کنترلر پرواز خودکار Holybro Pixhawk 5X
کنترلر پرواز خودکار Holybro Pixhawk 5X
HolyBro
در دسترس بودن پیکاپ بارگیری نشد
Pixhawk® 5X آخرین بهروزرسانی برای خانواده موفق است Pixhawkکنترلرهای پرواز، بر اساس استاندارد باز Pixhawk® FMUv5X و استاندارد اتوبوس خودکار Pixhawk®. این دستگاه با جدیدترین PX4 Autopilot® از پیش نصب شده، افزونگی سه گانه، دامنه سنسور ایزوله با کنترل دما، ارائه می شود که عملکرد و قابلیت اطمینان باورنکردنی را ارائه می دهد.
در داخل Pixhawk® 5X، میتوانید STM32F7 مبتنی بر STMicroelectronics را بیابید که با فناوری حسگر Bosch®، InvenSense® جفت شده است، به شما انعطافپذیری و قابلیت اطمینان را برای کنترل هر وسیله نقلیه خودران، مناسب برای کاربردهای دانشگاهی و تجاری میدهد. . میکروکنترلر F7 Pixhawk® 5X دارای 2 مگابایت حافظه فلش و 512 کیلوبایت رم است. PX4 Autopilot از افزایش قدرت و RAM بهره می برد. به لطف قدرت پردازش بهروز، توسعهدهندگان میتوانند با کار توسعه خود بهرهورتر و کارآمدتر باشند و الگوریتمها و مدلهای پیچیدهتری را ارائه دهند.
استاندارد باز FMUv5X شامل IMUهای با کارایی بالا و کم نویز روی برد است که برای تثبیت بهتر طراحی شده است. IMU اضافی سه گانه و فشارسنج اضافی دوگانه در اتوبوس های جداگانه. هنگامی که خلبان خودکار PX4 نقص سنسور را تشخیص می دهد، سیستم به طور یکپارچه به دیگری تغییر می کند تا قابلیت اطمینان کنترل پرواز حفظ شود.
یک LDO مستقل هر مجموعه سنسور را با کنترل توان مستقل تغذیه می کند. عایقهای لرزشی جدید طراحیشده برای فیلتر کردن ارتعاشات با فرکانس بالا و کاهش نویز برای اطمینان از خوانش دقیق، به وسایل نقلیه اجازه میدهد تا عملکرد کلی پرواز بهتری داشته باشند. گذرگاه حسگر خارجی (SPI5) دارای دو خط انتخاب تراشه و سیگنالهای آماده داده برای حسگرهای اضافی و محموله با رابط SPI، و با میکروتراشه اترنت یکپارچه PHY (LAN8742AI-CZ-TR)، ارتباط پرسرعت با رایانههای ماموریت از طریق اترنت اکنون پشتیبانی می شود. دو پورت هوشمند نظارت بر باتری (SMBus)، پشتیبانی از ماژول INA226 SMBus Power.
Pixhawk® 5X برای توسعهدهندگان آزمایشگاههای تحقیقاتی شرکتها، استارتآپها، دانشگاهیان (تحقیق، اساتید، دانشجویان) و برنامههای تجاری عالی است. Pixhawk 5X با هر دو سازگار است PX4 خلبان خودکار & سیستم عامل Ardupilot.
توجه:
- Pixhawk 5X به پروتکل I2C برای داده های ولتاژ و جریان از ماژول برق مانند PM02D، ماژول برق آنالوگ (PM02، PM06، PM07) با Pixhawk 5X سازگار نیست. نمودار مقایسه ماژول پاور
- به طور پیش فرض با سیستم عامل PX4 عرضه می شود. کاربر همچنین می تواند با فلش کردن سیستم عامل از طریق Mission Planner یا QGroundControl از سیستم عامل Ardupilot استفاده کند.
نکات کلیدی طراحی
- کنترلر پرواز مدولار: سیستم IMU، FMU و Base جدا شده توسط یک کانکتور اتوبوس خودکار Pixhawk® 100 پین و 50 پین متصل شده است، که برای سیستمهای انعطافپذیر و قابل تنظیم طراحی شده است.
- افزونگی: 3x سنسور IMU و 2x سنسور فشارسنج در اتوبوسهای جداگانه، امکان عملکرد موازی و مداوم حتی در صورت خرابی سختافزار
- دامنههای افزونگی سهگانه: دامنههای حسگر کاملاً ایزوله با اتوبوسهای مجزا و کنترل توان جداگانه
- سیستم جداسازی لرزش برای فیلتر کردن لرزش فرکانس بالا و کاهش نویز برای اطمینان از خوانش دقیق
- رابط اترنت برای یکپارچه سازی کامپیوتر ماموریت با سرعت بالا
- کالیبراسیون سنسور خودکار که سیگنال ها و دماهای مختلف را حذف می کند
- IMU ها توسط مقاومت های گرمایشی داخلی کنترل می شوند و دمای کار بهینه IMU ها را امکان پذیر می کنند.
