






کنترلر پهپاد CUAV Pixhawk V6X V2 برای PX4 ArduPilot، STM32H753IIK6، RM3100، اترنت 100Mbps
کنترلر پهپاد CUAV Pixhawk V6X V2 برای PX4 ArduPilot، STM32H753IIK6، RM3100، اترنت 100Mbps
CUAV
در دسترس بودن پیکاپ بارگیری نشد
بررسی اجمالی
CUAV Pixhawk V6X V2 یک کنترلر هواپیماهای بدون سرنشین از سری Pixhawk است که برای نرمافزارهای خودکار PX4 و ArduPilot طراحی شده است. این کنترلر از استاندارد Pixhawk FMU v6x و فلسفه طراحی مدولار پیروی میکند و دارای حسگرهای صنعتی با کیفیت بالا و افزونگی، ساعت خارجی با دمای ثابت و طراحی دفع حرارت MCU، سوئیچینگ سطح PWM 5V/3.3V و ساختار جذب شوک ثبت اختراع شده است. ماژول مدیریت توان استاندارد PMU 2 Lite از ورودی 70V و تشخیص جریان 220A پشتیبانی میکند.
ویژگیهای کلیدی
- واحد نقطه شناور دو دقت H7 (STM32H753IIK6)؛ واحد نقطه شناور دو دقت 480MHz؛ حافظه فلش 2M
- ماتریس IMU سهگانه با redundancy غیر مشابه صنعتی با طراحی مستقل باس و منبع تغذیه (IIM-42652, BMI088, ICM-45686)
- بارومتر دوگانه ترکیبی با redundancy (BMP581, ICP-20100)
- سیستم جذب شوک هستهای با جذب شوک سهمحوره (X, Y, Z)؛ طراحی پشتیبانی چهارگوش مایل؛ نوع جدیدی از ماده جذب شوک
- قطبنمای مغناطیسی RM3100 با درجه خودرویی برای رد کردن تداخل مغناطیسی قوی
- جبران ساعت کریستالی خارجی IMU (استفاده شده با ساعت خارجی با دمای ثابت با دقت بالا برای کاهش خطاهای ODR و بهبود حساسیت و همزمانی)
- سیستم کنترل دمای ثابت: سیلیکون حرارتی و جبران دمای IMU برای کاهش انحراف مرتبط با دما
- نرمافزار انعطافپذیر که بین 5V و 3V سوئیچ میکند.سطح خروجی PWM 3V
- رابط اترنت 100 Mbps یکپارچه برای همگامسازی دادههای با سرعت بالا با دستگاههایی مانند کامپیوترهای مأموریت و دوربینهای نقشهبرداری
- پشتیبانی از بوت امن و خدمات بهروزرسانی امن نرمافزار
- طراحی منبع تغذیه چندگانه؛ پشتیبانی از ورودی PMU CAN دو کاناله؛ شامل PMU 2 Lite بهعنوان استاندارد
- سوراخهای نصب در پایین اضافه شده برای نصب مستقیم با پیچ؛ سوراخهای نصب با پیچهای استاندارد M2 سازگار است
مشخصات
| پردازنده | STM32H753IIK6 |
| کوپروسرس | STM32F103 |
| نسخه | Pixhawk V6XV2 |
| CPU / حافظه (بیان شده) | واحد نقطه شناور با دقت دوگانه 480MHz؛ حافظه فلش 2M |
| شتابسنج & ژیروسکوپ | IIM-42652; BMI088; ICM-45686 |
| قطبنما | RM3100 |
| بارومتر | BMP581; ICP-20100 |
| PWM ورودی/خروجی | 16 |
| سطح PWM | 3.3V / 5V (سوئیچینگ نرمافزاری) |
| قدرت | 2 (2 رابط قدرت CAN) |
| پورت GPS | 2 (GPS1: رابط GPS با I2C و سوئیچ ایمنی؛ GPS2: رابط با I2C و GPS) |
| پورت TELEM | 3 |
| باس CAN | 2 |
