کنترلر پرواز خودکار Holybro Pixhawk 4
کنترلر پرواز خودکار Holybro Pixhawk 4
HolyBro
در دسترس بودن پیکاپ بارگیری نشد
Pixhawk® 4 دارای فناوری پردازنده پیشرفته STMicroelectronics®، فناوری حسگر از Bosch®، InvenSense®، و سیستم عامل بلادرنگ NuttX است که عملکرد، انعطاف پذیری و اطمینان باورنکردنی را برای کنترل هر وسیله نقلیه خودران ارائه می دهد. .
میکروکنترلر Pixhawk 4 دارای 2 مگابایت حافظه فلش و 512 کیلوبایت رم است. با افزایش قدرت و منابع RAM، توسعه دهندگان می توانند با کار توسعه خود بهره وری و کارآمدتری داشته باشند. الگوریتم ها و مدل های پیچیده تری را می توان در خلبان خودکار پیاده سازی کرد.
IMUهای با کارایی بالا و کم نویز روی هواپیما برای کاربردهای تثبیت کننده طراحی شده اند. سیگنالهای آماده داده از همه حسگرها برای جدا کردن پینهای ضبط وقفه و تایمر در خلبان خودکار هدایت میشوند و امکان ثبت زمان دقیق دادههای حسگر را فراهم میکنند. عایقهای ارتعاشی جدید طراحیشده خوانشهای دقیقتری را امکانپذیر میکنند و به وسایل نقلیه اجازه میدهند تا عملکرد کلی پرواز بهتری داشته باشند.
دو گذرگاه SPI خارجی و شش خط انتخاب تراشه مرتبط، امکان اضافه کردن حسگرهای اضافی و بار با رابط SPI را فراهم میکنند. در مجموع چهار اتوبوس I2C وجود دارد که دو اتوبوس برای استفاده خارجی و دو اتوبوس با پورت های سریال برای ماژول های GPS/Compass گروه بندی شده اند.
توجه:
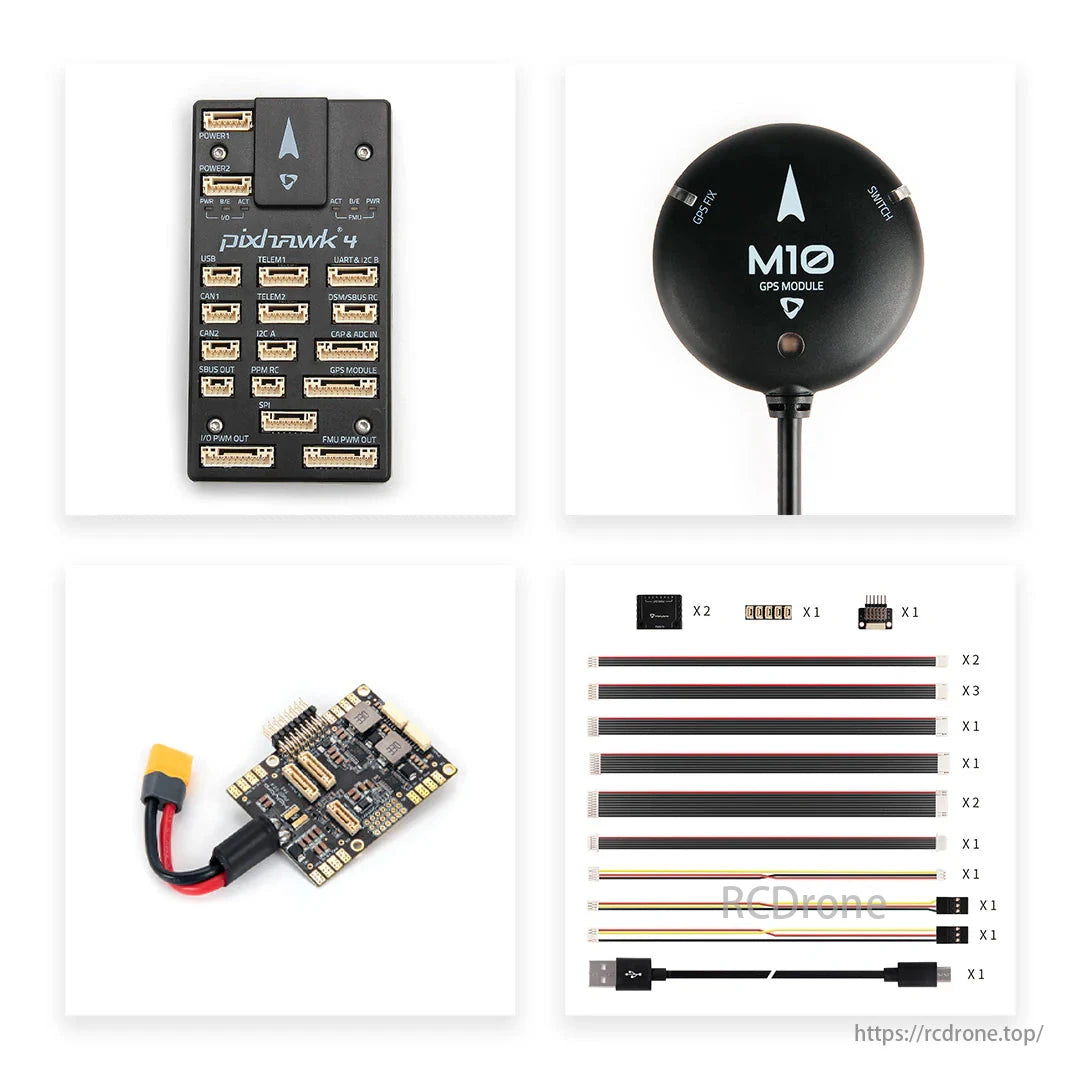
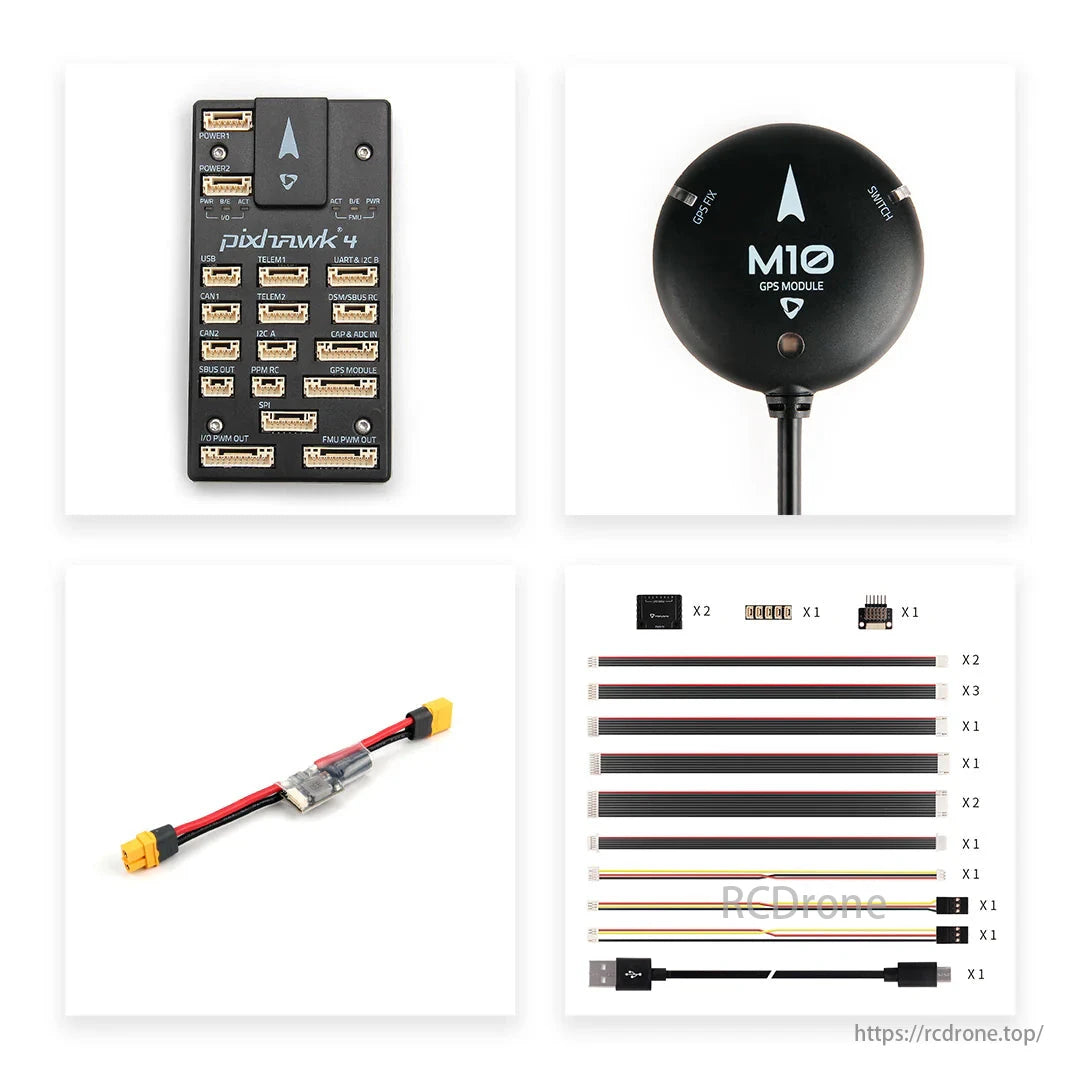
- M10 GPS نیاز دارد PX4 1.14 و ArduPilot 4.3 یا جدیدتر.
