


کنترلر پرواز BETAFPV F4 2-3S 20A AIO V1، سریال ELRS 2.4G، BEC 9V/5V، DJI O3 با PMU شش پین
کنترلر پرواز BETAFPV F4 2-3S 20A AIO V1، سریال ELRS 2.4G، BEC 9V/5V، DJI O3 با PMU شش پین
BETAFPV
در دسترس بودن پیکاپ بارگیری نشد
Overview
کنترلر پرواز AIO BETAFPV F4 2-3S 20A V1 برای ساختهای HD دیجیتال VTX طراحی شده است که از باتریهای 2-3S استفاده میکند. این کنترلر یک ESC 20A را با یک راهحل دوگانه BEC (9V@2A for DJI O3 و 5V@3A for دستگاههای خارجی) ترکیب میکند تا در هنگام تغییرات گاز، قدرت پایدار را حفظ کند. همچنین دارای یک کانکتور PMU 6 پین DJI O3 برای نصب بدون لحیمکاری و یک پورت USB 4 پین SH1.0 در عقب برای تنظیم و نگهداری است.
ویژگیهای کلیدی
- ولتاژ ورودی: 2-3S
- خروجیهای دوگانه BEC: 9V@2A (DJI O3) و 5V@3A (دستگاههای خارجی)
- DJI O3 6-pin PMU برای نصب آسانتر HD VTX (بدون لحیمکاری برای کانکتور)
- ESC داخلی: 20A مداوم، 25A اوج؛ پشتیبانی سیگنال D-shot300 / D-shot600
- MCU: STM32F405RGT6 @ 168MHz
- گیرنده onboard: Serial ELRS 2.۴G (پروتکل CRSF)
- IMU (SPI): ICM42688P / ICM42605 (یادداشتهای گرافیکی نشان میدهند “@8K”)
- جعبه سیاه ۱۶MB؛ بارومتر؛ ولتاژ & حسگر جریان
- پورت USB به عقب منتقل شده است (SH1.0 ۴ پین)
- UART3 میتواند آزاد شود (TX3/RX3) و توان RX روی برد میتواند از طریق تغییرات سختافزاری که در زیر توضیح داده شده است قطع شود
مشخصات
| وزن | ۵.۵۸ گرم (بدون کانکتورهای موتور و کابل برق)؛ ۵.۹۲ گرم (با کانکتورهای موتور) |
| اندازه سوراخ نصب | ۲۶mm x ۲۶mm |
| CPU | STM32F405RGT6 (۱۶۸MHz) |
| IMU ششمحوره (SPI) | ICM42688P / ICM42605 |
| گیرنده (RX) | گیرنده سری ELRS ۲.۴G |
| نسخه فریمور RX | BETAFPV AIO ۲۴۰۰ RX ELRS V3.3.0 |
| آنتن | سیم لعابی |
| حافظه بلک باکس | 16MB |
| حسگرها | بارومتر (BMP280 / DSP310); ولتاژ & جریان |
| 5V BEC | 5V 3A@8V supply * |
| 9V BEC | 9V 2A@8V supply * |
| پورت USB | SH1.0 4-pin |
| جریان ESC داخلی | 20A مداوم; اوج 25A |
| ولتاژ ورودی ESC | 2-3S |
| نسخه فریمور FC | Betaflight_4.4.1_BETAFPVF405 |
| فریمور ESC | C_X_70_48_V0.19.2.hex (سختافزار BB51 Bluejay) |
| پشتیبانی سیگنال ESC | D-shot300, D-shot600 |
* جریان خروجی BEC با افزایش دما کاهش مییابد.
