کنترلر پرواز Holybro Pixhawk 6X (ICM-45686) – دارای سه IMU پشتیبان، STM32H753، اترنت، سازگار با PX4 و ArduPilot
کنترلر پرواز Holybro Pixhawk 6X (ICM-45686) – دارای سه IMU پشتیبان، STM32H753، اترنت، سازگار با PX4 و ArduPilot
HolyBro
در دسترس بودن پیکاپ بارگیری نشد
بررسی
کنترلر پرواز خودکار Holybro Pixhawk 6X (ICM-45686) یک کنترلر پرواز با عملکرد بالا و ماژولار است که برای برنامههای صنعتی و تجاری دشوار طراحی شده است. این دستگاه دارای IMUهای سهگانهی اضافی ICM-45686 با فناوری BalancedGyro™، دو بارومتر و یک پردازنده STM32H753 با فرکانس 480 MHz است که قابلیت اطمینان بینظیر، عملکرد در زمان واقعی و انعطافپذیری را ارائه میدهد. معماری ماژولار، ایزولاسیون پیشرفتهی لرزش و رابط اترنت آن را برای سیستمهای UAV که به کنترل قوی، دقت و سازگاری با مأموریت نیاز دارند، ایدهآل میسازد.
ویژگیهای کلیدی
-