| PPM RC | 1 (ورودی اختصاصی برای گیرنده PPM) |
| SBUS/DSM/RSSI | 2 (1 ورودی SBUS/DSM/Spektrum؛ 1 آنالوگ 3.3V/PWM ورودی) |
| خروجیهای SBUS | 1 |
| اشکالزدایی FMU | 1 |
| اشکالزدایی IO | 1 |
| اترنت | 1 (100 Mbps) |
| SPI خارجی 1 | 1 (رابط SP16 برای گسترش حسگر خارجی) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| پورت USB | 2 (نوع-C x1; رابط GH x1 برای اتصال خارجی USB) |
| کارت TF | 1 |
| ماژول تغذیه | PMU استاندارد 2 Lite (نسخه 5V)، ولتاژ ورودی: 12-70V |
| ولتاژ عملیاتی | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; قدرت: 4.85-5.45V |
| دمای عملیاتی | -20 تا 85C |
| اندازه | 45 x 85.1 x 29.2 mm |
| وزن | کنترلر: 97.9g; هسته: 43.1g; برد حامل (شامل پیچها): 54.8g |
| یادداشت نصب (متن دیاگرام) | سوراخهای نصب سازگار با پیچهای استاندارد M2؛ ابعاد نشان داده شده: 72 mm; 22.50 میلیمتر; 24 میلیمتر |
موارد موجود
- Pixhawk V6X V2 x1
- ماژول تغذیه CAN PMU 2 Lite 5V x1
- کابل تغذیه هدر PMU 2 Lite-5V (نسخه X7+ (V6X)، طول سیم: 25 سانتیمتر x1
- برد گسترش CAN/I2C x1
- کارت حافظه TF x1
- کابل Type-C، طول سیم: 100 سانتیمتر x1
- کابل DSM RC، طول سیم: 30 سانتیمتر x1
- کابل SBUS RC، طول سیم: 30 سانتیمتر x1
- کابل PPM RC/SBUS OUT، طول سیم: 30 سانتیمتر x1
- کابل اترنت، طول سیم: 40 سانتیمتر x1
- کابل CAN، طول سیم: 30 سانتیمتر x1
- کابل TELEM، طول سیم: 30 سانتیمتر x1
- کابل UART 4، طول سیم: 30 سانتیمتر x1
- UART4 -> کابل I2C، طول سیم: 30 سانتیمتر x1
- کابل ADIO، طول سیم: 30 سانتیمتر x1
- کابل دیباگ، طول سیم: 10 سانتیمتر x1
- کابل گسترش کانکتور زن USB -> Type-C، طول سیم: 50 سانتیمتر x1
- دو طرفه 3M x2
برنامهها
- سازگار با ArduPilot و PX4
- پشتیبانی از چند روتور، بال ثابت، VTOL بال ثابت، هلیکوپترهای بدون سرنشین، وسایل نقلیه بدون سرنشین و کشتیهای بدون سرنشین (زیر دریاییها)
- همگامسازی دادههای اترنت با سرعت بالا با کامپیوترهای مأموریت و سایر دستگاههای onboard که پشتیبانی میشوند
برای بررسیهای سازگاری و سوالات تنظیمات، با [email protected] تماس بگیرید یا به https://rcdrone.top/. مراجعه کنید
ویدئو
جزئیات

کنترلر پرواز Pixhawk V6X V2 از پردازنده H7 استفاده میکند و شامل IMU سهگانه، بارومتر دوگانه و قطبنمای RM3100 با طراحی جذب شوک است.

Pixhawk V6X V2 از پردازنده STM32H753IIK6 H7 برای پشتیبانی از تنظیمات کنترل پرواز مبتنی بر PX4 و ArduPilot استفاده میکند.

Pixhawk V6X V2 از یک پایه جذب شوک سهمحوره (X، Y، Z) با چهار پشتیبانی گوشه مایل برای کمک به کاهش لرزش و نویز استفاده میکند.