مشخصات فنی
- پردازنده FMU: STM32F765
- 32 بیت Arm® Cortex®-M7، 216 مگاهرتز، حافظه 2 مگابایت، رم 512 کیلوبایت
- پردازنده IO: STM32F100
- 32 بیت Arm® Cortex®-M3، 24 مگاهرتز، 8 کیلوبایت SRAM
- سنسورهای روی برد
- Accel/Gyro: ICM-20649 (نصب سخت)
- Accel/Gyro: ICM-42688P (نرم افزار نصب شده)
- Accel/Gyro: ICM-20602 یا BMI088 (نرم نصب شده)
- ماگ: BMM150
- فشارسنج: 2x BMP388
داده های الکتریکی
- رتبه بندی ولتاژ:
- حداکثر ولتاژ ورودی: 6 ولت
- ورودی برق USB: 4.75 ~ 5.25 ولت
- ورودی سروو ریل: 0~36 ولت
رابط ها
- 16- خروجی های سروو PWM
- ورودی R/C برای Spektrum / DSM
- ورودی R/C اختصاصی برای ورودی PPM و S.Bus
- ورودی اختصاصی آنالوگ / PWM RSSI و S.خروجی اتوبوس
- 4 پورت سریال همه منظوره
- 3 با کنترل جریان کامل
