








کیت توسعه پهپاد مونتاژ CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Industrial Source-Open-Source Programmable Drone Kit با قفسه ضد برخورد
کیت توسعه پهپاد مونتاژ CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Industrial Source-Open-Source Programmable Drone Kit با قفسه ضد برخورد
RCDrone
در دسترس بودن پیکاپ بارگیری نشد
نمای کلی
کیت توسعه پهپاد مونتاژ CQ230 یک مجموعه فشرده و منبع باز است پهپاد DIY پلت فرمی که توسط Raspberry Pi 4B و Pixhawk کنترلر پرواز این پهپاد با فاصله بین دو محور 230 میلی متری، قاب ضد برخورد و سیستم قدرت 4S (16.8 ولت)، برای یادگیری و آزمایش ویژگی های قابل برنامه ریزی منبع باز ایده آل است. این پلتفرم به طور کامل برای کارهایی مانند ناوبری نقطهی راه، نظارت بر دادهها، و پخش ویدیوی بیدرنگ مجهز است، که آن را به یک انتخاب عالی برای توسعهدهندگان و مبتدیان تبدیل میکند.
ویژگی های کلیدی
- طراحی فشرده: پهپاد با ابعاد 360 در 360 در 300 میلی متر، برای فضاهای کوچک ایده آل است.
- قفسه ضد برخورد: قاب ضد برخورد کامل فیبر کربن دوام و محافظت را تضمین می کند.
- ادغام Raspberry Pi 4B: با Ubuntu 20.04 برای عملکرد و توسعه روان بهبود یافته است.
- چارچوب منبع باز: ارائه شده توسط آردوپایلوت، از Dronekit، MAVLink و ROS پشتیبانی می کند.
- قابل برنامه ریزی وظایف: قابلیت ناوبری مستقل، نظارت بر داده ها در زمان واقعی و پردازش بصری.
- ناوبری نقطه راه: مسیرها را با دقت مبتنی بر GPS تنظیم کنید.
- انتقال داده ها در زمان واقعی: انتقال داده با وای فای به ایستگاه های زمینی.
- ناوبری بصری: سیستم های دوربین دوگانه برای ناوبری دقیق داخل ساختمان و جلوگیری از موانع.
- کنترل های قابل برنامه ریزی: از Dronekit-Python برای ایجاد دستورات پروازی سفارشی استفاده کنید.
- شبیه سازی سیستم: ترکیب شبیه سازی SITL برای آزمایش یکپارچه عملکرد.
مشخصات
| پارامتر | جزئیات |
|---|---|
| مدل | CQ230 |
| فاصله بین دو محور | 230 میلی متر |
| باتری | 4S (16.8V) |
| زمان پرواز | 7 دقیقه |
| ظرفیت بار | 200 گرم |
| مقاومت در برابر باد | سطح 3-4 |
| حداکثر سرعت | 20 کیلومتر در ساعت |
| حداکثر ارتفاع پرواز | 120 متر |
| دقت موقعیت یابی | 2-3 متر (GPS) |
| وزن | 612 گرم |
| محدوده کنترل از راه دور | 700 متر |
بسته
نسخه پایه
- کنترلر پرواز Pixhawk 2.4.8 ×1
- GPS M8N ×1
- ماژول برق Ledi MINI PIX ×1
- CUAV WiFi Telemetry ×1
- 30A ESC ×4
- پروانه 5045 ×4
- قاب CQ230 ×1
- شارژر تعادل A400 ×1
- باتری 4S 2300 میلی آمپر ساعت × 1
- 2205 موتور ×4
- کنترل از راه دور FS-i6 × 1
- زنگ هشدار BB ×1
- ماژول جریان نوری MF-01 ×1
نسخه بصری
- Pixhawk 2.4.8 شرکت پروازترولر ×1
- GPS M8N ×1
- ماژول برق Ledi MINI PIX ×1
- دوربین CS × 1
- 30A ESC ×4
- پروانه 5045 ×4
- قاب CQ230 ×1
- زنگ هشدار BB ×1
- ماژول جریان نوری MF-01 ×1
- شارژر تعادل A400 ×1
- باتری 4S 2300 میلی آمپر ساعت × 1
- 2205 موتور ×4
- کنترل از راه دور FS-i6 ×1
- رایانه داخلی Raspi 4B-4G × 1 مجموعه
- دوربین بصری T265 × 1
برنامه های کاربردی
- تحویل: وسایل سبک وزن را به طور موثر حمل کنید.
- توسعه آموزشی: ایده آل برای دانش آموزان و محققان برای کشف سیستم های پهپاد.
- پردازش بصری: از OpenCV برای پخش و تحلیل ویدیوی پیشرفته استفاده کنید.
- آزمایشات ناوبری: ردیابی موقعیت و پرواز خودران مبتنی بر GPS را آزمایش کنید.
یادداشت های اضافی
- این سیستم شامل Ubuntu 20.04 برای یک رابط برنامه نویسی پیشرفته است.
- اکوسیستم قوی Ardupilot مقیاس پذیری و تطبیق پذیری را در برنامه های پهپاد تضمین می کند.
- یک بسته آموزشی کامل با آموزش های ارائه شده برای مبتدیان و حرفه ای ها.
جزئیات
سیستم پهپاد منبع باز CQ230

