ماژول کنترل پرواز Holybro Pixhawk 6X Autopilot H753 Base Standard / Mini Base PM02D M9N M10 GPS RC Multirotor Airplanes
ماژول کنترل پرواز Holybro Pixhawk 6X Autopilot H753 Base Standard / Mini Base PM02D M9N M10 GPS RC Multirotor Airplanes
HolyBro
در دسترس بودن پیکاپ بارگیری نشد
ماژول کنترل پرواز Holybro Pixhawk 6X Autopilot H753 برای پهپادها و هواپیماهای مولتی روتور
کنترلر پرواز Holybro Pixhawk 6X Autopilot H753 یک کنترلر پرواز مدولار پیشرفته است که برای هواپیماهای بدون سرنشین مولتی روتور صنعتی و تجاری و هواپیماهای بال ثابت طراحی شده است. Pixhawk 6X با برخورداری از فناوری پیشرفته و پیکربندیهای مختلف، عملکرد و قابلیت اطمینان بینظیری را برای برنامههای کاربردی سخت ارائه میدهد.
ویژگی های کلیدی
1. افزونگی پیشرفته و فناوری BalancedGyro™
Pixhawk 6X دارای افزونگی سه گانه با سه سنسور ICM-45686 IMU (±32g) و دو سنسور فشارسنج است. این سنسورها کاملاً ایزوله هستند و در اتوبوس های جداگانه با کنترل توان جداگانه کار می کنند و اطمینان در ماموریت های حیاتی را تضمین می کنند. فناوری BalancedGyro ™ دقت و پایداری سنسور را بهینه میکند.
2. پردازنده با کارایی بالا
کنترلر پرواز با پردازنده STM32H753 با سرعت کلاک تا 480 مگاهرتز، قابلیت های محاسباتی استثنایی را ارائه می دهد. این شامل 2 مگابایت حافظه فلش و 1 مگابایت رم برای اجرای یکپارچه ماموریت است.
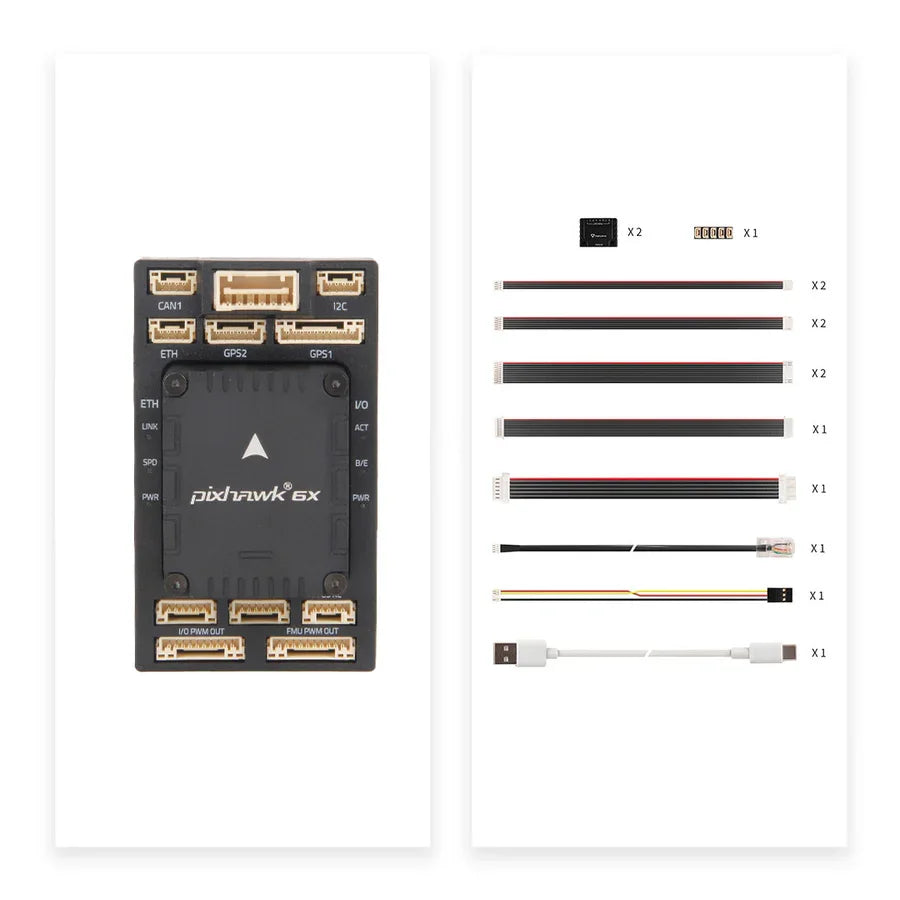
3. طراحی مدولار
Pixhawk 6X دارای طراحی ماژولار با سیستم های IMU، FMU و Base جدا شده است. این اجزا از طریق یک کانکتور 100 پین و 50 پین Pixhawk® Autopilot Bus به هم متصل می شوند که امکان سفارشی سازی و نگهداری انعطاف پذیر را فراهم می کند.