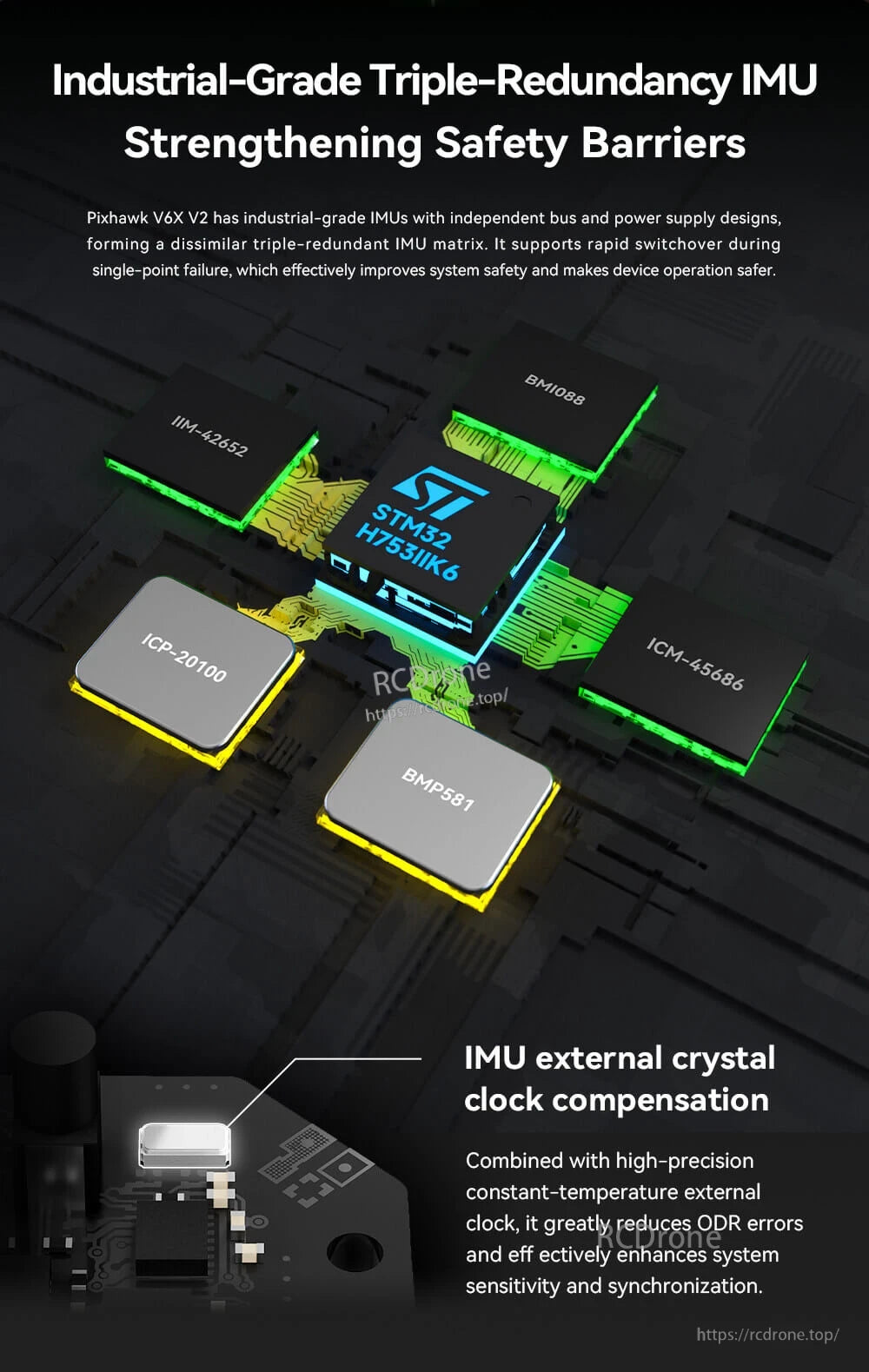
طراحی کنترلر پرواز Pixhawk V6X V2 شامل یک تنظیمات IMU سهگانه در اطراف STM32H753IIK6 است، به علاوه جبرانسازی ساعت کریستالی خارجی برای زمانبندی حسگرها.

Pixhawk V6X V2 یک مغناطیسسنج RM3100 با درجه خودرویی را ادغام کرده و از تعیین جهت GPS برای داشتن جهتگیری و ناوبری پایدارتر پشتیبانی میکند.