نکات سیمکشی / پیناوت (از دیاگرامهای برد)
- پدهای باتری: Batt+ (2-3S)، Batt-
- پورت VTX دیجیتال HD (کانکتور)؛ یادداشت VCC نشان داده شده: 9V (پیشفرض) / 5V
- پدهای I2C: SCL، SDA
- پدهای UART نشان داده شده: T1/R1، T6/R6، TX3/RX3، TX4/RX4؛ پد SBUS نیز نشان داده شده
- پدهای بوزر: BUZZ+ و BUZZ-؛ پدهای LED نشان داده شده
- علامتگذاری بارومتر: BMP280/DSP310
- علامتگذاریهای مربوط به گیرنده نشان داده شده: SX1280/SX1281، ESP8285، آنتن WiFi، LED RX (سبز)، LED FC (آبی)
- علامتگذاریهای دیاگرام پایین: دکمه BOOT FC/گیرنده، LED RGB 1 / LED RGB 2، 5V BEC، سنسور جریان onboard
- پدهای USB نشان داده شده در دیاگرام پایین: D-، D+، GND، USB 5V
- علامتگذاری MCU ESC نشان داده شده در دیاگرام پایین: EFM8BB51 (FW C_X_70)؛ “20A MOS” در اطراف مناطق ESC نشان داده شده؛ برچسبهای ESC1/ESC2/ESC3/ESC4
یادداشتهای راهاندازی (متن نشان داده شده در گرافیک سیمکشی)
- برای VTX دیجیتال HD، UART4 نیاز به فعالسازی Configuration/MSP دارد.
- اگر از یک گیرنده خارجی استفاده میشود، UART1/6 را به عنوان RX سریال تنظیم کنید.
- GPS: ورودی سنسور را به عنوان "GPS" در UART1/6 تنظیم کنید، سپس GPS را در تب GPS فعال کرده و پروتکل صحیح برای ماژول GPS را انتخاب کنید.
- پروتکل SBUS RX: حالت گیرنده را به "گیرنده مبتنی بر سریال" تنظیم کنید و تأمینکننده گیرنده سریال را به "SBUS" تنظیم کنید.
- پروتکل CRSF RX: حالت گیرنده را به "گیرنده مبتنی بر سریال" تنظیم کنید و تأمینکننده گیرنده سریال را به "CRSF" تنظیم کنید.
- نمونههای VTX دیجیتال HD نشان داده شده: Caddx Vista / Runcam Link VTX، Walksnail VTX، HDZero VTX.
- نمونههای RX پروتکل SBUS نشان داده شده: Frsky XM+ / Futaba AC900 / Flysky RX2A Pro.
- نمونههای RX پروتکل CRSF نشان داده شده: TBS Nano / ELRS Series RX.
- یادداشت نشان داده شده: برخی از واحدهای VTX دیجیتال HD ممکن است شامل یک گیرنده SBUS یکپارچه باشند (با رادیو DJI کار میکند). هنگام استفاده از یک گیرنده خارجی، ممکن است سیمکشی SBUS به VTX دیجیتال لازم نباشد.
سوالات متداول / گزینههای سختافزاری
- قطع برق: برداشتن مهره چیپ منبع تغذیه را قطع میکند؛ برای استفاده مجدد از گیرنده ELRS روی بورد، پدهای لحیم را به هم لحیم کنید تا برق را بازگردانید.
- آزادسازی UART3: برداشتن دو مقاومت روی پدهای لحیم UART3 را آزاد میکند (چپ: TX3، راست: RX3). برای اتصال مجدد، هنگام استفاده مجدد از گیرنده ELRS روی بورد، پدهای لحیم را به هم لحیم کنید.
- کلید ولتاژ (کانکتور HD VTX): ولتاژ پیشفرض برای کانکتور HD VTX برابر با 9V است. برای استفاده از WalkSnail Avatar HD mini 1s و Lite، اطمینان حاصل کنید که منبع تغذیه 5V است با جابجایی مهره چیپ از موقعیت 9V به موقعیت 5V (یا به جای مهره چیپ از لحیم برای جابجایی بین پدهای 5V و 9V استفاده کنید).
- توجه به انتخاب موتور: از موتورهای بالای 20,000KV خودداری کنید.