اضافهکردن سهگانه IMU: 3x ICM-45686 IMU (±32g) با فناوری BalancedGyro™ برای ناوبری اینرسی مقاوم در برابر خطا
-
بارومترهای دوگانه: ICP20100 و BMP388 برای دقت بیشتر در ارتفاع
-
پردازنده پرسرعت: STM32H753 Cortex-M7، 480MHz، با 2MB Flash و 1MB RAM
-
طراحی ماژولار: جداکننده FMU، IMU و برد پایه، متصل شده از طریق 100-pin و 50-pin Pixhawk® Bus
-
برد IMU کنترل دما: اطمینان از عملکرد بهینه حسگر در دماهای مختلف
-
ادغام اترنت: پشتیبانی از ارتباط پرسرعت با کامپیوترهای مأموریت
-
پشتیبانی از ماژول قدرت دیجیتال: ارائه اندازهگیریهای دقیقتر ولتاژ و جریان
سیستم ایزولاسیون پیشرفته: مواد مقاوم و فرموله شده سفارشی، کاهش ارتعاش با طیف بالا را فراهم میکند
-
سازگاری فریمور: با PX4 (v1.14.3+)، از ArduPilot (v4.5) پشتیبانی میکند.0+)
مشخصات
پردازندهها و حسگرها
| جزء | جزئیات |
|---|---|
| پردازنده FMU | STM32H753، ARM Cortex-M7، 480MHz، 2MB Flash، 1MB RAM |