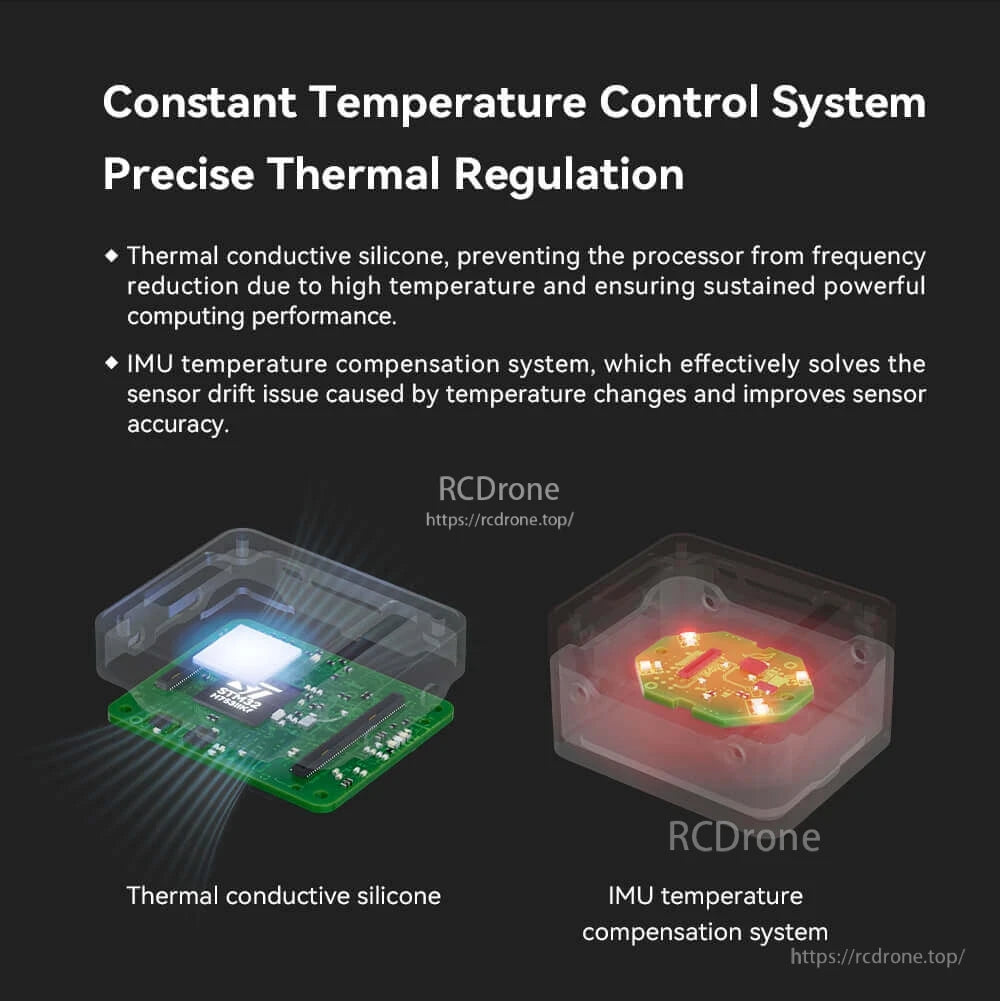
یک سیستم کنترل دما ثابت از سیلیکون حرارتی و جبران دما با IMU برای کاهش انحرافات مرتبط با دما استفاده میکند.
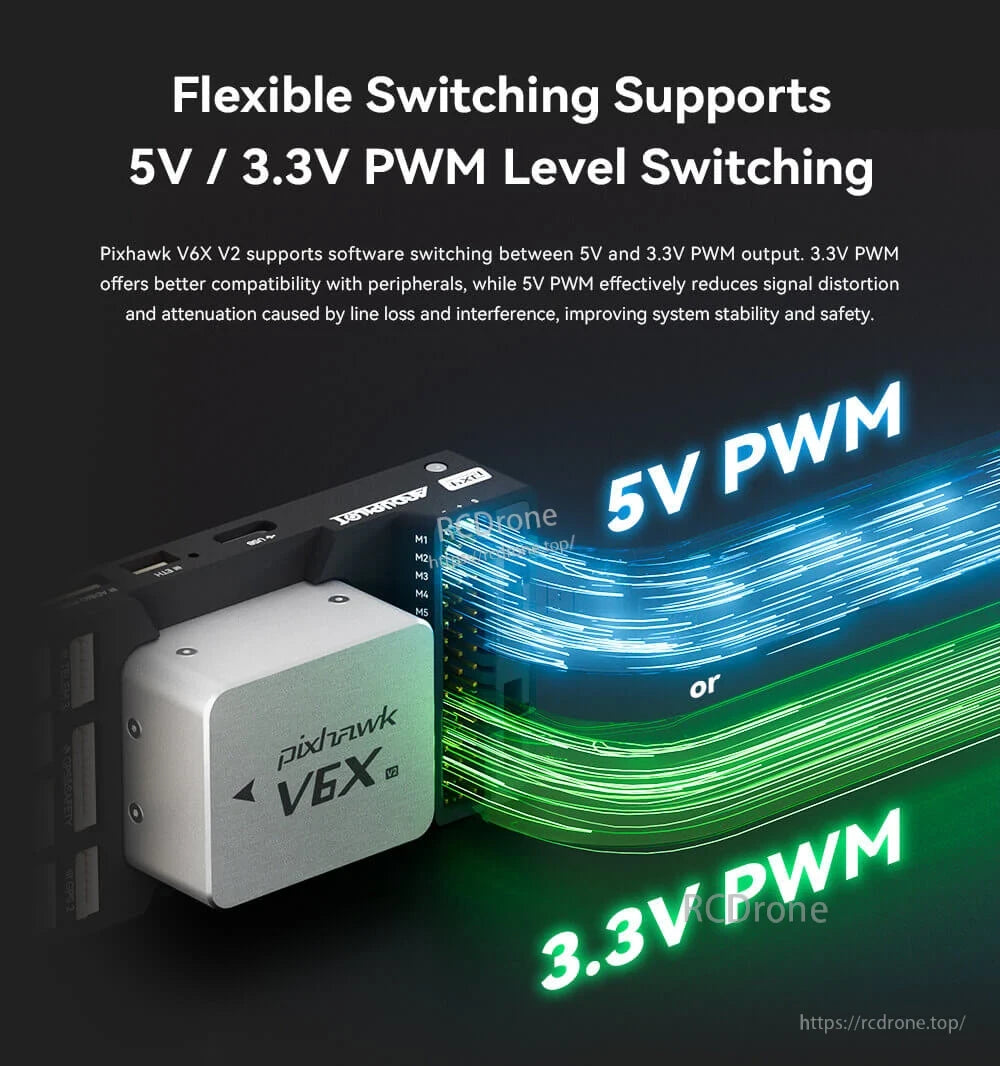
Pixhawk V6X V2 از سوئیچینگ انعطافپذیر بین سطوح خروجی PWM 5V و 3.3V پشتیبانی میکند تا سازگاری آسانتری با دستگاههای جانبی مختلف فراهم کند.