4. سیستم جداسازی ارتعاش جدید
سیستم میرایی نوآورانه Pixhawk 6X با استفاده از مواد عایق لرزش بادوام فرموله شده سفارشی، عملکرد بهینه IMU را با فرکانسهای تشدید در طیف بالاتر تضمین میکند و آن را برای کاربردهای صنعتی و تجاری ایدهآل میکند.
5. رابط اترنت
یک رابط اترنت از یکپارچه سازی کامپیوتر ماموریت با سرعت بالا پشتیبانی می کند و امکان تبادل یکپارچه داده ها را برای کنترل ماموریت پیشرفته فراهم می کند.
6. برد IMU کنترل شده با دما
برد IMU در محدوده دمایی بهینه عمل می کند و عملکرد ثابت را حتی در محیط های چالش برانگیز تضمین می کند.
7. سازگاری گسترده میان افزار
نسخه Rev 8 از سیستم عامل PX4 (1.14.3 یا بالاتر) و سیستم عامل Ardupilot (4.5.0 یا بالاتر) پشتیبانی می کند. کاربران می توانند سیستم عامل را از طریق Mission Planner یا QGroundControl برای مطابقت با نیازهای خاص خود فلش کنند.
تنظیمات
Holybro Pixhawk 6X در پیکربندی های مختلف برای رفع نیازهای مختلف موجود است:
-
پایه استاندارد: ابعاد: 52.4 x 102 x 16.7mm; وزن: 72.5 گرم (آلومینیوم)
-
مینی پایه: ابعاد: 43.4 x 72.8 x 14.2mm; وزن: 26.5 گرم
-
ماژول های GPS اختیاری: M9N، M10 GPS برای ناوبری دقیق
-
ماژول های برق: PM02D برای تحویل برق قابل اعتماد
مشخصات
پردازنده ها و حسگرها:
-
پردازنده FMU: STM32H753 32 بیت Arm® Cortex®-M7، 480 مگاهرتز، حافظه فلش 2 مگابایت، رم 1 مگابایت
-
پردازنده IO: STM32F103 32 بیت Arm® Cortex®-M3، 72 مگاهرتز، 64 کیلوبایت SRAM
-
سنسورهای IMU: 3x ICM-45686 با فناوری BalancedGyro™
-
فشارسنج ها: ICP20100 و BMP388
-
مغناطیس سنج: BMM150
-
عنصر امن: سخت افزار NXP EdgeLock SE050 Plug & Trust
داده های الکتریکی:
-
رتبه بندی ولتاژ:
-
حداکثر ولتاژ ورودی: 6 ولت
-
ورودی برق USB: 4.75 ~ 5.25 ولت
-
ورودی سروو ریل: 0~36 ولت
-
-
رتبه های فعلی:
-
محدود کننده جریان خروجی Telem1: 1.5A
-
تمام پورت های دیگر محدود کننده جریان خروجی ترکیبی: 1.5A
-
-
ولتاژ سیگنال PWM: 3.3 ولت پیش فرض (قابل تنظیم تا 5 ولت با اصلاح مقاومت داخلی)
داده های مکانیکی:
-
ابعاد ماژول کنترل پرواز: 38.8 x 31.8 x 16.8 mm; وزن: 31.3 گرم
-
گزینه های پایه:
-
پایه استاندارد: 52.4 x 102 x 16.7 میلی متر؛ وزن: 72.5 گرم
-
مینی پایه: 43.4 x 72.8 x 14.2 میلی متر. وزن: 26.5 گرم
-
برنامه های کاربردی
Holybro Pixhawk 6X برای موارد زیر طراحی شده است:
-
پهپادهای مولتی روتور صنعتی و تجاری
-
ناوبری هواپیما با بال ثابت
-
کنترل ماموریت پیشرفته با یکپارچه سازی داده ها با سرعت بالا
چه در حال ساخت یک مولتی روتور سفارشی باشید یا یک سیستم بال ثابت را تقویت کنید، Holybro Pixhawk 6X Autopilot یک راه حل همه کاره، قوی و قابل اعتماد ارائه می دهد. طراحی ماژولار، فناوری پیشرفته و گزینه های پیکربندی متعدد آن اطمینان حاصل می کند که نیازهای هر برنامه حرفه ای را برآورده می کند.
Related Collections