| پردازنده IO | STM32F103، ARM Cortex-M3، 72MHz |
| حسگرهای IMU | 3x ICM-45686 (BalancedGyro™) |
| بارومتر | ICP20100 و BMP388 |
| مغناطیسسنج | BMM150 |
| عنصر ایمن | NXP SE050 Plug & Trust |
پارامترهای الکتریکی
| پارامتر | Value |
|---|---|
| حداکثر ولتاژ ورودی | 6V |
| ورودی برق USB | 4.75~5.25V |
| ولتاژ ریل سروو | 0~36V |
| محدودیت جریان Telem1 و GPS2 | 1.5A ترکیبی |
| محدودیت جریان پورتهای دیگر | 1.5A ترکیبی |
| ولتاژ سیگنال PWM | پیشفرض 3.3V (قابل تغییر به 5V از طریق مقاومت) |
| دمای عملیاتی | -25°C تا +85°C |
ابعاد مکانیکی و وزن
| جزء | ابعاد (میلیمتر) | وزن (گرم) |
|---|---|---|
| کنترلر پرواز | 38.8 x 31.8 x 16.8 | 31.3g |
| برد پایه استاندارد | 52.4 x 102 x 16.7 | 72.5g |
| پایه مینی | 43.4 x 72.8 x 14.2 | 26.5g |
سازگاری فریمور
-
PX4: به طور کامل از نسخه 1.14.3 و بالاتر پشتیبانی میشود
-
