SU17-Forschungsdrohne – PX4-Open-Source-Industriedrohnenentwicklung mit MID-360 LiDAR, Quad-Kamera-SLAM, EGO-Swarm
SU17-Forschungsdrohne – PX4-Open-Source-Industriedrohnenentwicklung mit MID-360 LiDAR, Quad-Kamera-SLAM, EGO-Swarm
RCDrone
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Die SU17 Research Drone ist ein Hochleistungs-Quadrocopter mit einem 6000mAh Akku, MID-360 LiDAR für 3D-Mapping, SLAM-System mit vier Kameras zur präzisen Lokalisierung und integrierte GPS+GLONASS-PositionierungMit einem Startgewicht von 2,3 kg und ein Nutzlastkapazität von 200 gbietet es 21 Minuten Flugzeit im visuellen Positionierungsmodus. Angetrieben von der Prometheus-Software unterstützt es Zielerkennung, Pfadplanung und autonome Navigation und ist damit ein Industriequalität Lösung für Forschung und Innovation.
Hardwareparameter
Flugzeug
| Parameter | Beschreibung |
|---|---|
| Flugzeugtyp | Quadrocopter |
| Abfluggewicht (ca.) | 2,3 kg (mit Schutzhülle und Batterie) |
| Diagonale Entfernung | 320 mm |
| Maße | Länge: 442 mm, Breite: 388 mm, Höhe: 174 mm (ohne Schutzhülle) |
| Maximale Nutzlast | 200 g |
| Schwebeflugzeit | Ca. 13 min (bei Hover bei 100%, nicht unter 0%), visuelle Positionierung: 21 min |
| Schwebegenauigkeit | GPS: Vertikal ±1,5 m, Horizontal ±2,0 m |
| 3D-LiDAR-SLAM: Vertikal ±0,08 m, Horizontal ±0,08 m | |
| Visuelles SLAM mit 4 Kameras: Vertikal ±0,05 m, Horizontal ±0,05 m | |
| Windwiderstandsstufe | Stufe 4 |
| Betriebstemperatur | -10°C bis 40°C |
| Haupt-MCU-Chip | STM32H743 |
| IMU | ICM42688/BMI088 |
| Barometer | MS5611 |
| Kompass | QMC5883L |
| Schnittstelle | USB Typ C |
Bordcomputer
| Parameter | Beschreibung |
|---|---|
| Prozessor | Intel Core i5-8365U |
| Speicherkapazität | 8 GB |
| Speicherfrequenz | LPDDR3@2133MHz |
| Lagerung | 256 GB NVMe SSD |
| Netzwerkport | Baidu Apollo Ethernet X2, 12V@3A power Versorgung, unterstützt IEEE 1588-2008 (PTP v2) |
| Serielle Schnittstelle | TTL-Serieller Anschluss X2, 5V/3.3V@500mA power Versorgung |
| USB | Typ C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
Akku
| Parameter | Beschreibung |
|---|---|
| Modell | SU17-L |
| Akku-Typ | Hochdruck-Lithium-Polymer-Batterie |
| Nennspannung | 26,4 V (max.), 21 V (min.) |
| Speicherspannung | 22,8 V (typisch) |
| Nennkapazität | Akku mit 6000 mAh |
| Gewicht | 680 g |
| Maße | Länge: 85,2 mm, Breite: 86.5 mm, Höhe: 135 mm |
Fernbedienung
| Parameter | Beschreibung |
|---|---|
| Modell | QE-2 |
| Kanäle | 8 |
| Sendeleistung | 18 bis 20 dBm |
| Gewicht | 294,1 g |
Kardangelenk
| Parameter | Beschreibung |
|---|---|
| Kontrollierbarer Winkel | -90° ~ 30° (Neigungsachse) |
| Streaming-Protokoll | RTSP (Standard) |
| Kodierungsformat | H.264 |
| Auflösung | 1080P bei 25 Bildern pro Sekunde |
| Diagonales Sichtfeld (D) | 120° |
| Vertikales Sichtfeld (V) | 54° |
| Horizontales Sichtfeld (H) | 95° |
Bildübertragung
| Parameter | Beschreibung |
|---|---|
| Betriebsfrequenz | 2,4 GHz |
| Sendeleistung | 18 dBm |