- نمودار مقایسه ماژول پاور
مشخصات فنی
- پردازنده اصلی FMU
- STM32F765 - 32 Bit Arm ® Cortex® -M7، 216MHz، حافظه 2MB، RAM 512KB
- STM32F765 - 32 Bit Arm ® Cortex® -M7، 216MHz، حافظه 2MB، RAM 512KB
- پردازنده IO
- STM32F103 - 32 بیت Arm® Cortex®-M3، 72 مگاهرتز، 64 کیلوبایت SRAM (جاری)
- STM32F100 - بازوی 32 بیتی ® Cortex® -M3، 24 مگاهرتز، 8 کیلوبایت SRAM (قطع شده)
- سنسورهای روی برد
- Accel/Gyro: ICM-20689
- Accel/Gyro: BMI055/ICM-20602
- Mag: IST8310
- فشارسنج: MS5611
- Accel/Gyro: ICM-20689
داده های الکتریکی
- خروجی ماژول برق: 4.9 ~ 5.5 ولت
- حداکثر ولتاژ ورودی: 6 ولت
- حداکثر سنجش جریان: 120A
- ورودی برق USB: 4.75 ~ 5.25 ولت
- ورودی سروو ریل: 0~36 ولت
- دمای کارکرد: -25-85 درجه سانتیگراد
داده های مکانیکی
- ابعاد: 44x84x12mm
- وزن (مورد پلاستیکی): 33.3 گرم
- وزن (کیف آلومینیومی): 49 گرم
دانلودها:
SKU 11032/11035 شامل:
- کنترلر پرواز Pixhawk 4 (پلاستیک یا آلومینیوم)
- مجموعه کابل
SKU 20045/20046/20114/20115 شامل:
- کنترلر پرواز Pixhawk 4(پلاستیک یا آلومینیوم)