- 1 با محدودیت جریان جداگانه 1A
- 1 با I2C و خط GPIO اضافی برای خواننده NFC خارجی
- 2 پورت GPS
- 1 GPS کامل به همراه سوئیچ ایمنی پورت
- 1 پورت اصلی GPS
- 1 پورت I2C
- 1 پورت اترنت
- برنامه های کاربردی بدون ترانسفورماتور
- 100 مگابیت بر ثانیه
- 1 اتوبوس SPI
- 2 خط انتخاب تراشه
- 2 خط آماده داده
- 1 خط SPI SYNC
- 1 خط تنظیم مجدد SPI
- 2 اتوبوس CAN برای CAN جانبی
- CAN Bus دارای کنترلهای بیصدا فردی یا کنترل ESC RX-MUX است
- 2 پورت ورودی برق با SMBus
- 1 پورت AD & IO
- 2 ورودی آنالوگ اضافی
- 1 ورودی PWM/Capture
- 2 خط دیباگ و GPIO اختصاصی
داده های مکانیکی
- ابعاد
- ماژول کنترل پرواز: 38.8 x 31.8 x 14.6 میلی متر
- مینی پایه: 43.4 x 72.8 x 14.2 میلیمتر
- پایه استاندارد نسخه 1: 52.4 x 103.4 x 16.7 میلی متر