| Kommunikationsreichweite | 3 km (keine Störungen, kein Hindernis) |
| Bildbereich | 1 km (minimale Störungen, kein Hindernis) |
| Maximale Bandbreite | 40 Mbit/s |
Vierfache Tiefenkamera
| Parameter | Beschreibung |
|---|---|
| Vision-Beschleuniger | Intel Movidius Myriad X VPU |
| Maximale Auflösung | 1296 x 816 |
| Maximale Bildfrequenz | 1280 x 800 bei 120 fps |
| Verschlusstyp | Global Shutter |
| Kodierungsformat | 8/10-Bit-Einzelstream |
| Sichtfeld | 150° diagonales Sichtfeld, 127,4° horizontales Sichtfeld, 79,7° vertikales Sichtfeld |
| Anzahl der Sensoren | 4 (2 vorne + 2 hinten) |
| IMU | BMI270 |
GNSS
| Parameter | Beschreibung |
|---|---|
| Horizontale Genauigkeit | 1,5 m CEP (mit SBAS) |
| Geschwindigkeitsgenauigkeit | 0,05 m/s |
| Betriebsart | GPS + GLONASS + BDS + GALILEO + SBAS + QZSS |
Ladegerät
| Parameter | Beschreibung |
|---|---|
| Modell | LK150-2640500 |
| AC-Eingangsspannung | 100 V bis 240 V |
| DC-Eingangsspannung | 26.4V |
| Gewicht | 460 g |
| Ladestrom | 5A |
3D-LiDAR
| Parameter | Beschreibung |
|---|---|
| Modell | MITTE-360 |
| Laserwellenlänge | 905 nm |
| Messbereich | 40 m bei 10 % Reflektivität |
| Sichtfeld | Horizontal 360°, Vertikal -7° ~ 52° |
| Mindestreichweite | 0,1 m |
| Punktfrequenz | 10 Hz (typisch) |
| Punktausgabe | 200.000 Punkte/s |
| Datenschnittstelle | 100 BASE-TX Ethernet |
| Datensynchronisation | IEEE 1588-2008 (PTP v2), GPS |
| Eingebaute IMU | ICM40609 |
| Versorgungsspannung | 7 bis 27 V |
| Maße | 65 mm (B) x 65 mm (T) x 60 mm (H) |
| Gewicht | 115 g |
| Betriebstemperatur | -20°C bis 55°C |
Softwareparameter
Bordcomputer
| Parameter | Beschreibung |
|---|---|
| Modell | Intel Core i5-8365U |
| System | Ubuntu 20.04 |
| Benutzername | amov |
| Passwort | amov |
| ROS | noetisch |
| OpenCV | 4.7.0 |
| Visuelles Positionierungssystem | BSA_SLAM V1 |
Prometheus Software
| Parameter | Beschreibung |
|---|---|
| Version | Version 2.0 |
| PrometheusGroundStation-System | v1.24.11.27 (Endgültige Version basierend auf dem Wiki-Release-Protokoll) |
Details
SU17 Forschungsausgabe
Forschungsdrohne in Industriequalität
- Optionales 3D-LiDAR: Ermöglicht die Kartierung, Positionierung und Vermeidung von Navigationshindernissen.
- Prometheus Autonome Drohnensoftware: Zahlreiche Demos zum schnellen Erlernen der Drohnensteuerung.
- Flugplattform in Industriequalität: Stabil und offen, setzt einen neuen Standard für die Leistung von Forschungsdrohnen.

Hauptmerkmale
Die SU17-Forschung Drohnen-Entwicklungsplattform (als SU17 bezeichnet) verwendet ein integriertes Design, das Flugsteuerungen, Bordcomputer, SLAM-Module mit vier Kameras, Cloud-Kameras und Bildübertragungsmodule für eine hochgradige Integration umfasst und die Hardwarestabilität und -zuverlässigkeit deutlich verbessert. Ausgestattet mit der autonomen Drohnensoftware Prometheus unterstützt der SU17 Funktionen wie Zielerkennung, Verfolgung und Pfadplanung für verschiedene Flugsteuerungsszenarien.