ArduPilot: به طور کامل از نسخه 4.5 پشتیبانی میشود.0 و بالاتر
-
پشتیبانی از فلش کردن فریمور از طریق Mission Planner یا QGroundControl
برنامهها
ایدهآل برای ادغام در:
-
پهپادهای صنعتی
-
سیستمهای UAV تجاری
-
هواپیماهای VTOL
-
پلتفرمهای تحقیقاتی دانشگاهی
-
ماموریتهای چندحسگری و با قابلیت اطمینان بالا
جزئیات

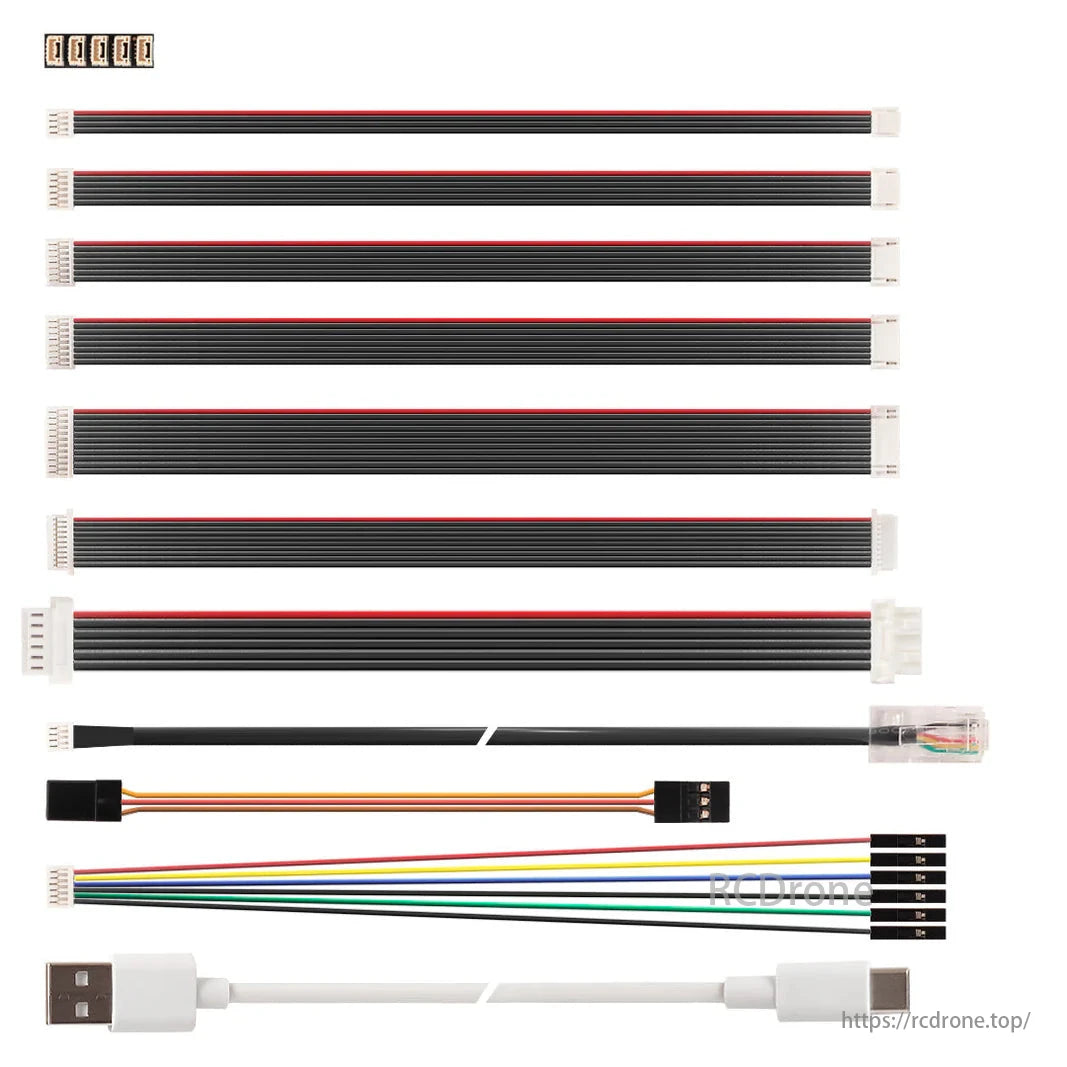
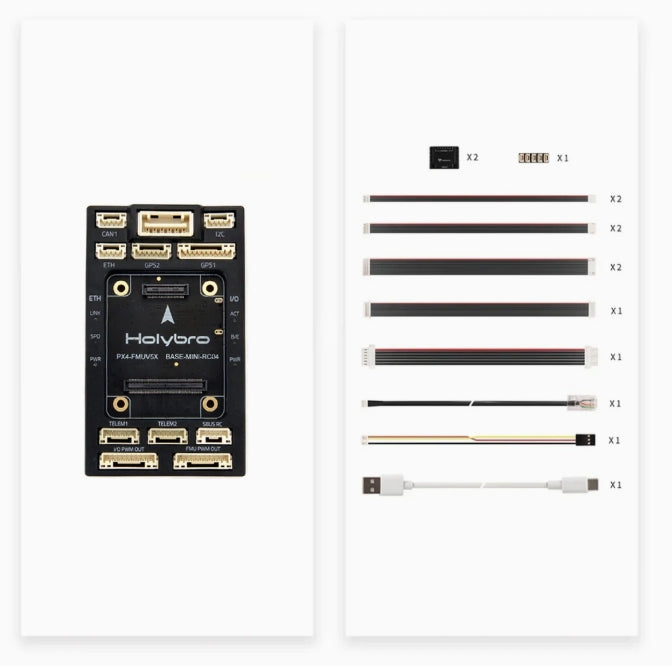
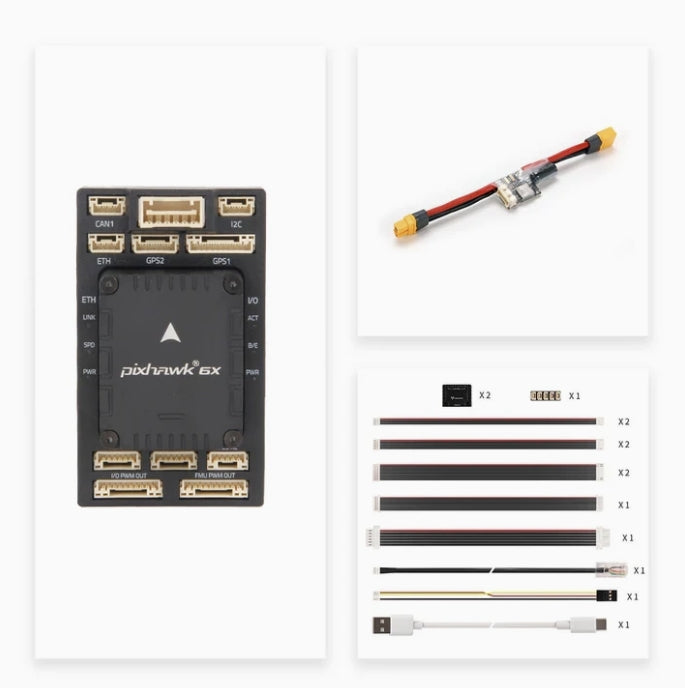
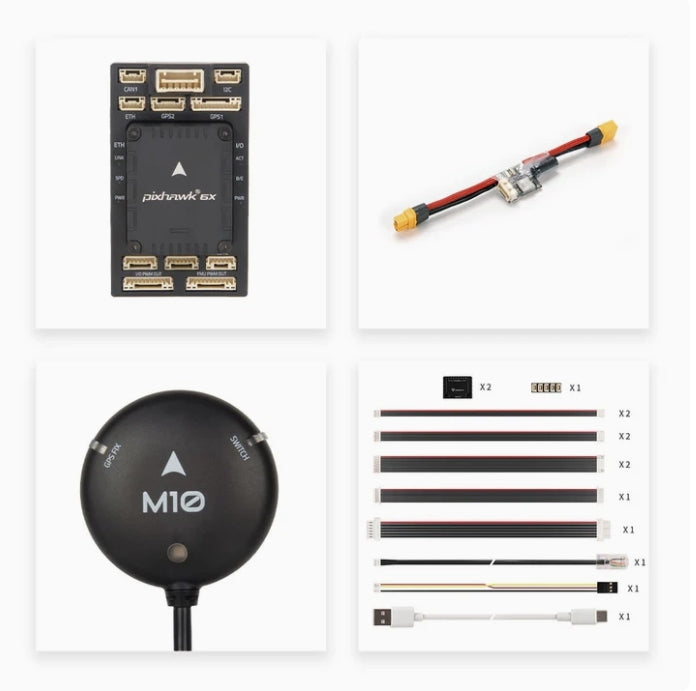
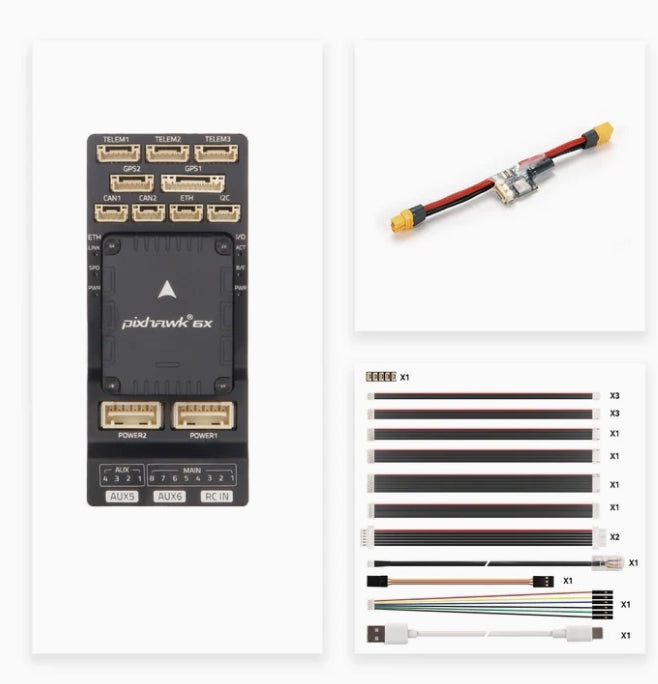
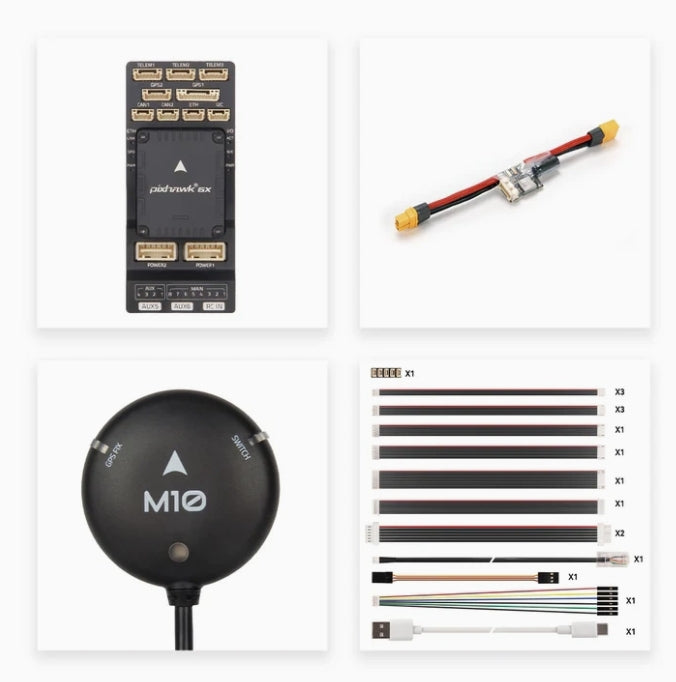
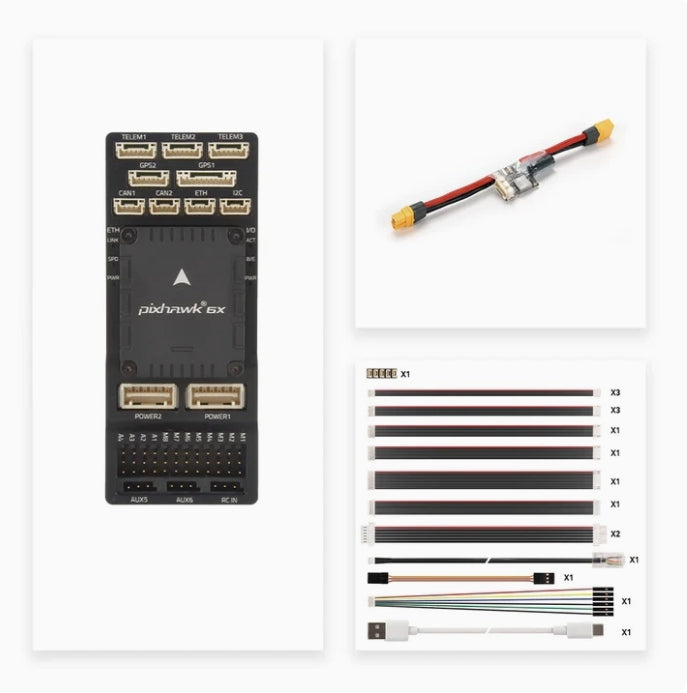
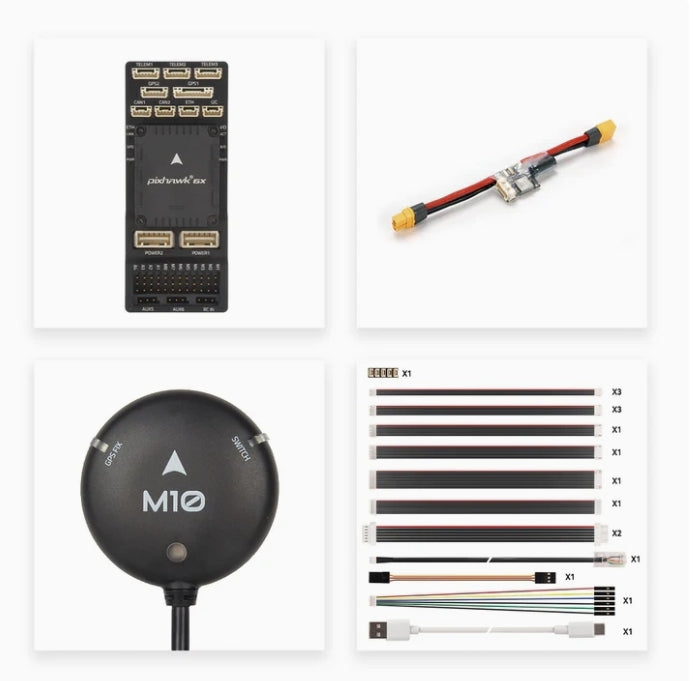
Pixhawk 6X طراحی باریکتری با دو مدل ارائه میدهد. این دستگاه دارای هدر پین بهبود یافته برای اتصال و عملکرد بهتر است و آن را برای برنامههای پیشرفته ایدهآل میسازد. مدل مناسب برای نیازهای خود را انتخاب کنید.