فریمور / دانلودها
برای سوالات مربوط به ساخت، سیمکشی یا فریمور، با https://rcdrone.top/ یا [email protected] . تماس بگیرید.
- فریمور FC (نسخه STM32F405): Betaflight_4.4.1_BETAFVF405
- فریمور &دانلود CLI dump: https://support.betafpv.com/hc/en-us/articles/21884915967513-CLI-for-F4-2-3S-20A-Flight-Controller-ELRS-V1-0-
- انتشار Betaflight 4.4.1: https://github.com/betaflight/betaflight/releases/tag/4.4.1
یادداشتهای فریمور ESC
- راهحل BB51 ESC مبتنی بر BLHeliSuite16714903 با فریمور ESC Bluejay.
- از D-shot دوطرفه و فیلتر کردن RPM در Betaflight پشتیبانی میکند.
- گزینههای فرکانس PWM: 24kHz، 48kHz، 96kHz؛ تنظیم کارخانه پیشفرض: 48kHz.
- 96kHz در یادداشتهای ارائه شده به دلیل مشکلات ممکن در تنظیمات بیحرکتی موتور توصیه نمیشود.
- هشدار ارائه شده: فریمور را با فاصله کوتاهتر فلش نکنید، زیرا ممکن است باعث توقف و آسیب به کنترلکننده پرواز شود.
- پیکربندی ESC: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- انتشارهای فریمور Bluejay: https://github.com/bird-sanctuary/bluejay/releases (توجه: انتخاب کنید C_X_70.HEX)
گیرنده ELRS 2.4G سریال (یادداشتهای بهروزرسانی &)
- از پروتکل CRSF بین گیرنده و کنترلر پرواز استفاده میکند.
- وضعیت اتصال را با روشن و خاموش کردن سه بار وارد کنید (کنترلر پرواز را سه بار وصل و جدا کنید).
- نشانگر حالت اتصال: LED RX دو بار سریع چشمک میزند؛ متصل: نور ثابت.
- روشهای بهروزرسانی گیرنده ذکر شده: Wi-Fi یا عبور سریال Betaflight.
- یادداشتهای بهروزرسانی عبور نشان داده شده: FC را به کامپیوتر وصل کنید، به Betaflight Configurator متصل نشوید؛ هدف را “BETAFPV 2.4GHz AIO RX” انتخاب کنید؛ با استفاده از Betaflight Passthrough در پیکربندی ExpressLRS فلش کنید.
- راهنمای فلش کردن فریمور: https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
شامل موارد زیر است
- 1 x F4 2-3S 20A AIO FC V1
- 4 x پیچ ماشینی M2*10
- 4 x پیچ نایلونی M2*10
- 4 x مهره M2
- 4 x توپ جذب شوک
- 4 x سوکت زاویهای JST1.25mm
- 4 x سوکت مستقیم JST1.25mm
- 1 x کابل آداپتور 4 پین SH1.0
- 1 x آداپتور Type-C به SH1.0
- 1 x کابل برق XT30
- 1 x خازن فیلتر
- 1 x سیم کانکتور VTX دو سر 30mm
- 1 x سیم کانکتور VTX یک سر 60mm
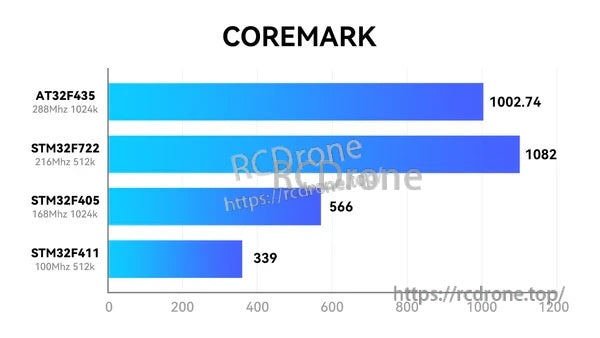
مرجع (نمودار CoreMark در گرافیک محصول نشان داده شده است)
| AT32F435 (288MHz 1024k) | 1002.74 |
| STM32F722 (216MHz 512k) | 1082 |
| STM32F405 (168MHz 1024k) | 566 |
| STM32F411 (100MHz 512k) | 339 |
جزئیات

یک راهحل جمع و جور 2–3S AIO که یک کنترلر پرواز F4 را با یک ESC 20A برای ساختهای HD به سبک whoop ترکیب میکند.