Es integriert optional den MID-360 3D LiDAR, kombiniert mit dem FAST-LIO-Algorithmus, um 3D LiDAR SLAM zu erreichen und bietet präzise Umgebungssensoren und Positionsinformationen. In Verbindung mit dem EGO-Swarm-Pfadplanungsalgorithmus ermöglicht es effizientes Echtzeit-3D-Mapping und Hindernisvermeidung in komplexen Umgebungen.




Prometheus V2 Softwaresystem
Die Entwicklungsplattform basiert auf dem Open-Source-Framework ROS und Prometheus und bietet umfangreiche Funktionen und umfangreiche sekundäre Entwicklungs-APIs für eine effiziente Neuprogrammierung. Sie bietet Zugriff auf Positionsinformationen, Flugmodi, Batteriestatus, IMU-Daten und andere Schnittstellen für Drohnenstatus- und Sensordaten sowie Steuerschnittstellen für Position, Geschwindigkeit, Beschleunigung und Fluglage.
Darüber hinaus enthält es Anwendungsbeispiele für zugehörige APIs. Darüber hinaus verfügt die Drohne über Sicherheitsprüffunktionen für den Flugbetrieb (Anti-Crash), die einen automatischen Abstieg unter anormalen Bedingungen ermöglichen, das Absturzrisiko verringern und einen sichereren Entwicklungsprozess gewährleisten.

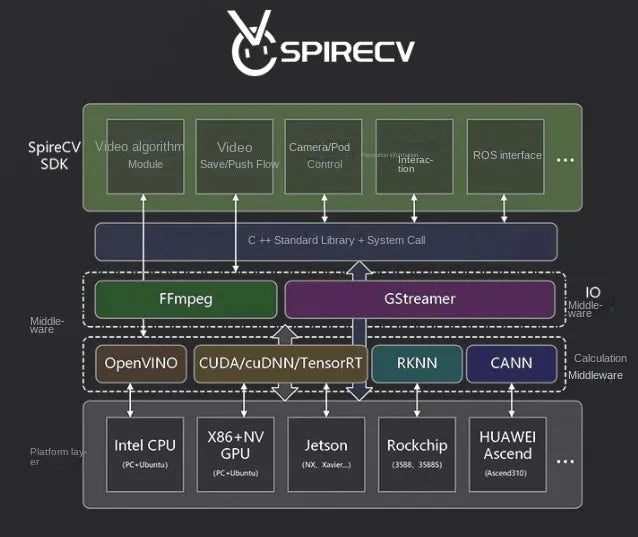
SpireCV Vision-Bibliothek
Die SpireCV Vision Library ist ein SDK zur Echtzeit-Bildverarbeitung, das speziell für intelligente UAV-Systeme entwickelt wurde. Es bietet Funktionen wie Kardan- und Kamerasteuerung, Videospeicherung und -streaming, Zielerkennung, -erkennung und -verfolgung.
Dieses SDK soll Entwicklern intelligenter UAV-Systeme hohe Leistung, Zuverlässigkeit und eine optimierte Schnittstelle bieten. Mit einer funktionsreichen visuellen Verarbeitungslösung ermöglicht es Entwicklern die effiziente Implementierung verschiedener komplexer visueller Anwendungen.