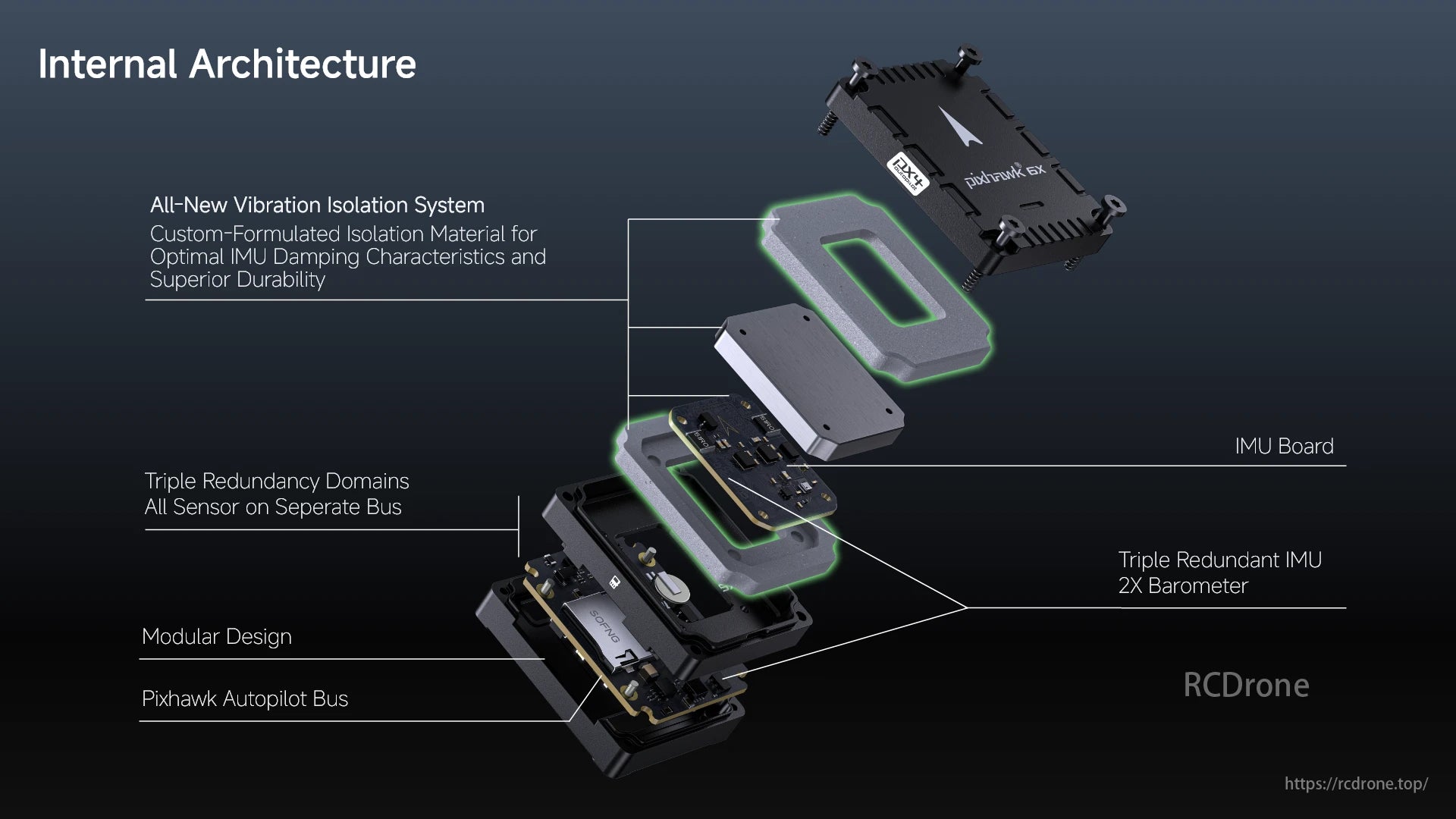
هلیبرود پیکساوک 6X دارای ایزولاسیون لرزش، سهگانه افزونگی، طراحی ماژولار، اتوبوس خودکار، برد IMU و 2x بارومتر برای عملکرد پیشرفته است.