Pixhawk: سیستم سخت افزاری پهپاد
از کنترلر Pixhawk 2.4.8، مجهز به پردازنده جدید استاندارد 32 بیتی STM32F427 و جفت شده با فشارسنج 5611 استفاده می کند. این یک کنترل کننده منبع باز مقرون به صرفه با گزینه های رابط غنی است.

ArduPilot: سیستم نرم افزاری Drone
سیستم نرم افزاری پهپاد - اساساً سیستم عامل کنترلی - از پروژه منبع باز ArduPilot استفاده می کند.
(ArduPilot یک سیستم نرم افزاری پیشرفته، با امکانات کامل و قابل اعتماد منبع باز خودکار ارائه می دهد.)
می تواند تمام سیستم های پهپاد قابل تصور را کنترل کند. برای کسانی که عاشق فناوری، هواپیماهای بدون سرنشین و کاوش هستند، درک ArduPilot شما را با دنیایی جذاب و جذاب آشنا می کند.

ArduPilot در بیش از 1,000,000 سیستم پهپاد در سراسر جهان نصب شده است. مجهز به ابزارهای پیشرفته ثبت اطلاعات، تجزیه و تحلیل و شبیه سازی، یک سیستم خلبان خودکار کاملاً آزمایش شده و قابل اعتماد است. همچنین توسط سازمان ها و شرکت های بزرگی مانند ناسا، اینتل، اینسیتو، بوئینگ و موسسات و دانشگاه های متعدد در سراسر جهان برای آزمایش و توسعه استفاده می شود.

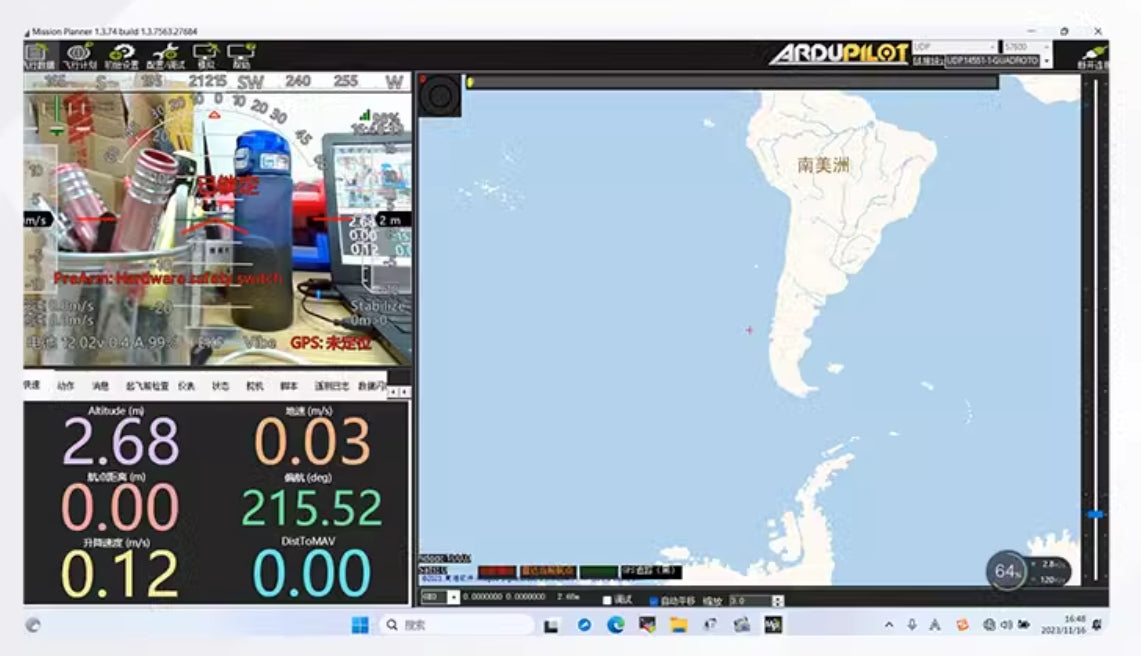
Mission Planner ایستگاه کنترل زمینی
ویژگی ها:
- ابزارهای تنظیم و تنظیم پارامترهای پهپاد؛
- مسیرهای پرواز را روی نقشه ها تنظیم کنید، به پهپادها امکان می دهد مسیرهای از پیش تعیین شده را به طور خودکار دنبال کنند.
- دستورات ماموریت را از منوهای کشویی برای کنترل پهپاد انتخاب کنید.
- دانلود و تجزیه و تحلیل سیاهههای مربوط؛
- انجام شبیه سازی با استفاده از سیستم SITL (نرم افزار در حلقه).
- ویژگی های بیشتر در انتظار کشف شما هستند و امکانات به اینجا ختم نمی شود...