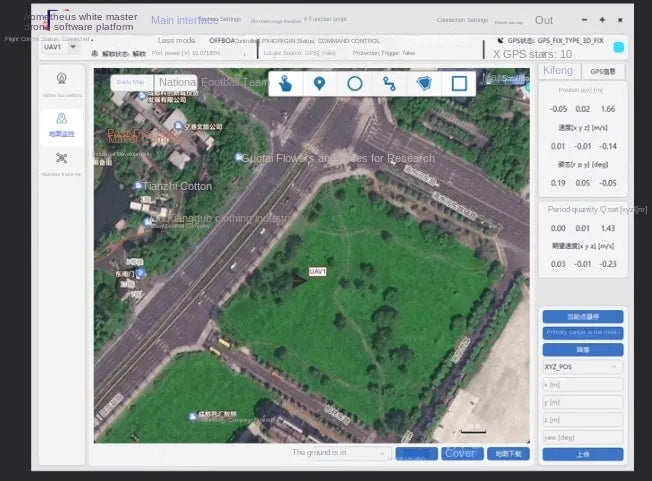
Bodenstation Prometheus
Die Prometheus Ground Station ist eine Mensch-Drohne-Interaktionsschnittstelle, die auf Basis des Prometheus-Systems entwickelt und mit Qt-Technologie erstellt wurde. Sie ermöglicht eine schnelle Replikation der Funktionen des Prometheus-Systems und bietet Echtzeitüberwachung und 3D-Visualisierung des Drohnenstatus und der Steuerungsdaten.
Über die Bodenstation können Benutzer Befehle wie Abheben mit einem Klick, Schweben an der aktuellen Position, Landen und Positionskontrolle ausführen. Darüber hinaus unterstützt das System benutzerdefinierte Funktionstasten zum Starten benutzerdefinierter Skripte oder Senden benutzerdefinierter Nachrichten, wodurch der Komfort, die Effizienz und die Skalierbarkeit von Benutzervorgängen erheblich verbessert werden.
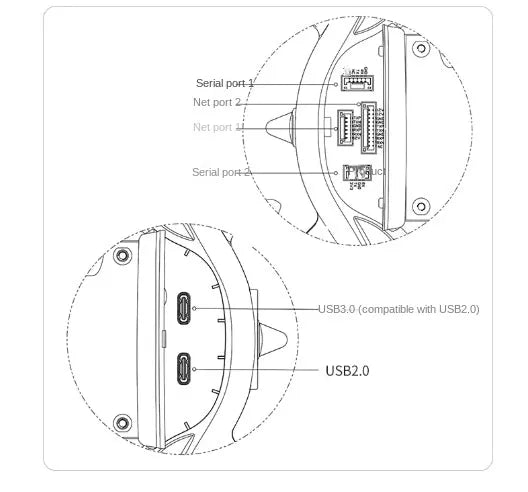
Leistungsstarke Erweiterung
Hardware-Erweiterungsports
-
Serieller Anschluss 1
-
Serieller Anschluss 2
-
Netzwerkport 1
-
Netzwerkanschluss 2
-
USB-Anschlüsse:
- USB 3.0 (kompatibel mit USB 2.0)
- USB 2.0
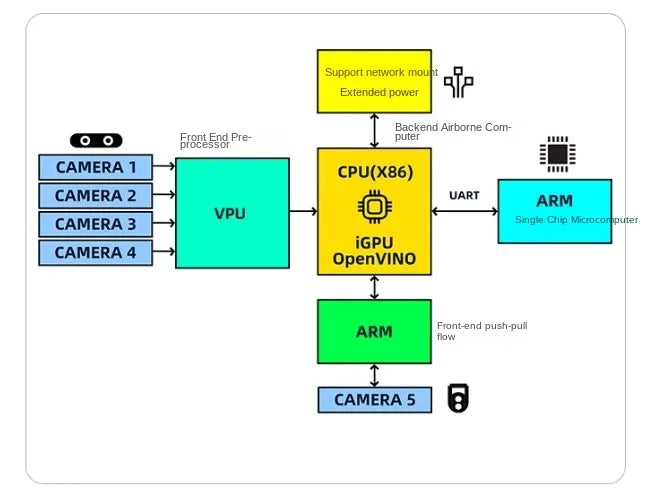
Hardware-Framework
Das Bild veranschaulicht die Hardwarearchitektur der SU17-Drohne und hebt die Integration verschiedener Komponenten zur erweiterten Datenverarbeitung und Systemsteuerung hervor:
-
Kameras (Kamera 1-4):
Verbunden mit einem VPU (Bildverarbeitungseinheit) für die Front-End-Vorverarbeitung. -
VPU:
Verarbeitet visuelle Daten von mehreren Kameras und leitet sie an die Verarbeitungseinheiten weiter. -
Zentralprozessor (X86) mit iGPU und OpenVINO:
Dient als primäre Recheneinheit für die Backend-Verarbeitung und unterstützt netzwerkverbundene Erweiterungsmöglichkeiten für verbesserte Rechenleistung. -
ARM Single-Chip-Mikrocontroller:
Interagiert mit der CPU über eine UART-Schnittstelle für zusätzliche Steuerungsfunktionen. -
Front-End-Pipelining und Kamera 5:
Verwaltet von einem dedizierten ARM-Prozessor zur weiteren Datenoptimierung.
