بروميثيوس بسرعة، مما يوفر مراقبة في الوقت الفعلي لحالة الطائرات بدون طيار، بالإضافة إلى ميزات مثل عمليات الإقلاع والهبوط والتحكم في الموقع بنقرة واحدة.
التطبيقات
-
البحث العلمي وتطوير الذكاء الاصطناعي
- اختبار خوارزمية الذكاء الاصطناعي
- تحليل بيانات الاستشعار المتقدمة
- معالجة الصور وتتبعها في الوقت الفعلي
-
التطبيقات الصناعية
- رسم الخرائط والملاحة بدقة في البيئات المعقدة
- اكتشاف العوائق وتجنبها في الخدمات اللوجستية والتخزين
- فحص البنية التحتية مثل خطوط الكهرباء وخطوط الأنابيب
-
الاستخدامات الأكاديمية والتعليمية
- البرمجة الثانوية لأبحاث الذكاء الاصطناعي القائمة على ROS
- العروض والتجارب المعملية
- التدريب على الملاحة بالطائرات بدون طيار ذاتية التشغيل
-
حلول المدينة الذكية
- إعادة بناء مكانية ثلاثية الأبعاد للتخطيط الحضري
- مراقبة وإدارة حركة المرور
- المراقبة والتحليل البيئي
-
التطوير المخصص
- النمذجة الأولية للتطبيقات الصناعية المتخصصة
- اختبار ودمج مكونات الأجهزة والبرامج الجديدة
-
الاستجابة للكوارث والرصد البيئي
- التفتيش والمراقبة الجوية في المناطق المنكوبة بالكوارث
- جمع البيانات البيئية لأغراض البحث وصنع السياسات
يوفر جهاز P600 مرونة ووظائف لا مثيل لها، مما يتيح للباحثين والمهندسين والمطورين تنفيذ مشاريع معقدة عبر سيناريوهات متنوعة.