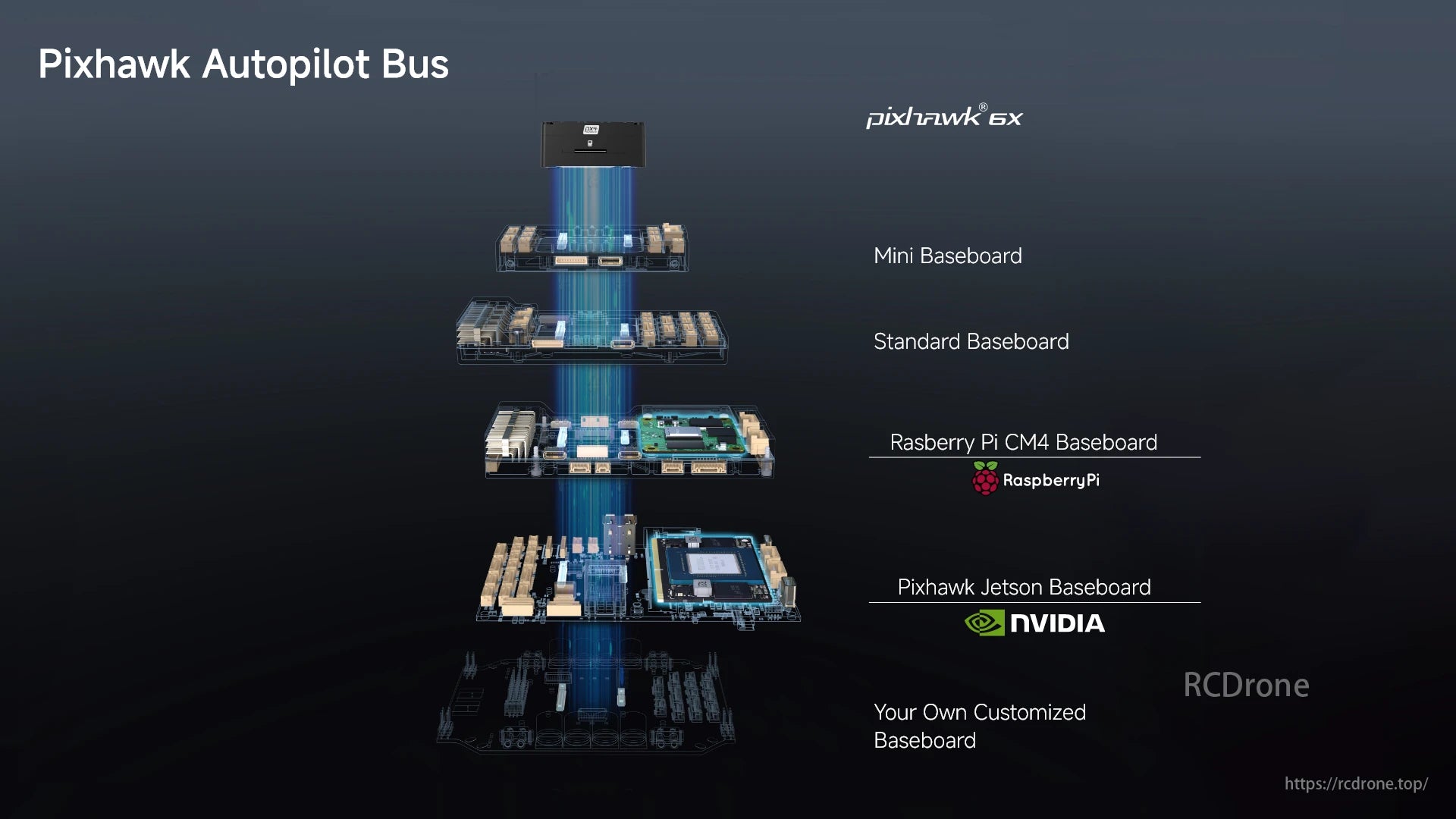
پیکساوک اتوبوس خودکار شامل پیکساوک 6X، برد پایه مینی، برد پایه استاندارد، برد پایه Raspberry Pi CM4، برد پایه Jetson و گزینههای سفارشی است.