Dieses Framework integriert mehrere Verarbeitungseinheiten und unterstützt Bildanalyse in Echtzeit, erweiterte Rechenaufgaben und eine nahtlose Kommunikation zwischen Hardwarekomponenten. Es gewährleistet die effiziente Abwicklung komplexer Vorgänge in Forschungs- und Entwicklungsanwendungen.
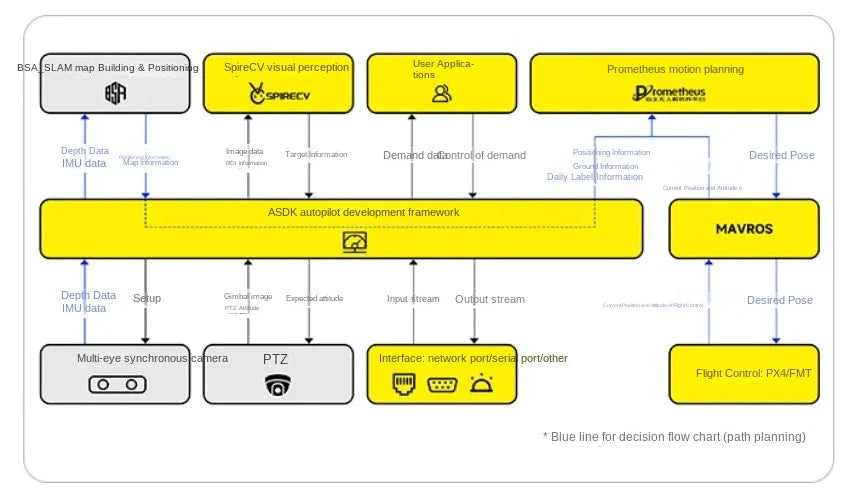
Software Framework
Das Diagramm veranschaulicht die Softwarearchitektur der SU17-Drohne und hebt die Integration verschiedener Systeme für autonome Funktionalität hervor:
-
BSA_SLAM (Mapping und Lokalisierung):
- Bietet räumliche Kartierungs- und Positionierungsdaten.
- Integriert Tiefen- und IMU-Sensoreingänge für eine genaue Umgebungswahrnehmung.
-
SpireCV Bildwahrnehmung:
- Verarbeitet visuelle Daten, einschließlich Objekterkennung, ROI-Informationen und Zielverfolgung.
-
Benutzeranwendungen:
- Schnittstellen für benutzergesteuerte Aufgaben wie Datenvisualisierung und Befehlseingabe.
-
Prometheus Bewegungsplanung:
- Bewältigt die Flugbahnplanung unter Verwendung von Positions-, Geschwindigkeits- und Zieldaten.
-
ASDK-Framework für autonomes Fahren:
- Dient als zentrale Verarbeitungsschicht und verwaltet den Datenfluss zwischen Sensoren, Kameras, Cloud-Modulen und externen Schnittstellen.
- Unterstützt mehrere Eingabe-/Ausgabekanäle (z. B. Netzwerkports, serielle Ports).
-
MAVROS:
- Kommuniziert mit Flugsteuerungssystemen (PX4/FMT) zur Flugzustands- und Positionssteuerung.
-
Cloud-Modul und Multi-Sync-Kameras:
- Integriert Cloud-basierte Daten für erweiterte Verarbeitung.
- Synchronisiert visuelle Eingaben für hochpräzise Operationen.