| ویژگی های از پیش تعریف شده | نسخه پایه | نسخه بصری |
|---|
| ترسیم خط | ✓ | ✓ |
| نگه داشتن ارتفاع، شناور، تثبیت | ✓ | ✓ |
| بازگشت به خانه، بازگشت ایمن | ✓ | ✓ |
| فرود، فرود کم باتری | ✓ | ✓ |
| موقعیت یابی GPS در فضای باز و مسیر پرواز | ✓ | ✓ |
| کنترل قابل برنامه ریزی Dronekit-Python | ✓ | ✓ |
| تله متری WiFi برای انتقال داده ها در زمان واقعی (حدود 5 متر برد) | ✗ | ✓ |
| موقعیت یابی جریان نوری داخلی، تعیین ارتفاع لیزری | ✓ | ✓ |
| ناوبری موقعیت یابی بصری دوگانه داخلی، نقاط لنگر MP، پرواز مسیر، فرود دقیق با تشخیص کد QR | ✗ | ✓ |
مناسب برای پرواز در فضای داخلی
طراحی جمع و جور با ابعاد 360 میلی متر × 360 میلی متر × 300 میلی متر، ایده آل برای عملیات در فضای کوچک.

قاب فیبر کربن، محکم و مقاوم در برابر افتادن

طراحی حلقه ضد برخورد به طور موثری از موتور و تیغه های پروانه برای اطمینان از ایمنی پرواز محافظت می کند.

توسعه پذیری پیشرفته برای توسعه عملکردی چند سناریویی
بر اساس مدل پایه، سیستم Raspberry Pi 4B را اضافه کرده و سیستم Raspberry Pi را یکپارچه کرده است. این سیستم شامل:
- اوبونتو 20.04 (سیستم عامل متن باز با رابط گرافیکی)
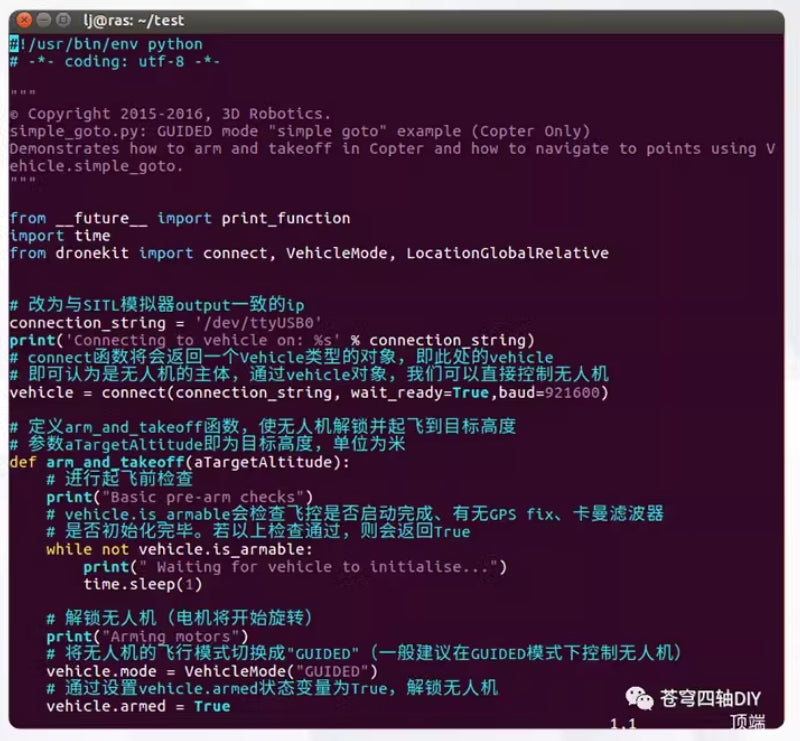
- Dronekit-Python (یک کتابخانه پایتون برای برنامه نویسی کنترل پهپاد با استفاده از Dronekit)
- پیماولینک (پیاده سازی پایتون از پروتکل MAVLink، کنترل پهپاد قابل برنامه ریزی را با استفاده از Pymavlink امکان پذیر می کند)
- ROS (سیستم عامل ربات)
- ماوروس (پروتکل ارتباطی برای کنترل پهپادها از طریق ROS)
- جی استریمر (انتقال جریان ویدئو با تاخیر کم)
- Mavlink-router (داده های MAVLink کنترلر پرواز را در نقاط پایانی مختلف توزیع می کند)
- OpenCV (کتابخانه نرم افزار منبع باز برای پردازش بینایی کامپیوتری)