- ماژول برق: PM02 V3 12S/PM07 14S
- مجموعه کابل
SKU 20139/20140/20141/20142/20269/20270/20271/20272 شامل:
- کنترلر پرواز Pixhawk 4
- ماژول برق: PM02 V3 12S/PM07 14S
- GPS: M9N/M10
- مجموعه کابل

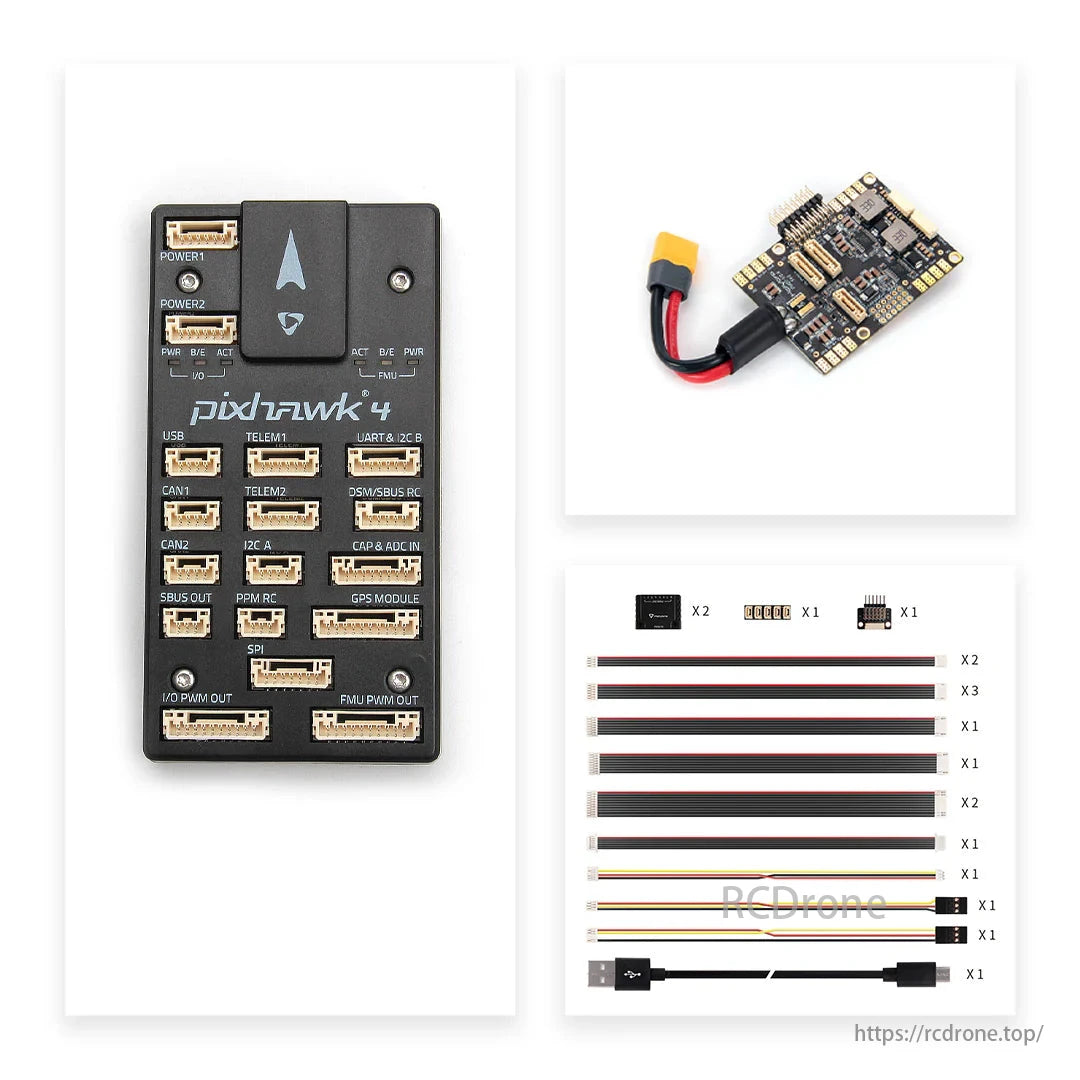
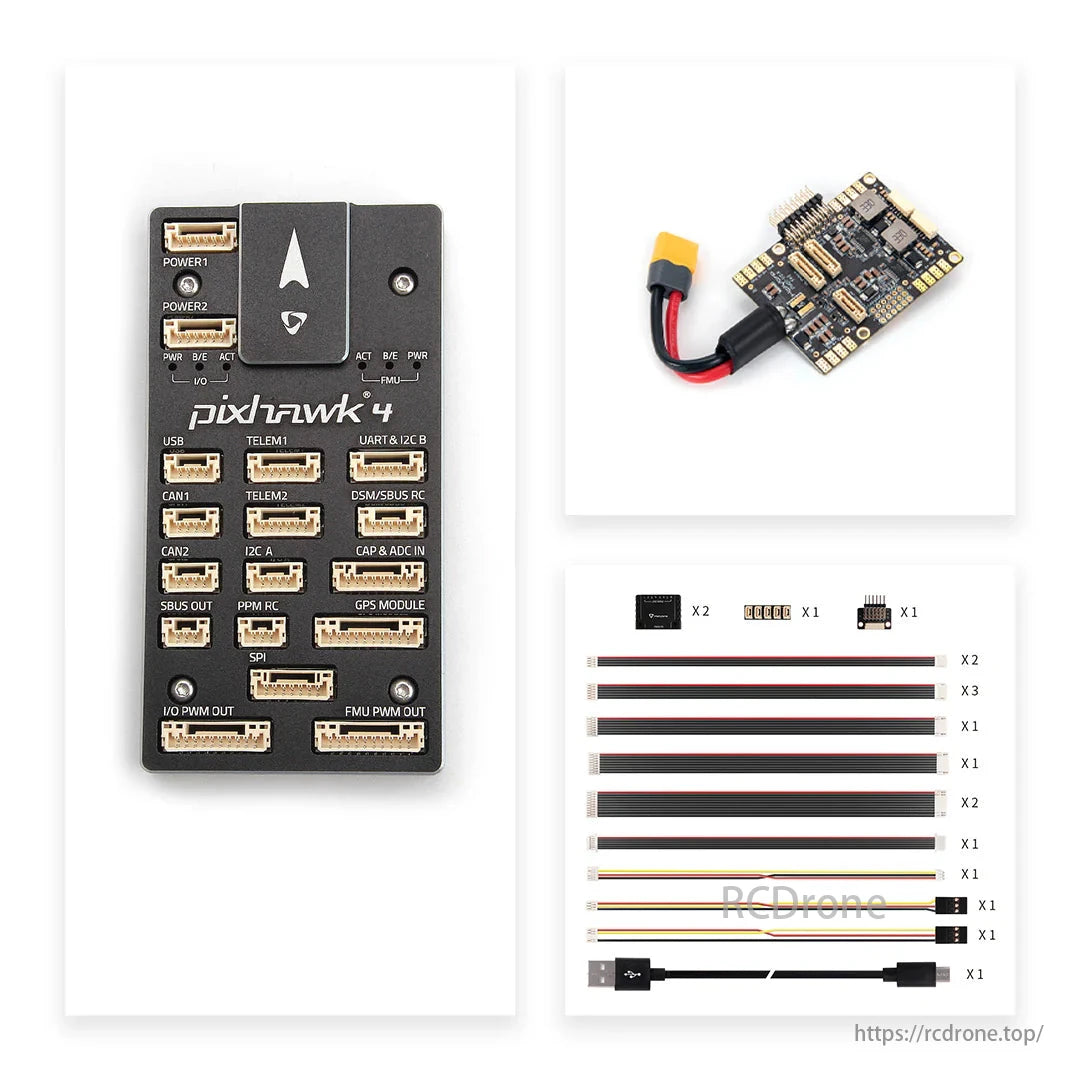
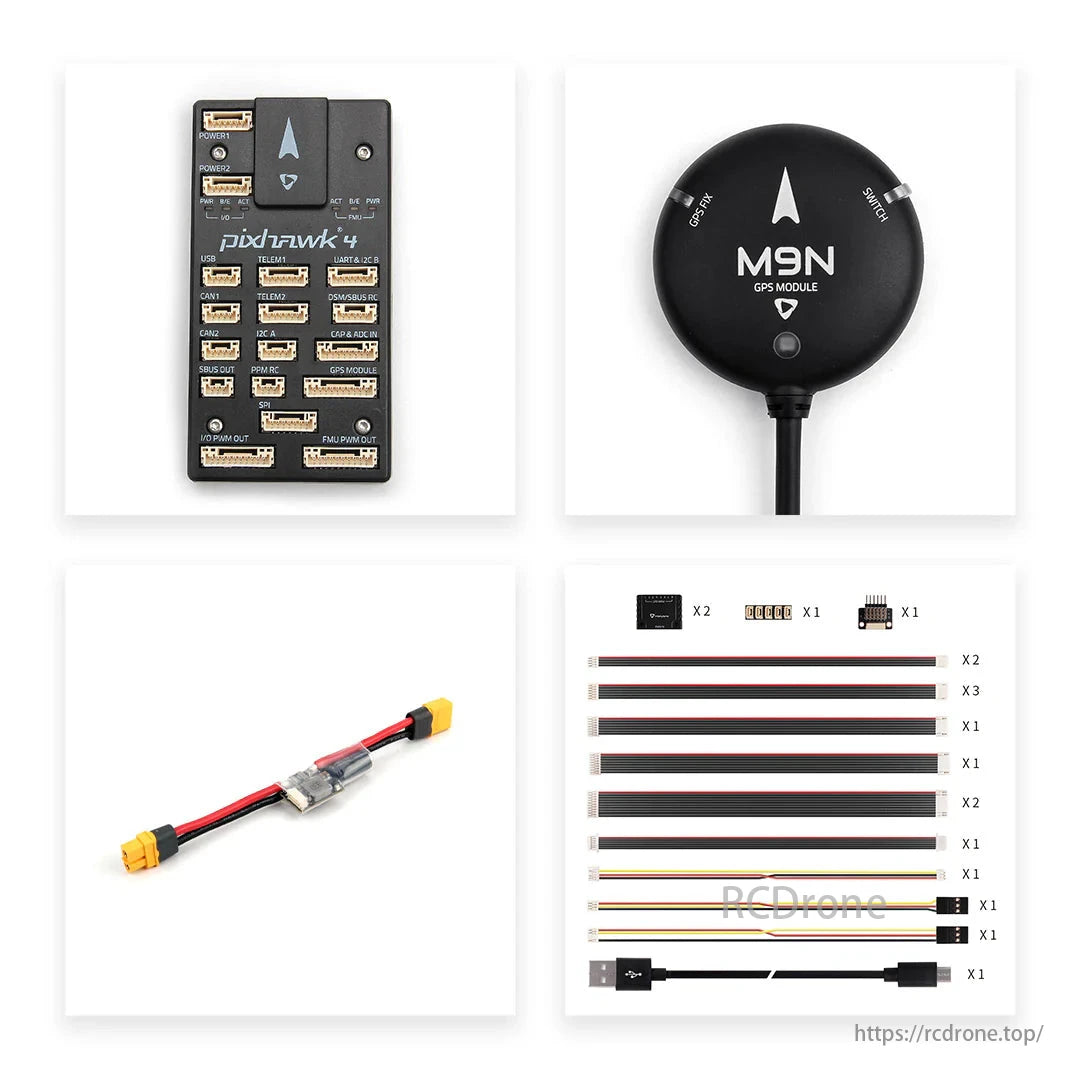