Blaue Linien: Entscheidungspfade für die Trajektorienplanung darstellen.
Diese Architektur weist ein modulares, erweiterbares Design auf, das eine nahtlose Kommunikation zwischen verschiedenen Hardware- und Softwarekomponenten für einen robusten Drohnenbetrieb ermöglicht.
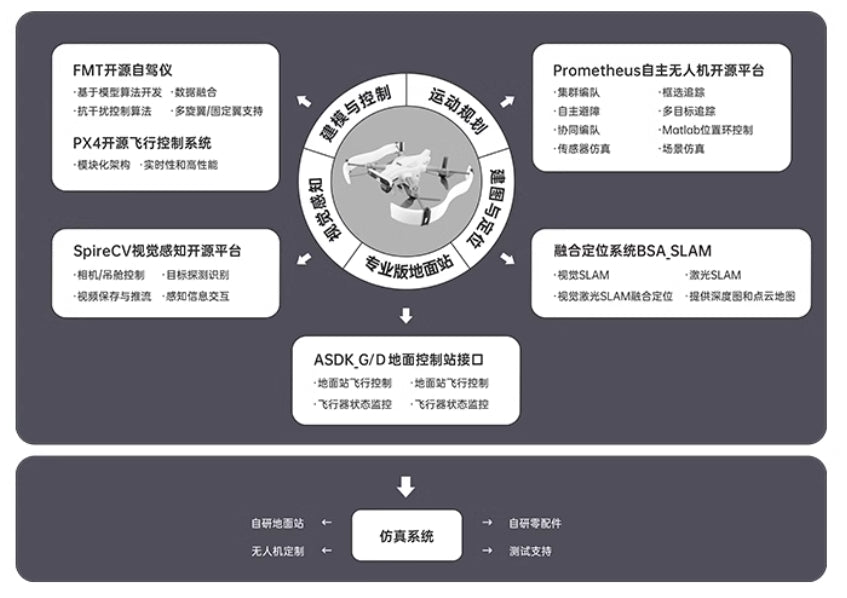
Intelligente Offenheit: Integrierte UAV-Systemlösung
Das Diagramm stellt eine umfassende und offene Architektur für Drohnensysteme dar, wobei der Schwerpunkt auf der Modularität und Integration verschiedener Komponenten liegt:
-
Kernkomponenten:
- FMT Open-Source-Autopilot: Bietet zuverlässige Flugsteuerung basierend auf modularer Entwicklung und unterstützt unterschiedliche Umgebungen und Datenintegration.
- PX4 Flugsteuerungssystem: Gewährleistet Stabilität und unterstützt erweiterte modulare Anpassung.
- SpireCV Vision Perception-Plattform: Konzentriert sich auf die Bildverarbeitung, einschließlich Objekterkennung, Verfolgung und Echtzeit-Videostreaming.
-
Wichtige Rahmenbedingungen:
- Autonome UAV-Plattform Prometheus: Beinhaltet die Steuerung mehrerer Drohnen, Bewegungsplanung, kollaborative Navigation und reale Simulationen.
- BSA_SLAM-System: Kombiniert visionbasiertes SLAM und LiDAR-basiertes SLAM für präzise Positionierung und Kartierung.
- ASDK G/D-Bodenstations-Steuerschnittstelle: Ermöglicht eine nahtlose Kommunikation zwischen Bodenstationen und UAVs zur Überwachung und Anpassung in Echtzeit.
-
Workflow-Integration:
- Hebt Prozesse wie Bewegungsplanung, Umgebungskartierung und autonome Navigation hervor.
- Integration mit professionellen Bodenstationen zur Flugbahnkontrolle, Hindernisvermeidung und Echtzeit-Datenverwaltung.
-
Simulationsunterstützung:
- Enthält ein Simulationssystem für autonome Missionstests, UAV-Steuerung und Komponentenvalidierung.
Dieses System stellt eine hochmoderne Lösung für die Entwicklung autonomer UAVs mit skalierbaren Funktionen für Forschung, Anwendung und Tests in verschiedenen Szenarien dar.