Pixhawk V6X V2 یک رابط اترنت 100 Mbps را به همراه پورتهای برچسبگذاری شده مانند USB، TELEM3، CAN و GPS & برای سیمکشی تمیز ادغام میکند.
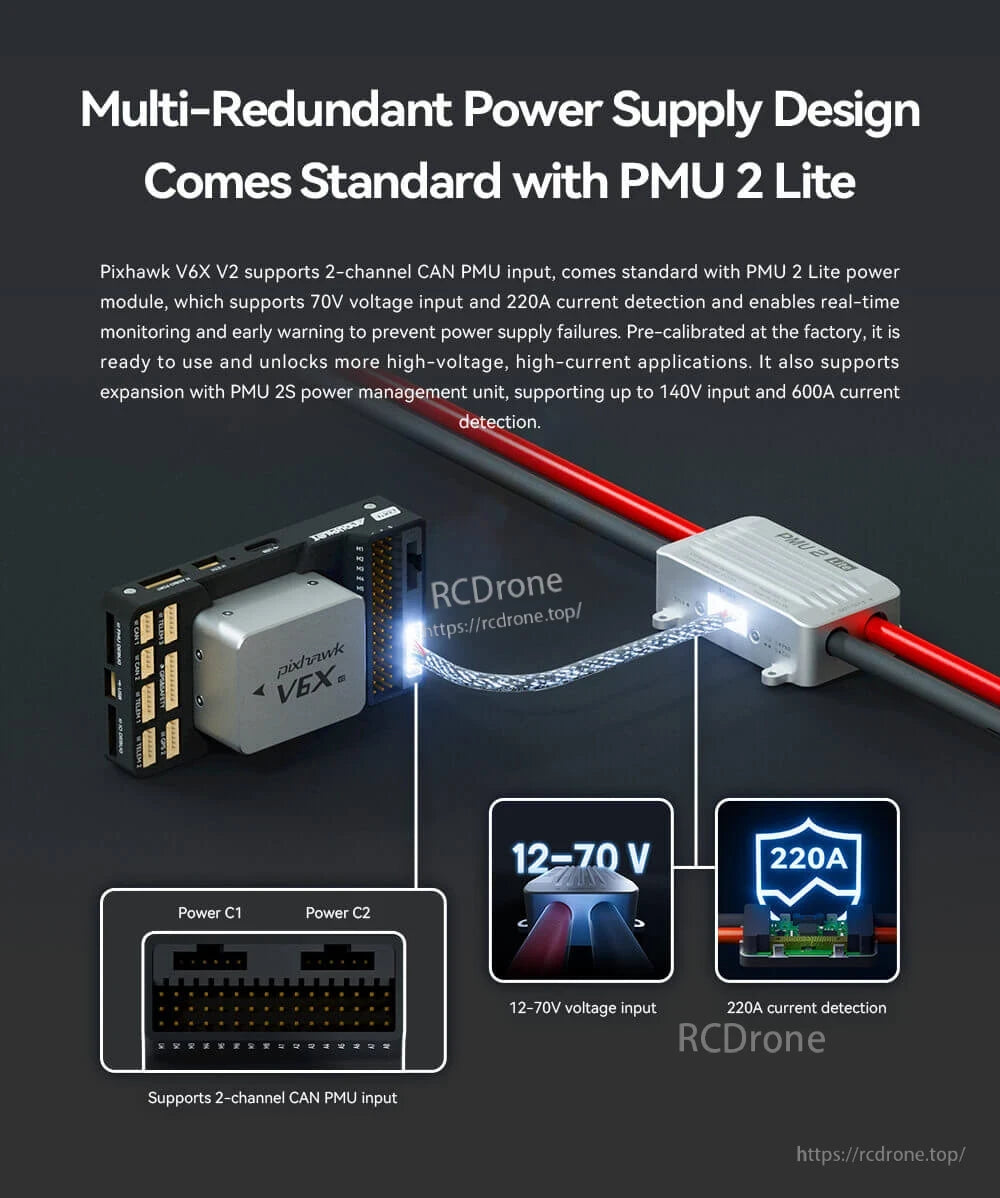
Pixhawk V6X V2 با ماژول PMU 2 Lite برای ورودی برق چندگانه و اضافی جفت میشود و از تشخیص جریان 12–70V و 220A پشتیبانی میکند.