- Baseboard استاندارد v2A: 40.2 x 92.3 x 18.4 mm
- Baseboard استاندارد v2B: 40.2 x 98.3 x 16.9 میلیمتر
- وزن
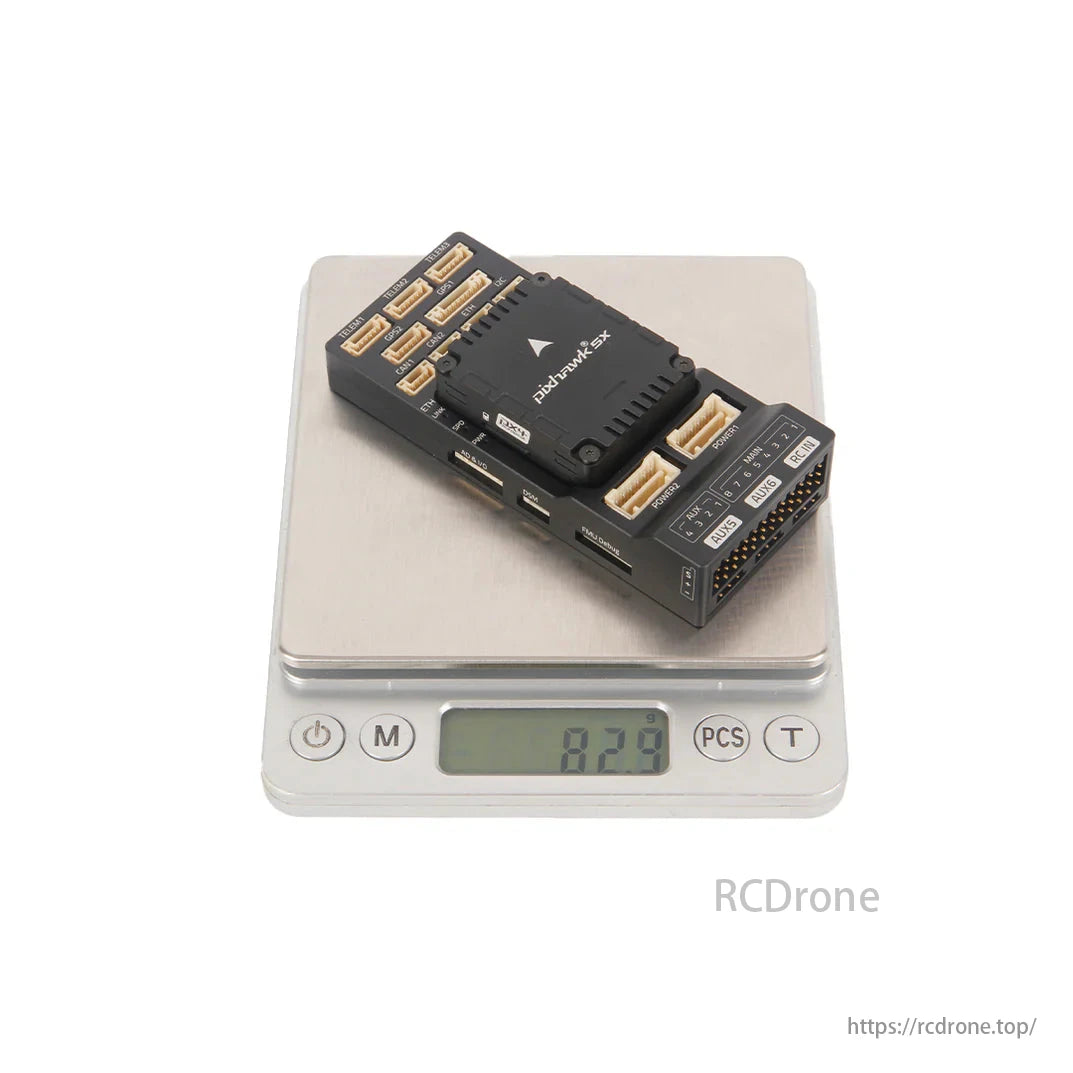
- ماژول کنترل پرواز: 23 گرم
- مینی پایه: 26.8 گرم
- پایه استاندارد نسخه 1: 51 گرم
- Baseboard استاندارد v2A: 58 گرم
- Baseboard استاندارد v2B: 58 گرم
SKU 11045 شامل:
- ماژول کنترل پرواز Pixhawk 5X
SKU 20307/SKU 20320/SKU20310 شامل:
- ماژول کنترل پرواز Pixhawk 6X
- Baseboard استاندارد v2A/v2B یا Mini Baseboard
- ماژول برق PM02D HV
- مجموعه کابل
- ماژول کنترل پرواز Pixhawk 6X
- Baseboard استاندارد v2A/v2B یا Mini Baseboard
- ماژول برق PM02D HV
- مجموعه کابل
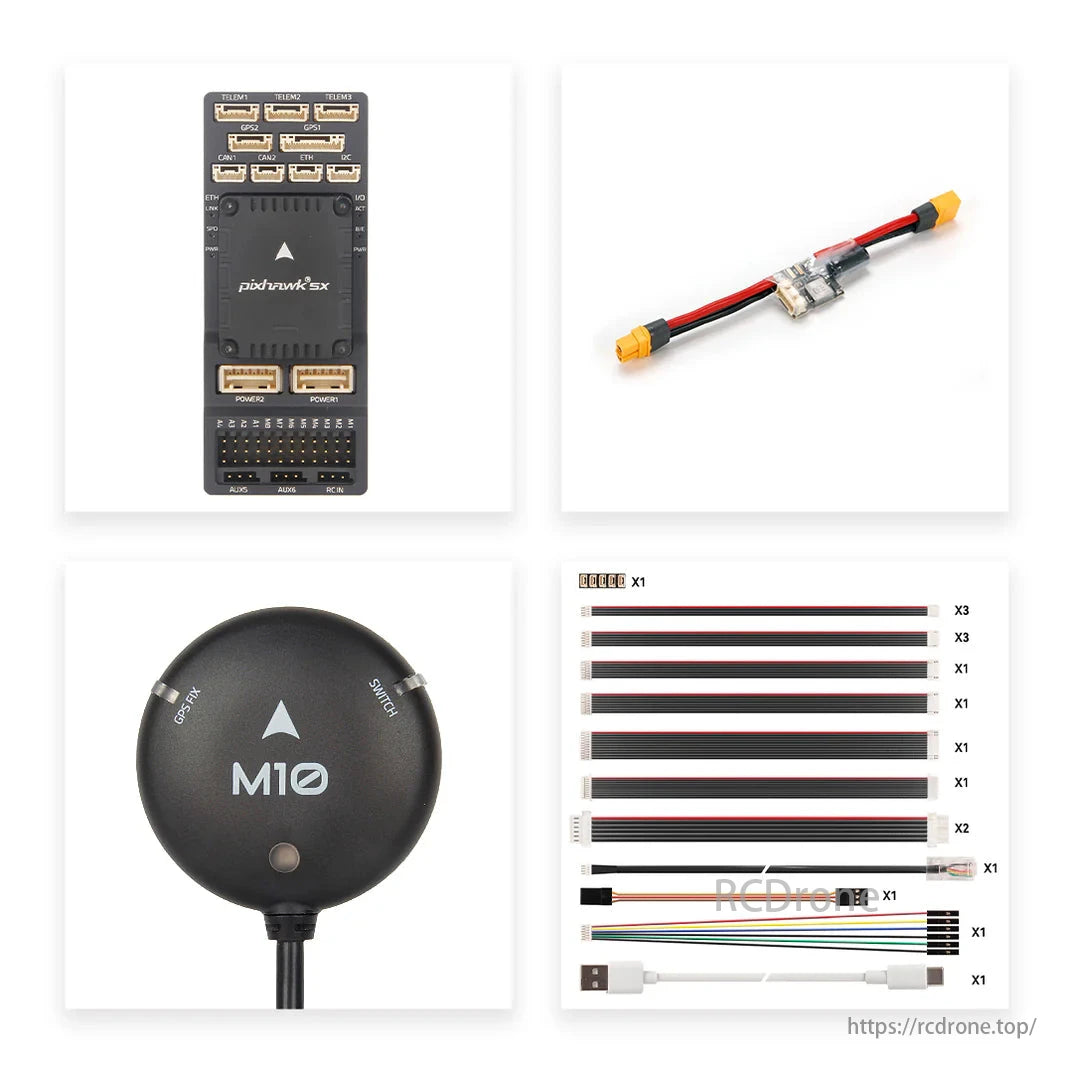
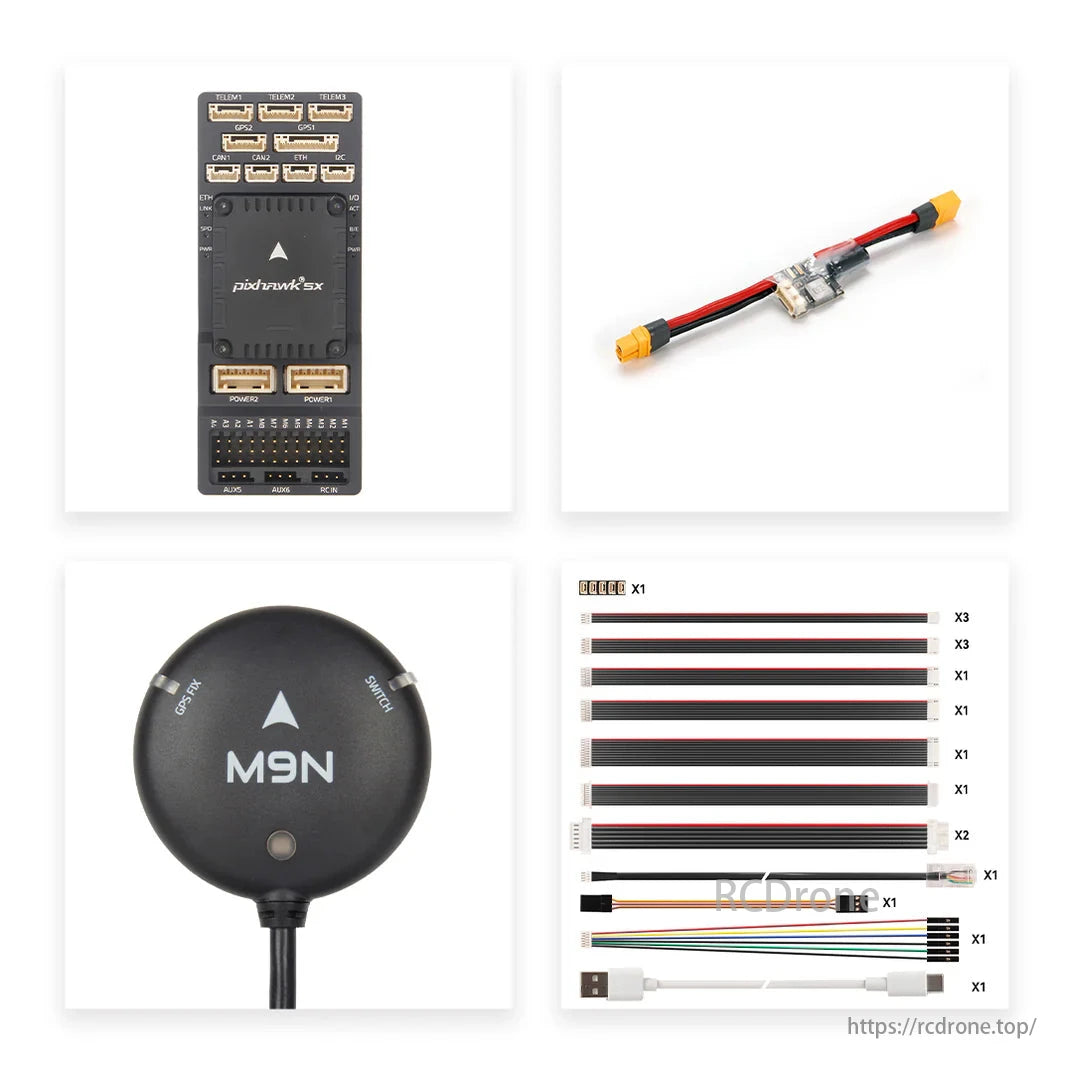
- M9N/M10 جی پی اس