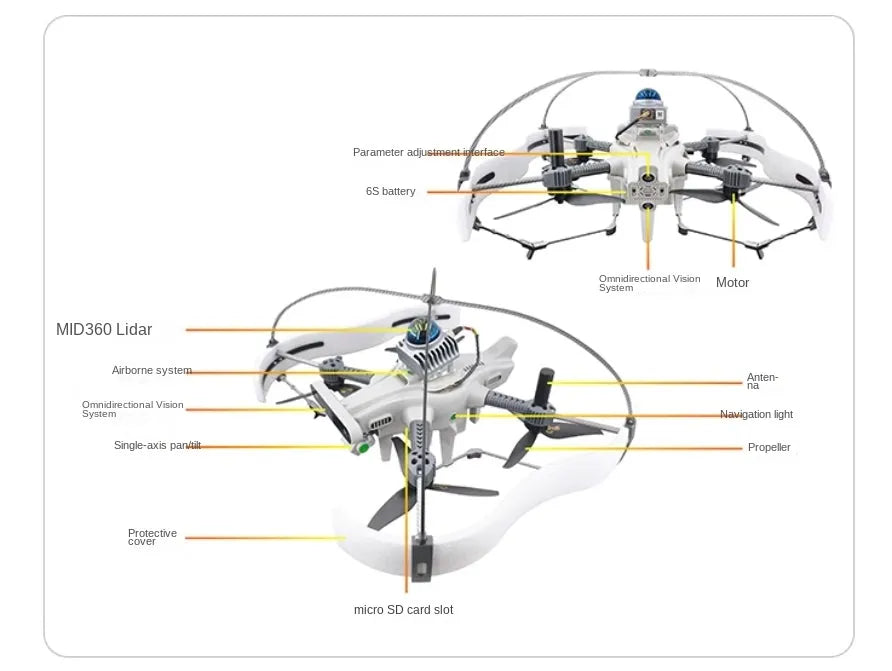
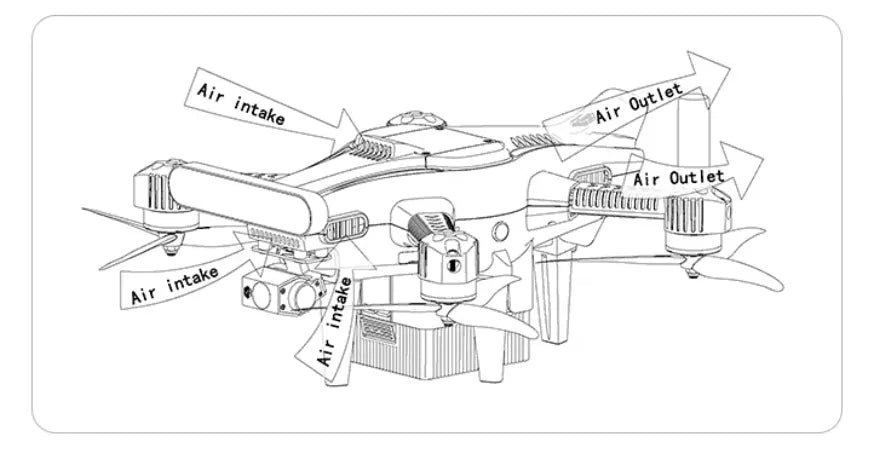
die Strukturkomponenten der Forschungsdrohne SU17, die ihre Stabilität und ihr fortschrittliches Design hervorheben. Zu den wichtigsten Merkmalen gehören die MID360 LiDAR für eine präzise Kartierung, Omnidirektionales Sichtsystem für eine umfassende Umweltwahrnehmung, einachsige kardanische Aufhängung für eine stabile Bildgebung und eine robuste 6S Akku für erweiterte Leistung. Weitere wichtige Komponenten sind die Propellersystem, Antenne, Navigationslichterund ein Micro-SD-Kartensteckplatz zur Datenspeicherung. Das Design integriert modernste Hardware und gewährleistet Zuverlässigkeit und hohe Leistung für verschiedene Forschungsanwendungen.
Related Collections