بر اساس سیستم فوق، پهپاد می تواند به موارد زیر دست یابد:
- کنترل پهپاد قابل برنامه ریزی با استفاده از Dronekit-Python
2. OPEN CV Visual Processing
یک دوربین CSI اضافه شده است که امکان انتقال تصویر و پردازش پس از آن را فراهم می کند:
- استریم های بصری را می توان با استفاده از Raspberry Pi ضبط کرد و با ابزارهایی مانند OpenCV پردازش کرد.
- جریانهای ویدیوی HD بیدرنگ نیز میتوانند برای پردازش به رایانه شخصی منتقل شوند یا برای بررسی به دستگاه تلفن همراه ارسال شوند.

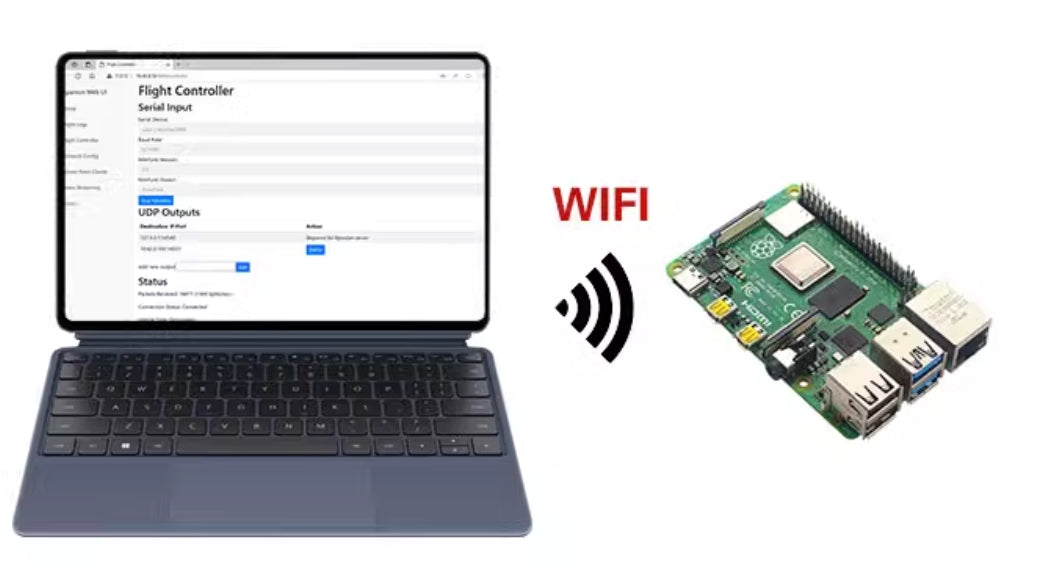
3. زمان واقعی انتقال ویدئو HD
4.پایش داده های ایستگاه زمینی
ارتباط و انتقال تصویر بین شبکه WiFi و ایستگاه زمینی رایانه شخصی (MP) بدون نیاز به ماژول های انتقال اضافی قابل دستیابی است. پس از اتصال کامپیوتر به نقطه اتصال WiFi 4B، انتقال داده و تصویر را می توان با دسترسی آغاز کرد. 10.42.0.10:3000 از طریق یک مرورگر وب
5. توسعه ویژگی های اضافی و تأیید الگوریتم بر اساس سیستم منبع باز فوق
آموزش های پشتیبانی از نسخه ویژوال:
علاوه بر آموزش های نسخه اولیه، آموزش های مقدماتی برای پردازش تصویری Raspberry Pi نیز ارائه شده است.
Related Collections