Pixhawk mini، Pixhawk Baseboard v1، و دو نوع Pixhawk Baseboard v2 (v2A و v2B) با ابعاد نشان داده شدهاند. ابعاد کوچک 43.4 در 72.8 میلی متر، v1 52 x 101.90 میلی متر، v2A 40.2 x 92.3 میلی متر و v2B 40.2 x 98.3 میلی متر است.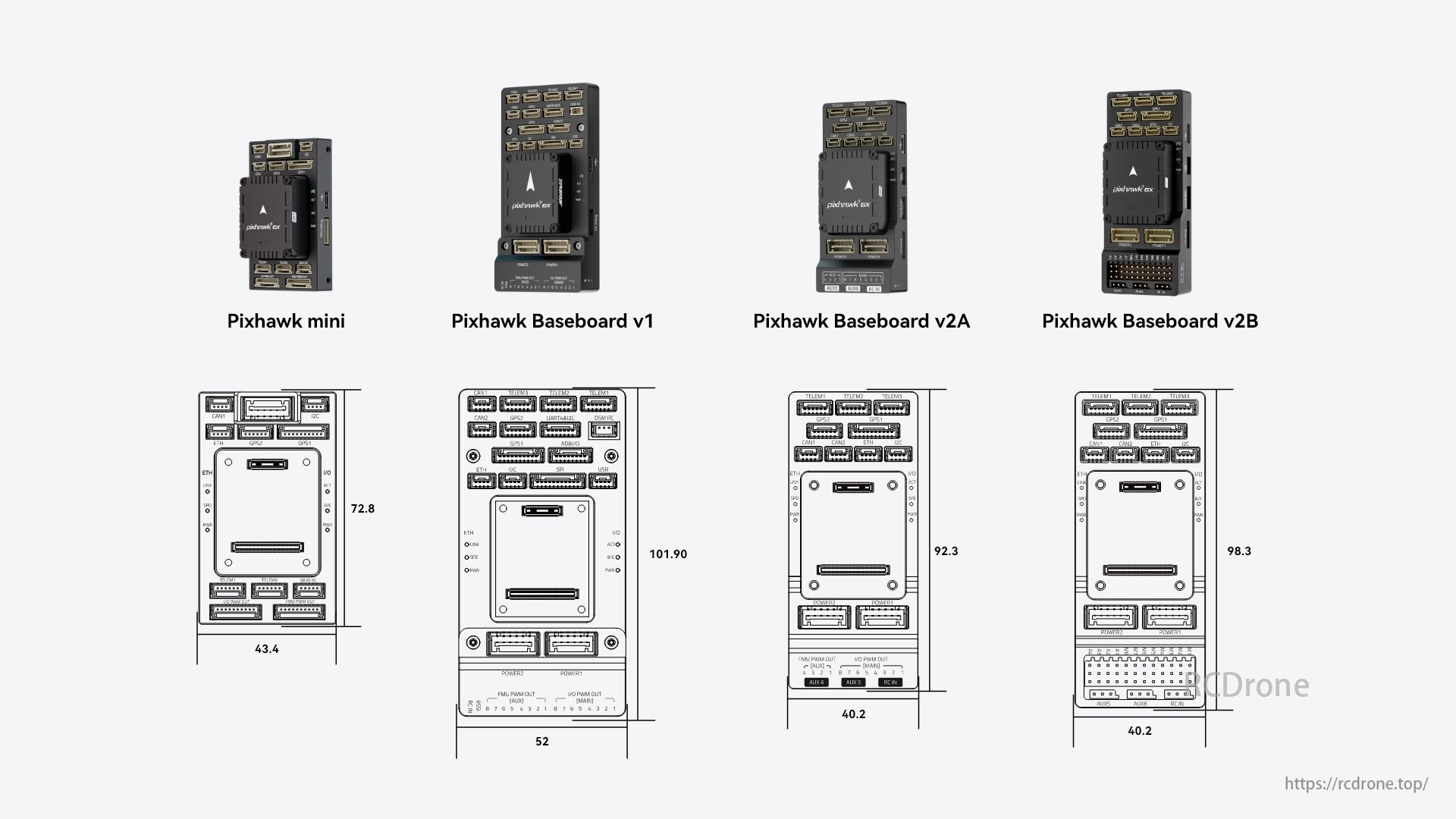
راهنمای نمونه سیم کشی

نمودار Holybro Pixhawk 5X شامل GPS اولیه و ثانویه، پورت های UART4 و I2C، CAN1 و 2، گیرنده DSM RC، رادیو تله متری، دوربین IP HD FPV، باتری، ماژول برق، ESC ها و برد توزیع برق می باشد.
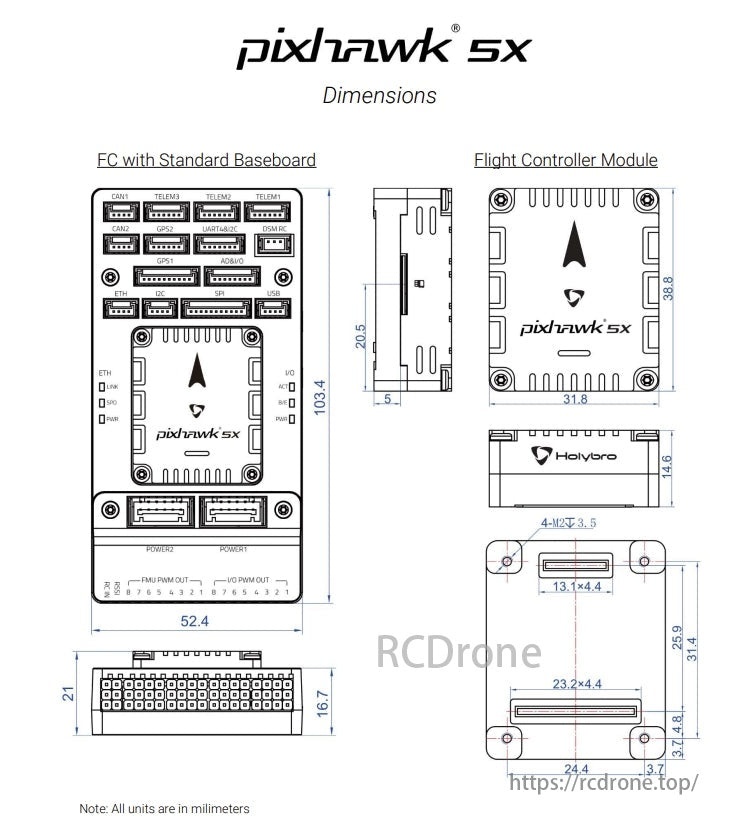
ابعاد Pixhawk SX شامل یک ماژول کنترل پرواز و FC با قرنیز استاندارد است. ابعاد ماژول 31.8 در 38.8 میلی متر است، در حالی که تخته پایه 103.4 در 52.4 میلی متر است. همه واحدها بر حسب میلی متر هستند.