مقاومتهای جبران دما، IMU و بارومتر افزونگی، فناوریهای حسگر متنوع و مواد ایزوله دقت را تضمین میکنند.

اتوبوس خودکار پیکساوک، پردازنده STM H753 32-Bit (480 MHz)، IMU Invensense ICM45686 با فناوری BalancedGyro و عنصر امن NXP EdgeLock SE050 در برد FMU یکپارچه شدهاند.
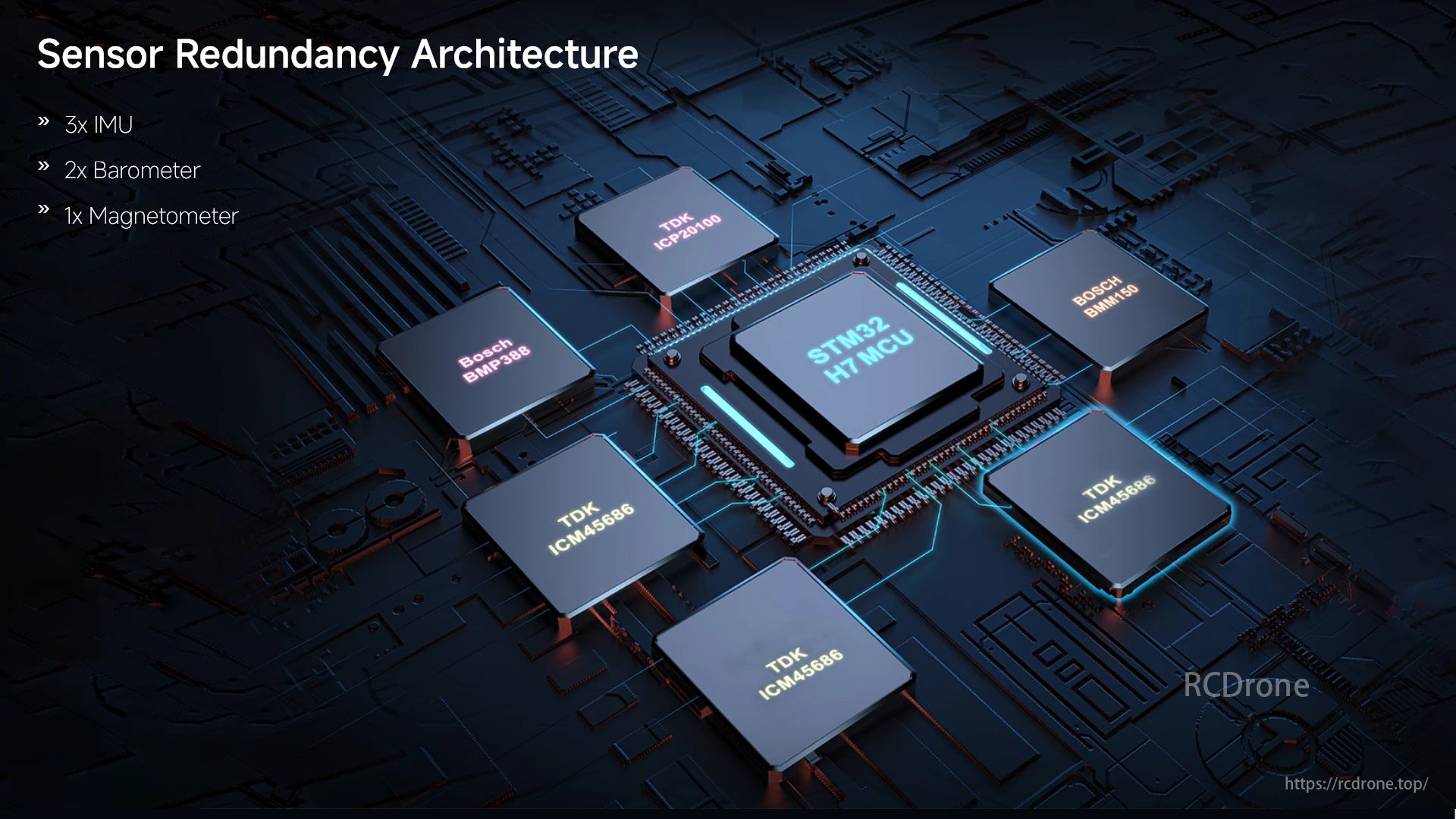
معماری افزونگی حسگر با 3x IMU، 2x بارومتر و 1x مغناطیسسنج.ویژگیها: میکروکنترلر STM32 H7، سنسورهای TDK ICM-45686، Bosch BMP388 و BMM50 برای عملکرد بهتر.