CUAV Pixhawk V6X V2 از یک ماژول هستهای ماژولار و قابل جدا شدن بر روی یک برد حامل استفاده میکند تا سفارشیسازی و دسترسی به اتصالات را سادهتر کند.
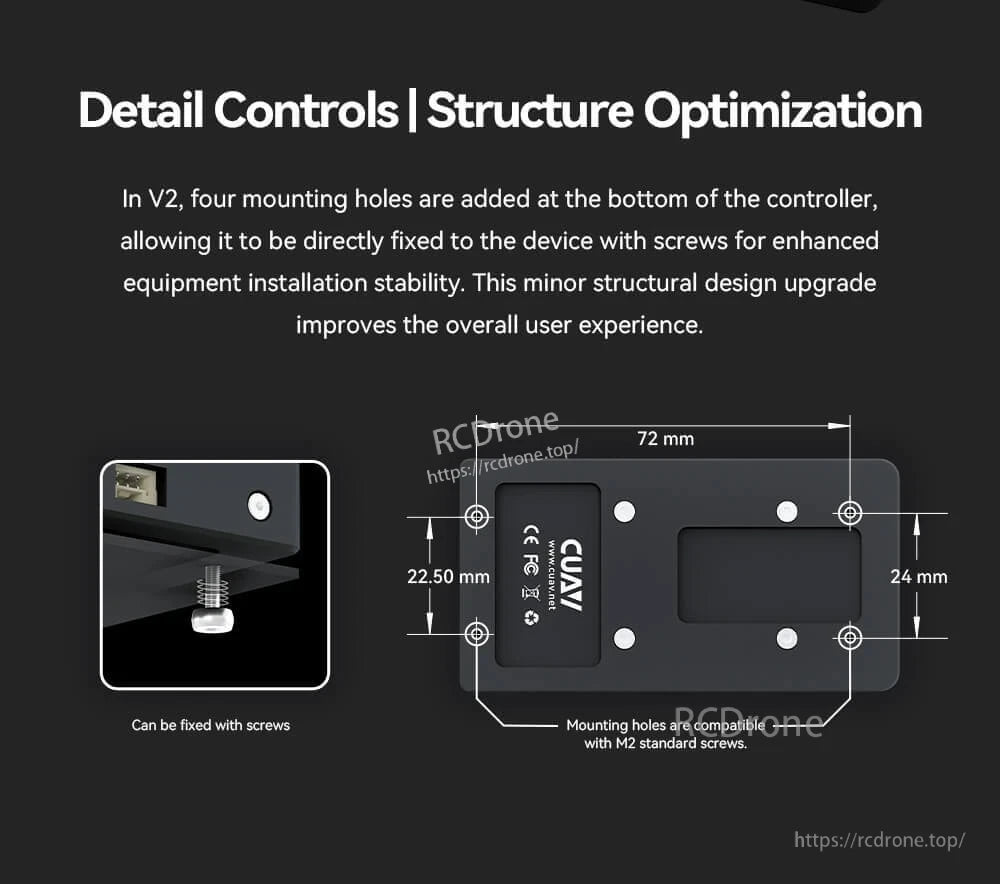
CUAV Pixhawk V6X V2 چهار سوراخ نصب از نوع M2 با ابعاد 72 میلیمتر برای نصب ایمنتر با پیچ اضافه میکند.