ابعاد تخته پایه استاندارد: 103.4 x 58 x 10.7 میلی متر، با پورت ها و کانکتورهای مختلف از جمله USB، اترنت و ورودی های برق.


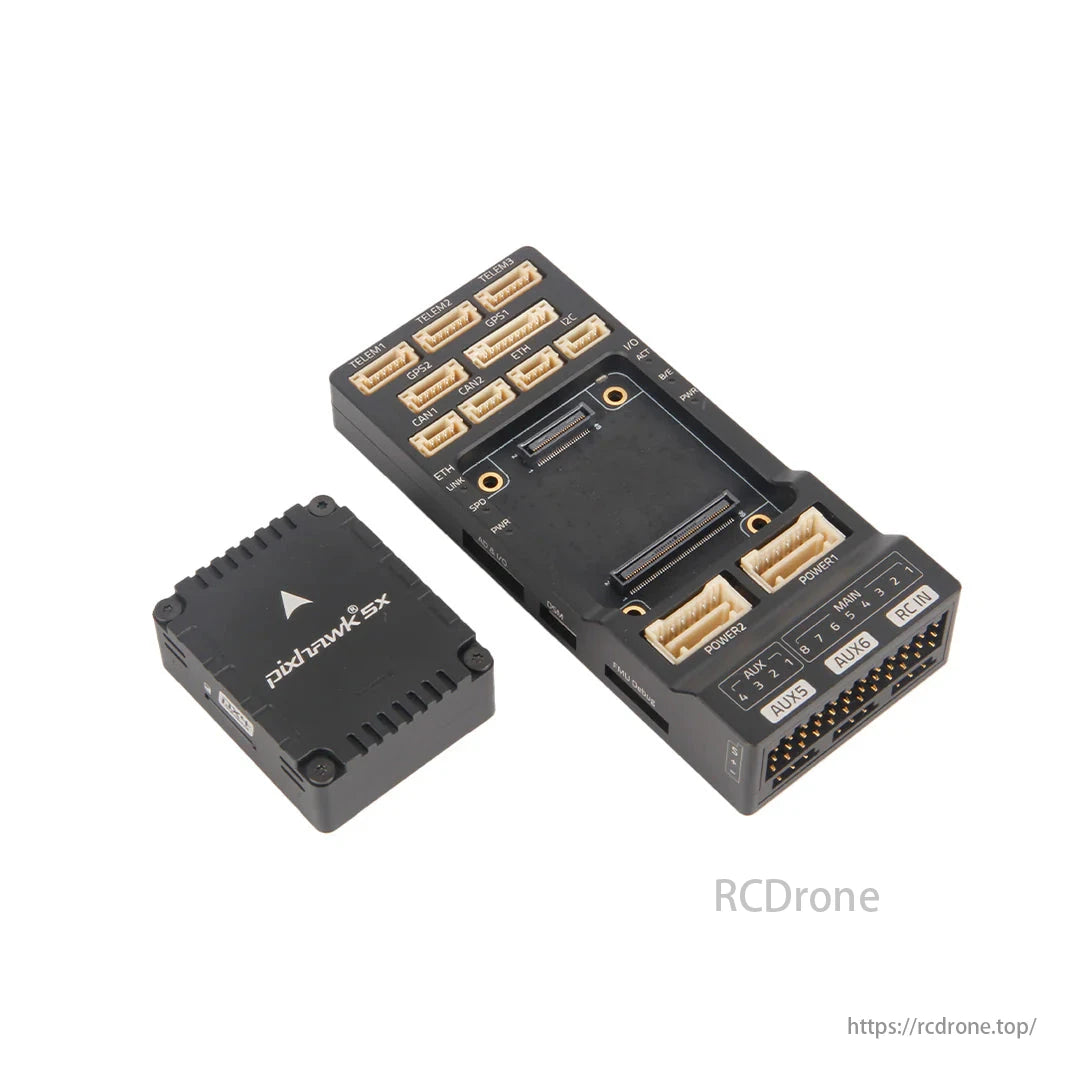
فلایت کنترل Pixhawk 5X با درگاه های TELEM1-3، GPS1-2، CAN1-2، ETH، I2C، POWER1-2، AUX5-6 و RC IN.