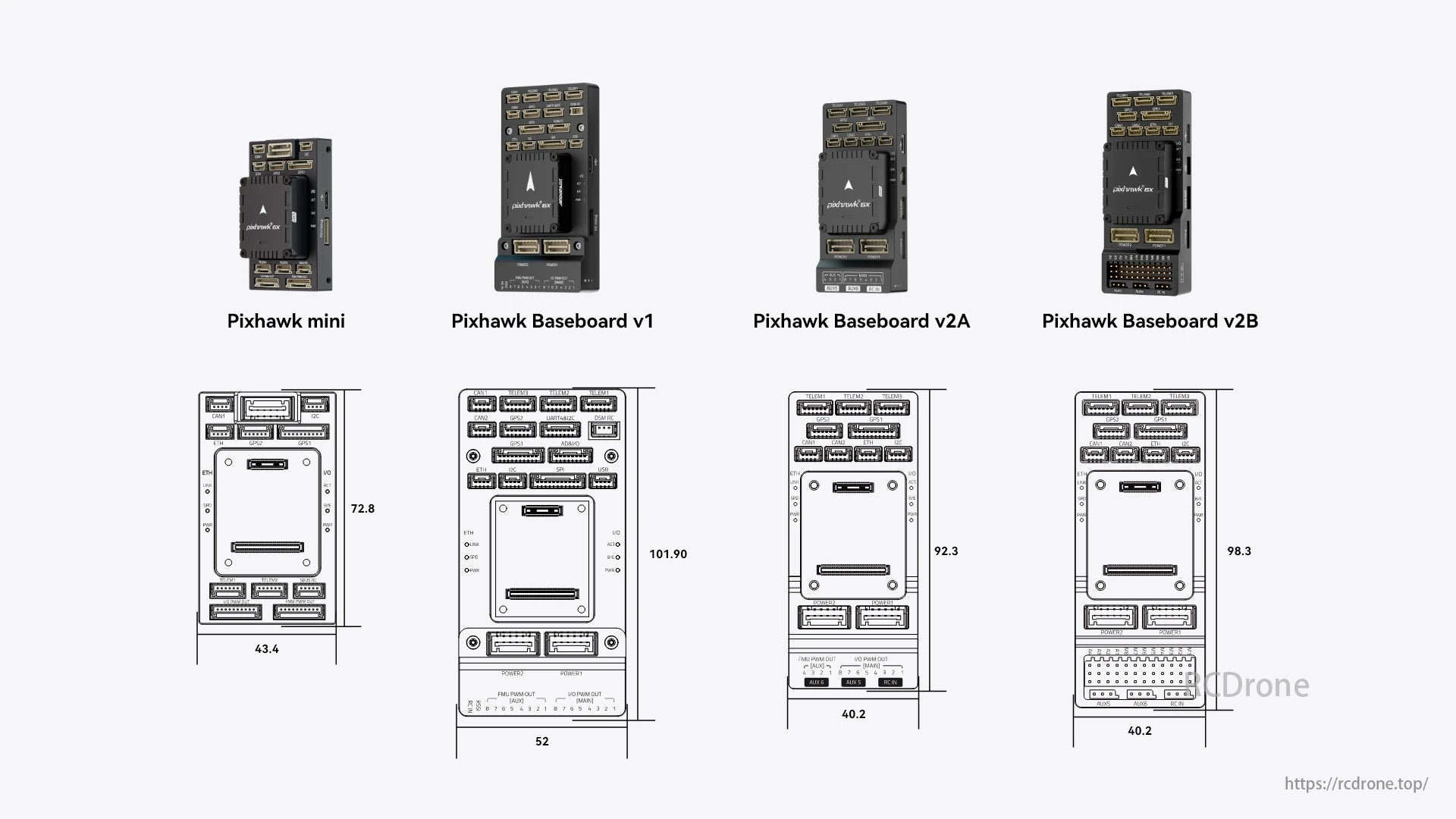
کنترلکنندههای پرواز Pixhawk mini، Baseboard v1، v2A و v2B با ابعاد: 43.4x72.8، 52x101.90، 40.2x92.3 و 40.2x98.3 به ترتیب. پورتها و کانکتورهای مختلفی در هر مدل قابل مشاهده است.
Related Collections