پیکساوک V6X V2 از نرمافزارهای ArduPilot و PX4 برای مجموعهای از پلتفرمهای بدون سرنشین شامل مولتیروتور، هواپیماهای بال ثابت و وسایل نقلیه زمینی یا دریایی پشتیبانی میکند.
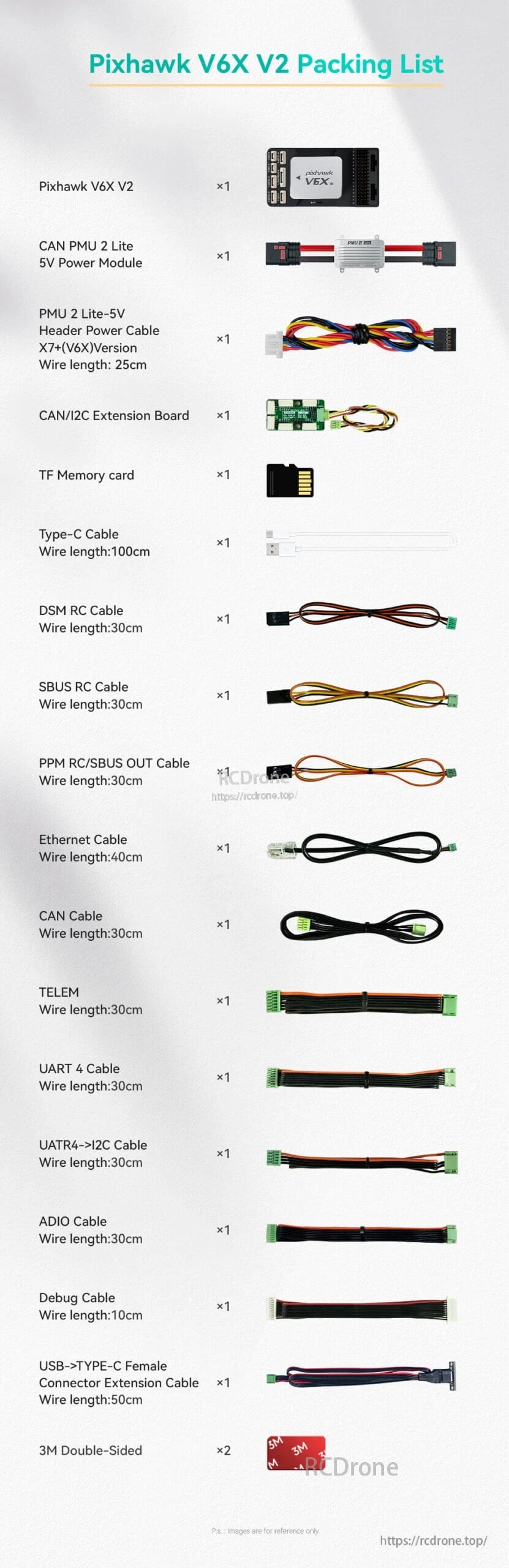
کیت پیکساوک V6X V2 شامل کنترلر پرواز، ماژول تغذیه CAN PMU 2 Lite 5V، کارت حافظه TF و مجموعهای از کابلهای Type‑C، RC، Ethernet، CAN، TELEM، UART، ADIO و کابلهای اشکالزدایی است.
Related Collections


