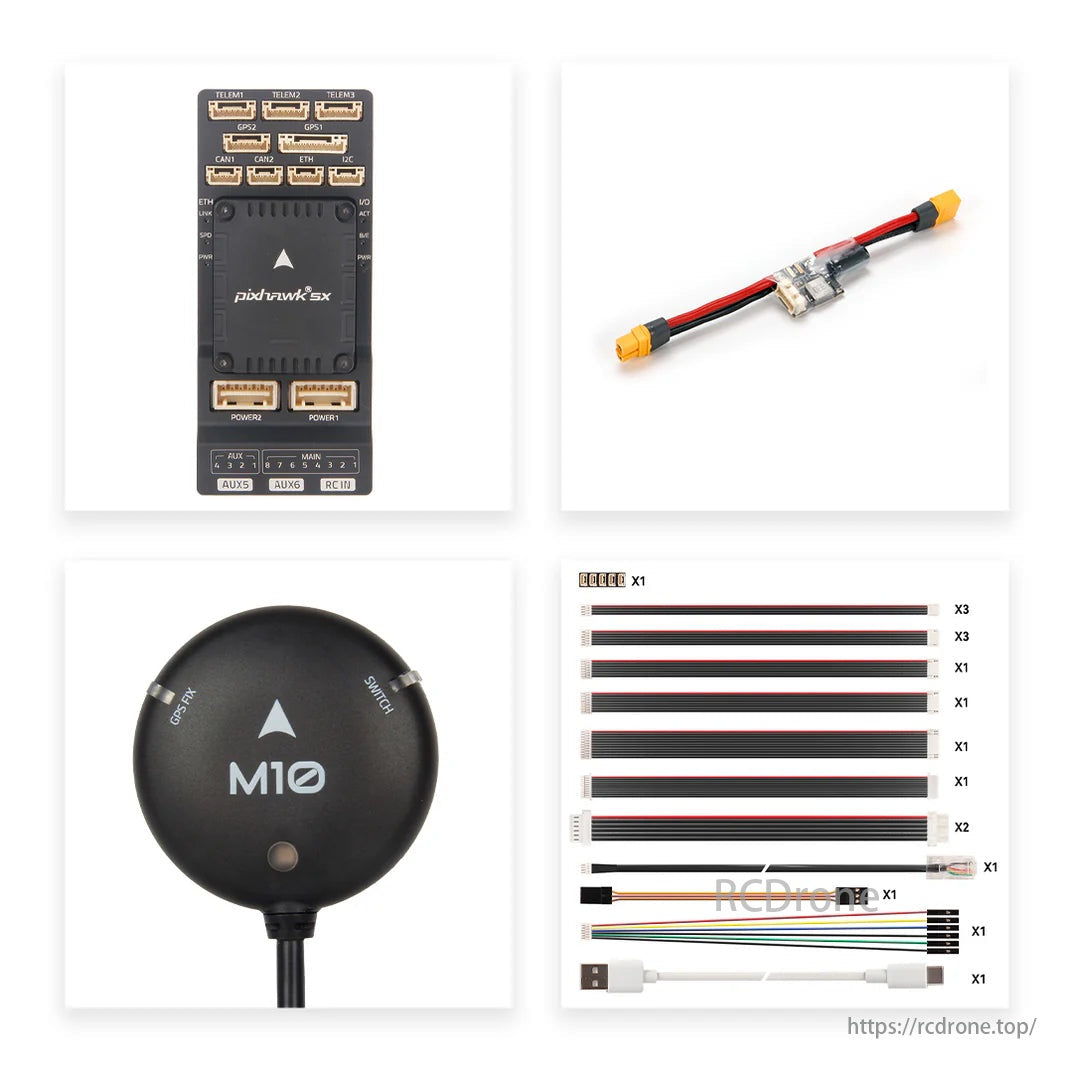
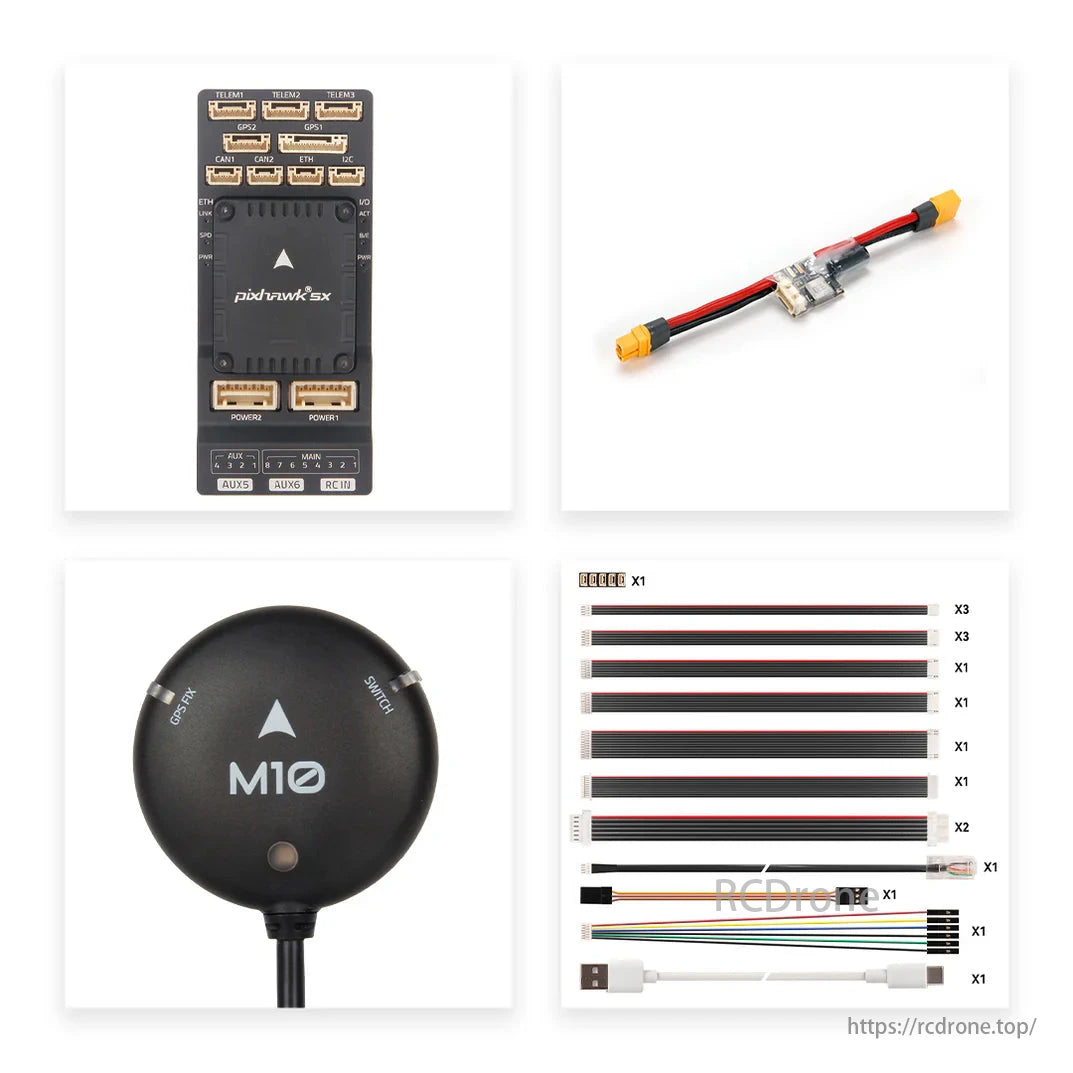
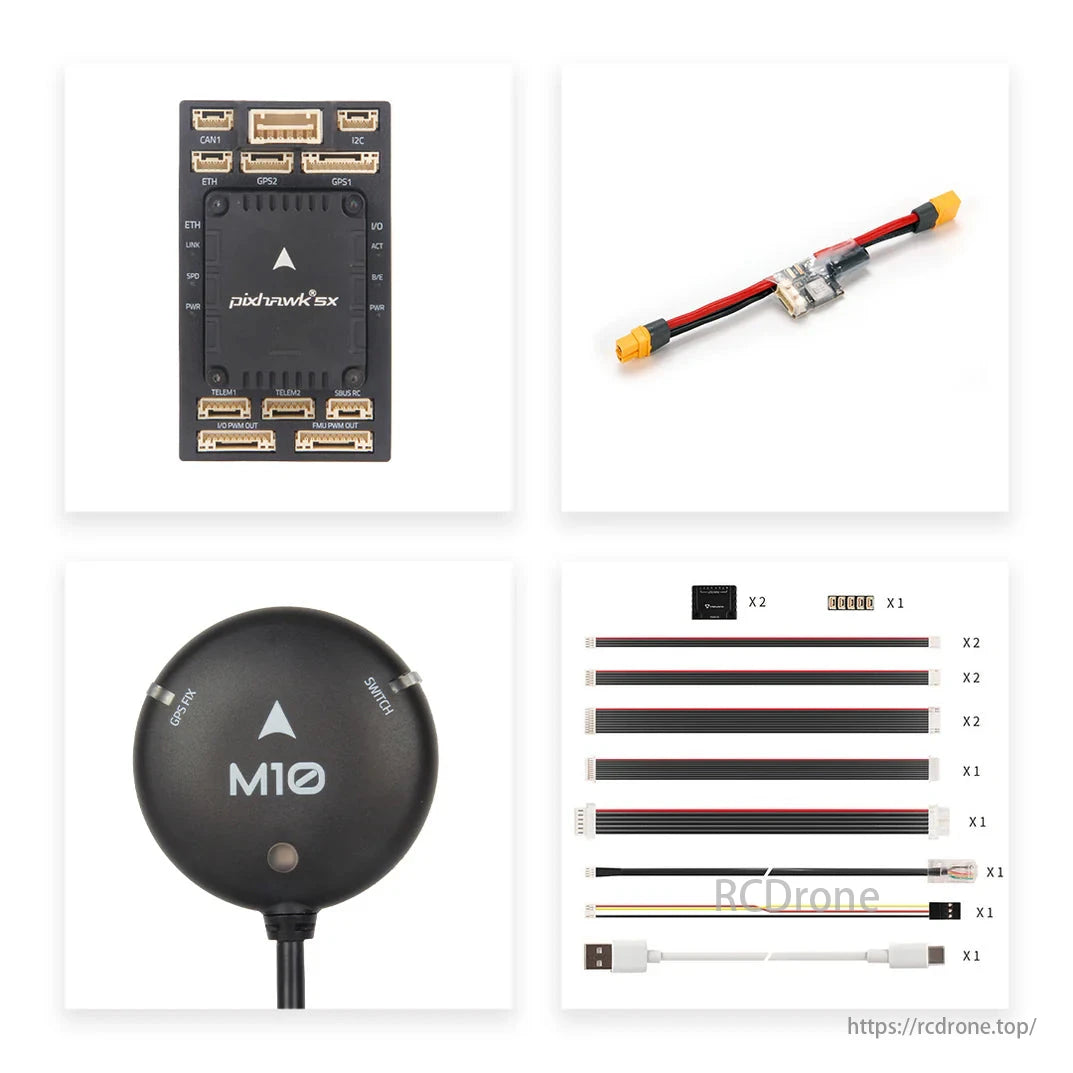
کنترلر پرواز Pixhawk 5X، ماژول GPS M10، ماژول برق و کابل های مختلف برای مونتاژ پهپاد.
Related Collections