نقشه پد بالایی شفاف کمک میکند تا کانکتور دیجیتال VTX DJI، پدهای باتری، UARTها و اتصالات بوق/LED را قبل از لحیمکاری شناسایی کنید.
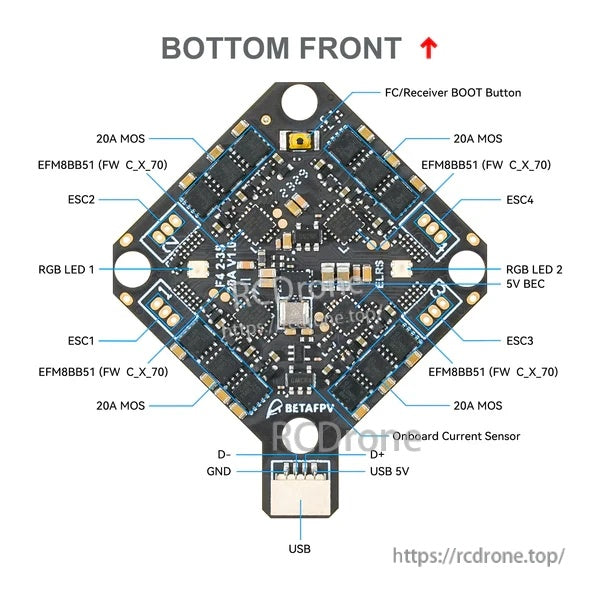
چیدمان زیرین بخشهای ESC، دکمه بوت، پدهای LED RGB، سنسور جریان روی برد و نقاط سیمکشی USB را برجسته میکند.
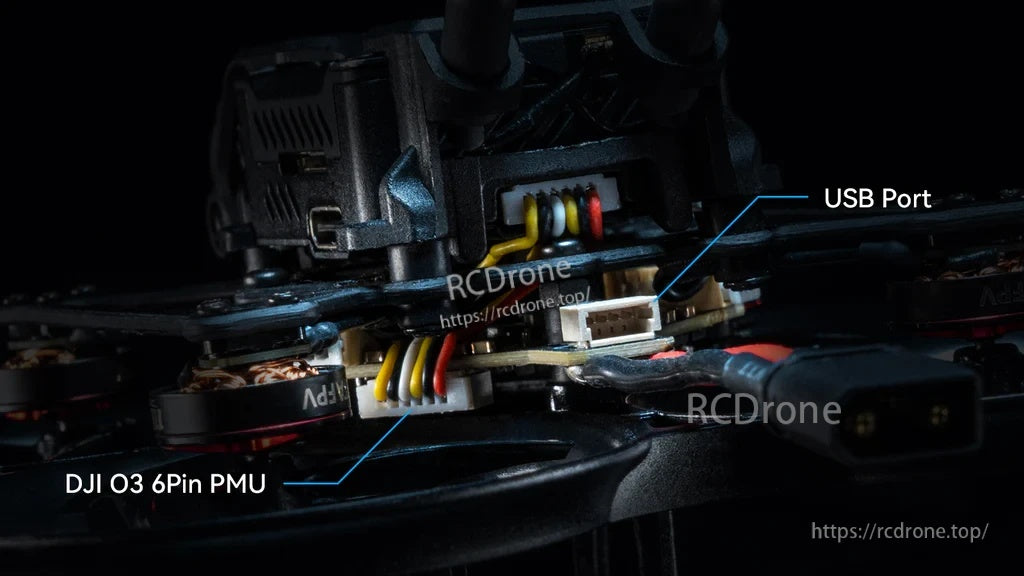
یک پورت USB نصب شده در عقب و کانکتور PMU DJI O3 سیمکشی را در فریمهای جمع و جور مرتب نگه میدارد.