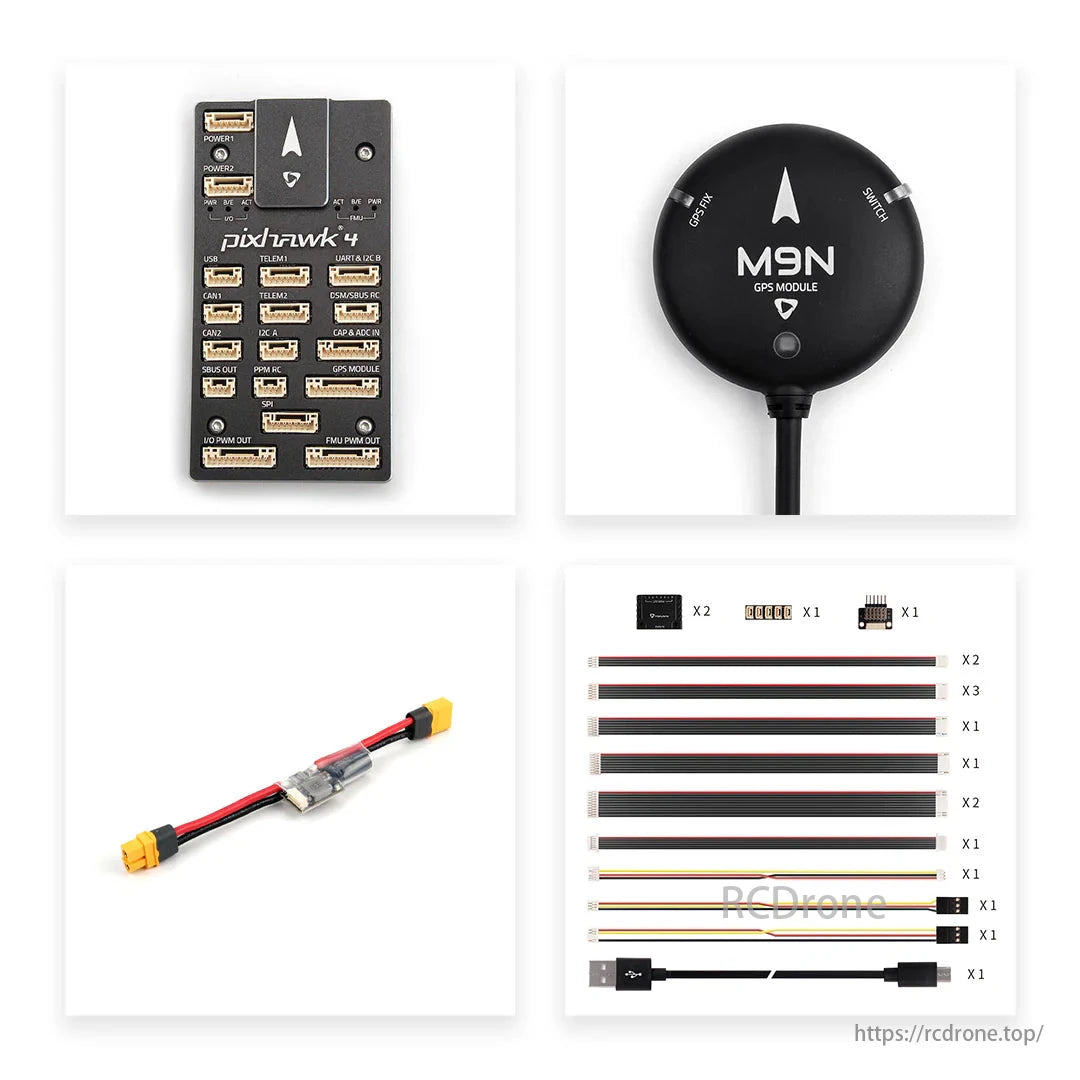
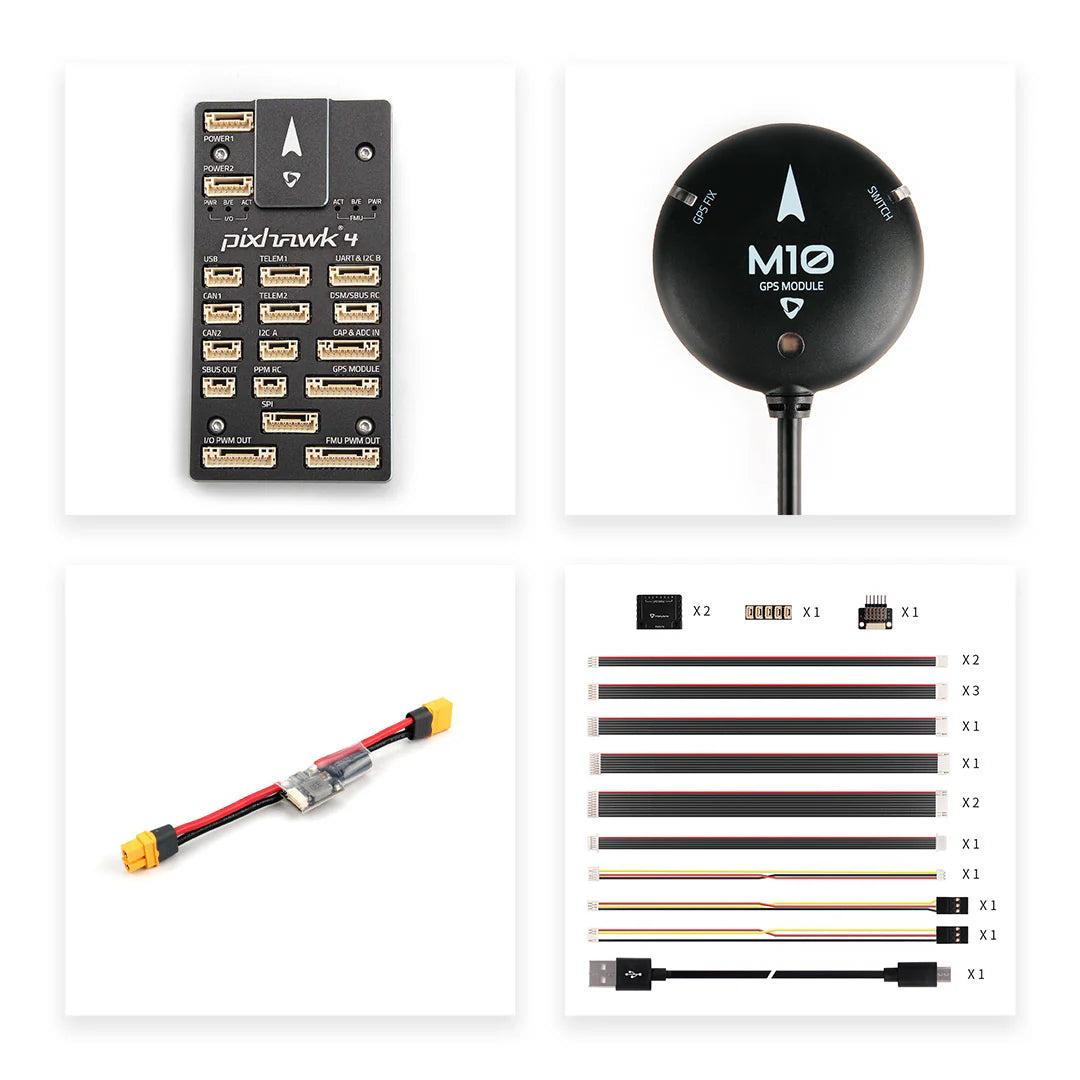
فلایت کنترل Pixhawk 4 با پورت های مختلف از جمله USB، CAN، TELEM، UART، I2C، SBUS OUT، PPM RC، SPI و GPS MODULE.

کنترلر پرواز Pixhawk، مجهز به سیستم خلبان خودکار PX4.

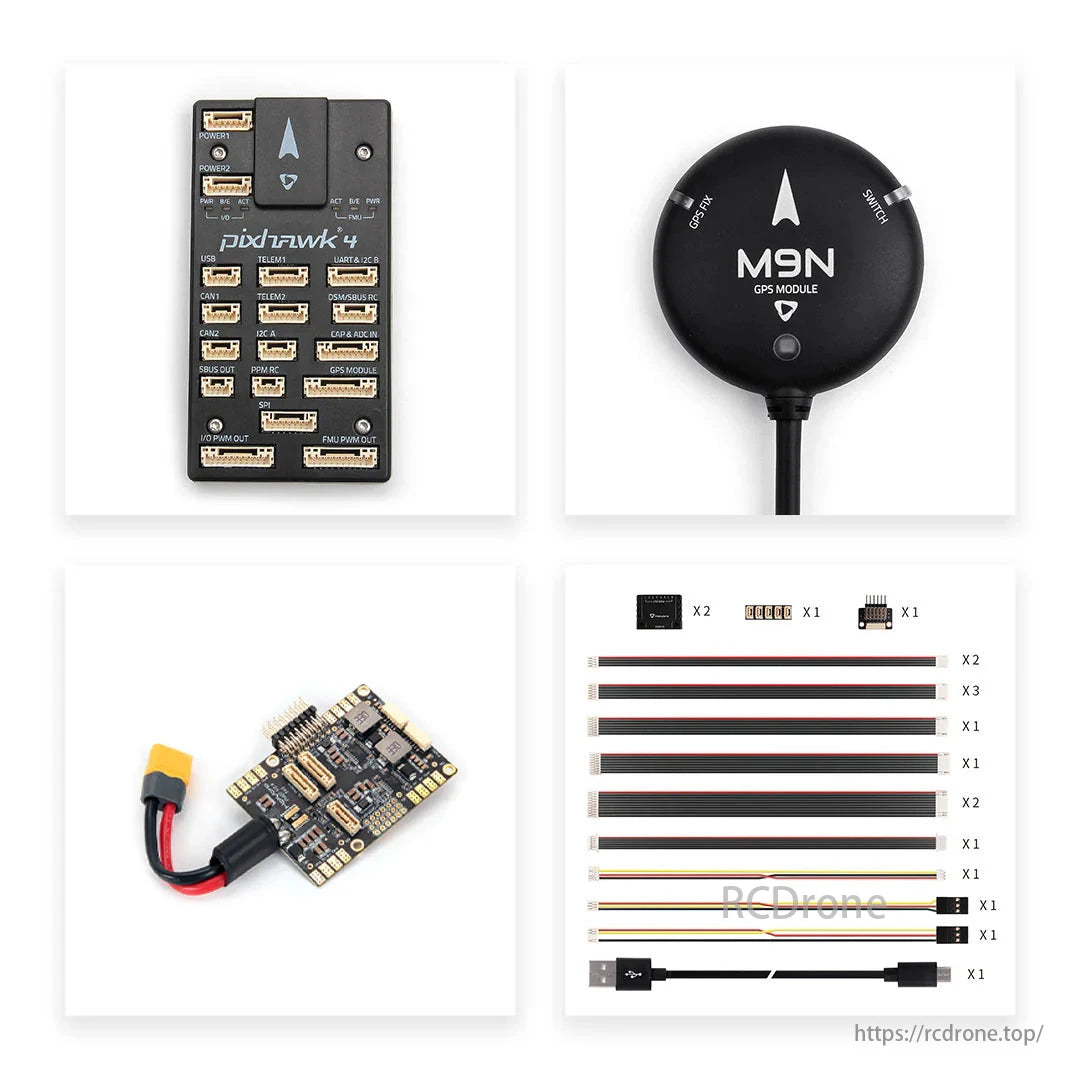
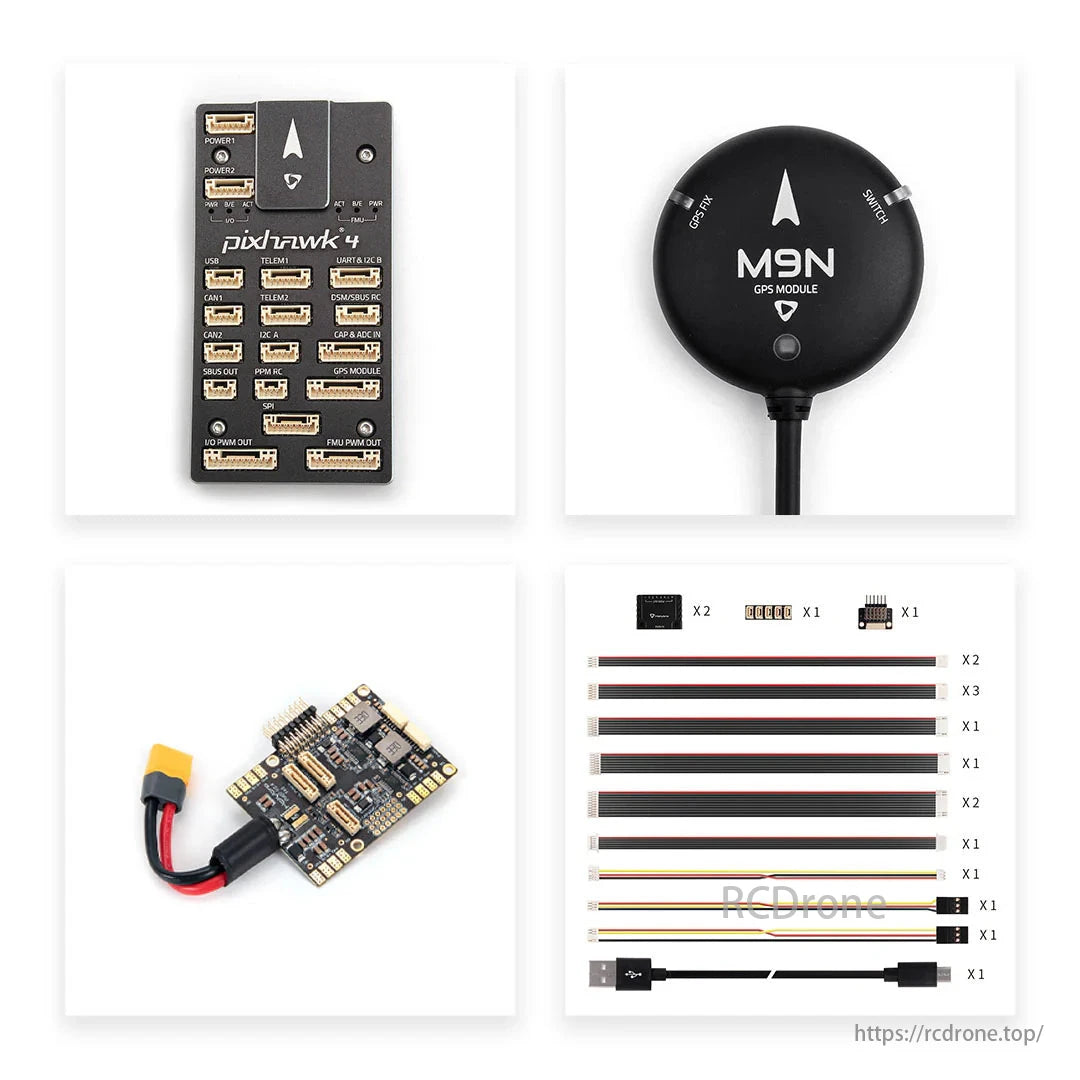
کنترلر پرواز Pixhawk 4، ماژول GPS M9N، ماژول برق با کانکتور XT60 و کابل های مختلف برای مونتاژ پهپاد RC.

فلایت کنترل Pixhawk 4 با پورت های مختلف از جمله ماژول USB، CAN و GPS. شامل یک ماژول برق و چندین کابل برای اتصال است.

فلایت کنترل Pixhawk 4، ماژول GPS M9N، ماژول پاور با کانکتور XT60 و کابل های مختلف برای اتصالات.
Related Collections