کانکتور HD VTX به طور پیشفرض بر روی 9V تنظیم شده است، با گزینه 5V جایگزین که از طریق یک تغییر کوچک در لحیمکاری در دسترس است.

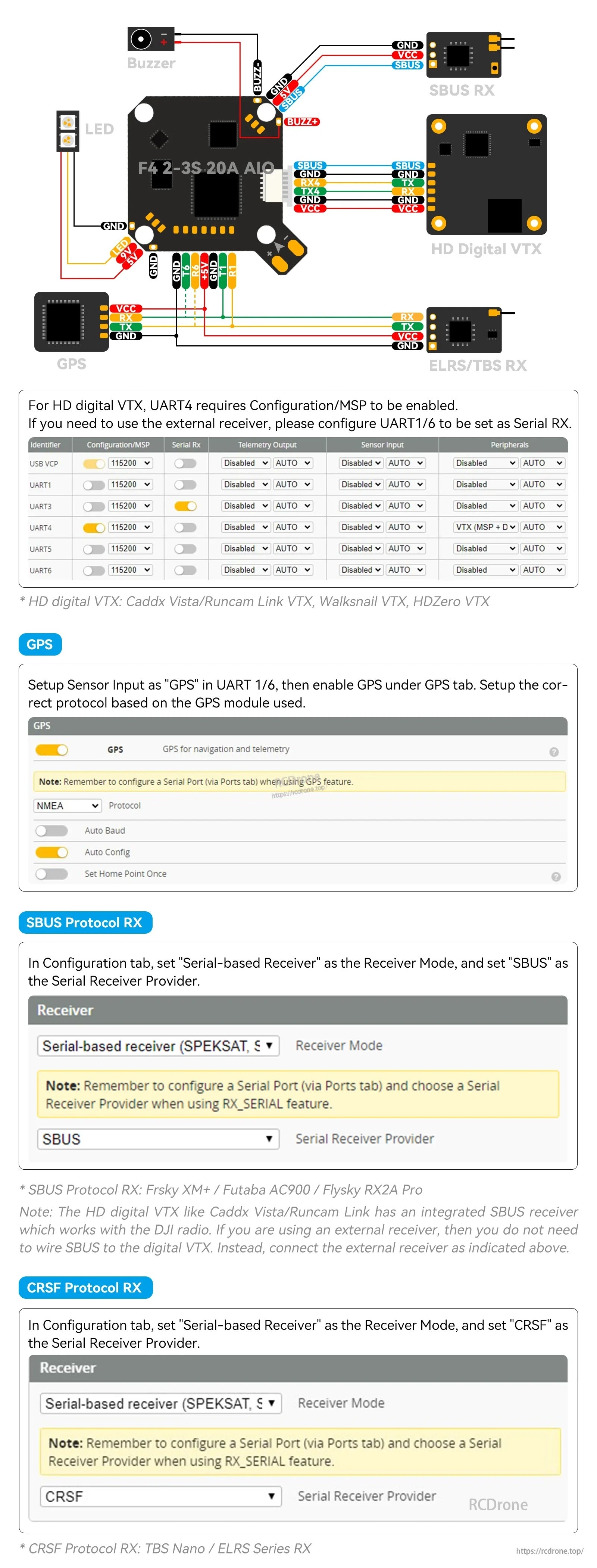
یک مثال سیمکشی و راهنمای تنظیمات گیرنده Betaflight، راهاندازی برای ساختهای VTX دیجیتال و پیکربندی گیرنده سریال را ساده میکند.

Related Collections


